本文主要是介绍操作系统——处理机的调度与死锁,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
处理机调度的层次和调度算法的目标
处理机调度的层次
处理机调度的基本概念
处理机调度的层次
- 高级调度:又称为作业调度或长程调度(Long-Term Scheduling),用于决定把外存上处于后备队列中的哪些作业调入内存,并为它们创建进程、分配必要的资源,然后将新创建的进程排在就绪队列上,准备执行。 因此有时也称作业调度为接纳调度。主要用于多道批处理系统,而在分时和实时系统中不设置高级调度
在每次执行作业调度时,都须作出两个决定:
接纳多少作业——每次接纳多少作业进入内存,即允许多少个作业同时在内存中运行—多道程序度。其确定应根据系统的规模、运行速度等情况综合考虑。
接纳哪些作业——应接纳哪些作业从外存调入内存,取决于所采用的调度算法。如先来先服务,短作业优先等
- 低级调度:通常也称为进程调度或短程调度(Short-Term Scheduling),用来决定就绪队列中的哪个进程应获得处理机,然后再由分派程序把处理机分配给该进程。**为最基本的一种调度,**三种OS中都有
进程调度可采用下述两种调度方式:
非抢占方式(Non-preemptive Mode)
一旦把处理机分配给某进程后,便让该进程一直执行,直至该进程完成或发生某事件而被阻塞时,才把处理机分配给其他进程,决不允许进程抢占已分配出去的处理机。
评价:实现简单、系统开销小;适用于大多数的批处理OS,但在要求比较严格的实时系统中,不宜采用这种调度方式
抢占方式(Preemptive Mode)
允许调度程序根据某种原则,去暂停某个正在执行的进程,将处理机重新分配给另一进程。
抢占的原则:
优先权原则:优先权高的可以抢占优先级低的进程的处理机。
短作业(进程)优先原则:短作业(进程)可以抢占长作业(进程)的处理机。
时间片原则:各进程按时间片运行,一个时间片用完时,停止该进程执行重新进行调度。
- 中级调度:又称中程调度(Medium-Term Scheduling)。引入目的是为了提高内存利用率和系统吞吐量。为此,应使那些暂时不能运行的进程不再占用宝贵的内存资源,而将它们调之外存去等待,把此时的进程状态称为就绪驻外存状态或挂起状态。当这些进程重又具备运行条件、且内存又稍有空闲时,由中级调度来决定把外存上的哪些又具备运行条件的就绪进程,重新调入内存,并修改其状态为就绪状态,挂在就绪队列上等待进程调度。
中级调度实际上就是存储器管理中的对换功能
进程调度的运行频率最高,在分时系统中通常是10~100ms便进行一次进程调度,因而进程调度算法不能太复杂,以免占用太多的CPU时间。
作业调度是发生在一个作业运行完毕,退出系统,而需要重新调度一个作业进入内存时,故作业调度的周期较长,大约几分钟一次。因而也允许作业调度算法花费较多的时间。
中级调度的运行频率,基本上介于进程调度和作业调度之间。
调度队列模型
- 仅有进程调度的调度队列模型
在分时系统中,通常仅设置进程调度。系统可以把处于就绪状态的进程组织成栈、树或一个无序链表,形式取决于OS类型和所采用的调度算法。
在分时系统中就绪进程组织成FIFO队列形式,按时间片轮转方式运行。

- 具有高级和低级调度的调度队列模型
在批处理系统中,不仅需要进程调度,而且还需要作业调度,由作业调度按一定的调度算法,从外存的后备队列中选择一批作业调入内存,并为它们建立进程,送入就绪队列,然后才由进程调度算法按照一定的进程调度算法,选择一个进程,把处理机分配给该进程。

- 同时具有三级调度的调度队列模型
当在OS中引入中级调度后,可以把进程的就绪状态分为内存就绪和外存就绪。也可以把阻塞状态分为内存阻塞和外存阻塞两种状态。在调出操作的作用下,可使进程状态由内存就绪转变为外存就绪,由内存阻塞转变为外存阻塞;在中级调度的作用下,又可使外存就绪转变为内存就绪。

处理机调度的算法的目标
- 处理机调度算法的共同目标
- 资源利用率
- 公平性
- 平衡性
- 策略强制执行
- 批处理系统的目标
- 周转时间短
- 系统吞吐量高
- 处理机利用率好
- 分时系统的目标
- 响应时间快
- 均衡性
- 实时系统的目标
- 截止时间的保证
- 可预测性
实时调度的算法分类
分类:
- 根据实时任务性质的不同,分为硬实时调度算法和软实时调度算法;
- 按调度方式的不同,分为非抢占调度算法和抢占调度算法;
- 根据调度程序调度时间的不同,分为静态调度算法和动态调度算法。
- 多处理机环境下,可分为集中式调度和分布式调度两种算法
最早截止时间优先EDF算法
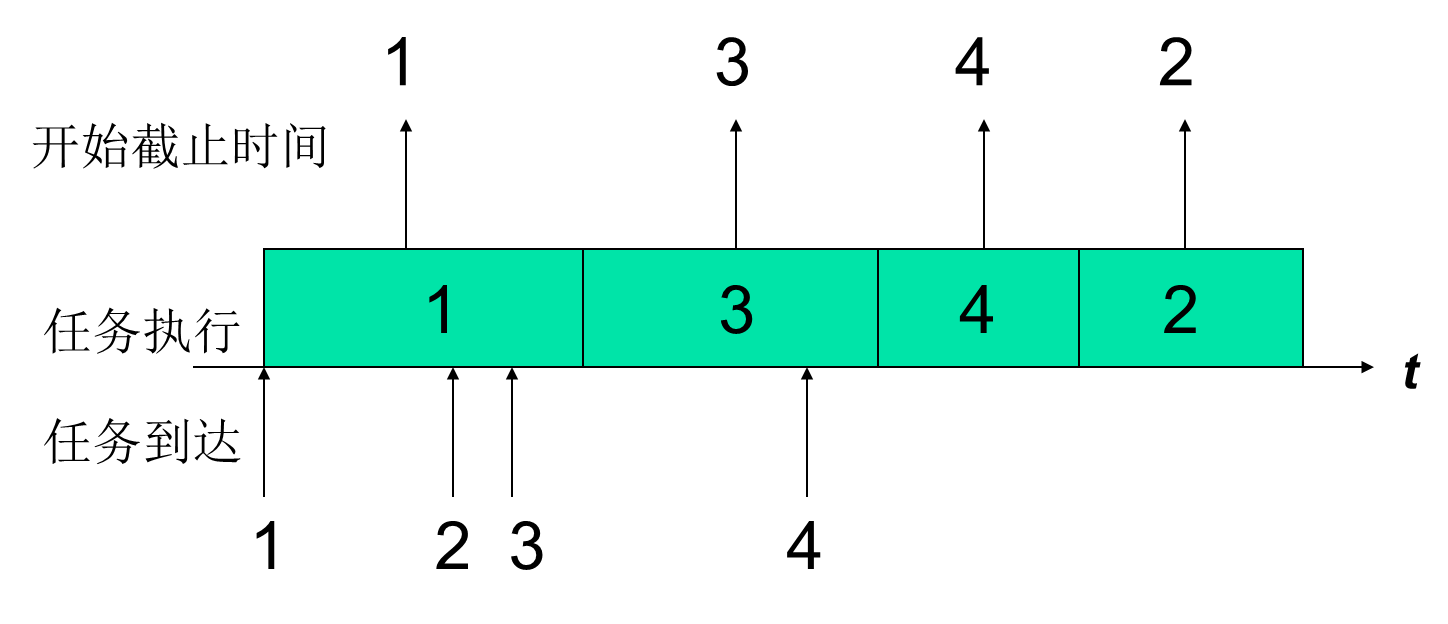
根据任务的截止时间来确定任务的优先级。截止时间越早,其优先级越高。该算法要求在系统中保持一个实时任务就绪队列,该队列按各任务截止时间的早晚排序,调度程序在选择任务时总是选择就绪队列中的第一个任务,为之分配处理机,使之投入运行。
EDF算法既可以用于抢占式调度,也可用于非抢占式调度。
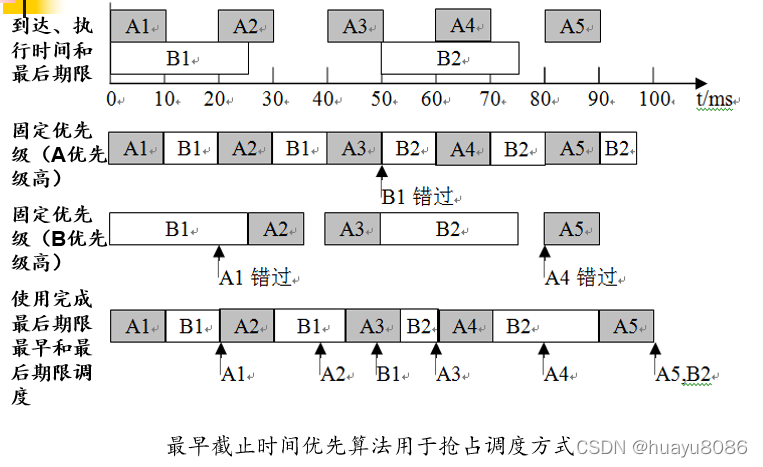
抢占式调度方式用于周期实时任务
下图中有两个周期性任务,任务A的周期时间为20ms,每个周期的处理时间为10ms;任务B的周期时间为50ms,每个周期的处理时间为25ms
解:
在t=0时,A1和B1同时到达A1的开始截止时间为10,B1为25,所以A1执行,当A1执行完后,只有B1了,所以让B1执行10,然后A2到达,此时B1开始截止时间为35,A2为30,所以A2执行10,然后只有B1了,所以让B1继续执行10,此时A3到达,A3开始截止时间为50,B1为45,所以B1继续执行5(B1全部执行完),后只有A3了,所以让A3执行5,此时B2到了,但是B2开始截止时间为75,A3为55,所以A3继续执行5,然后只剩下了B2,所以让B2执行5,此时A4又到了,A4的开始截止时间为70,B2为80,所以A4执行10,然后又是只有B2了,所以B2执行执行10,然后A5到了,A5的开始截止时间为90,B2的也是90,为了符合实际和节省资源,所以让B2继续执行10,然后A5执行10。
最低松弛度优先LLF算法
该算法是根据任务紧急(或松弛)的程度,来确定任务的先级。任务的紧急程度越高,为之赋予的优先级就越高。
例如,任务A在200ms时必须完成,本身运行时间100ms,则必须在100ms之前调度执行,A任务的紧急(松弛)程度为100ms,又如任务B在400ms是必须完成,需运行150ms,其松弛程度为250ms.
该算法主要用于抢占调度方式中。
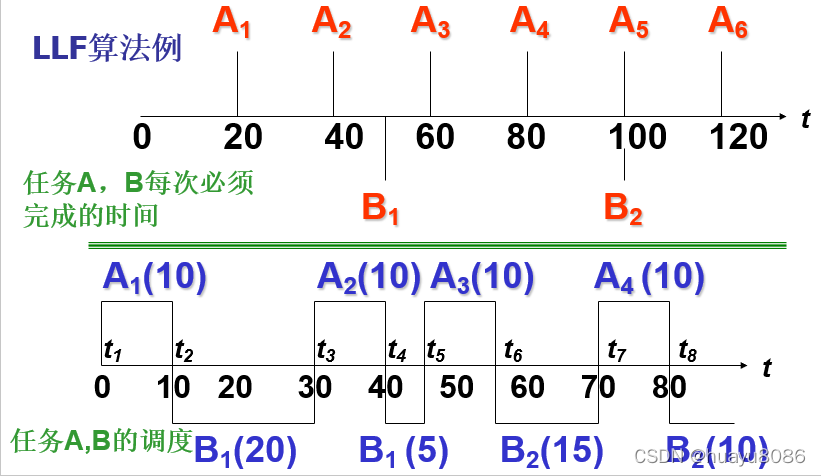
假如在一个实时系统中,有两个周期型实时任务A,B,任务A要求每20ms执行一次,执行时间为10ms;任务B要求每50ms执行一次,执行时间为25ms;由此可得知A,B任务每次必须完成的时间分别为A1、A2、A3…和B1、B2、B3…
解:
做此题需要明白:松弛度 = 完成 截止时间 - 需要运行时间 - 当前时刻
当某一时刻算出某一进程的松弛度为0,代表着这个进程必须马上执行!!!!!
在t=0时,A1的松弛度为:20-10-0=10,B1的松弛度为50-25-0=25,所以让A1执行,然后剩下了B1,因为没得选所以让B1执行,在t=20时,B1的松弛度为50-25-20=15,A2到了,A2的松弛度为:40-10-20=10不为0,没有到达必须要运行的地步,所以B1继续运行,当t=30时,A2的松弛度为0,需要马上执行A2,然后A3到了,A3松弛度为10,B1松弛度为50-5-40=5,切换B1运行,后只剩下A3,运行A3,当t=50时B2到了,B2松弛度为100-25-50=25,A3松弛度为60-5-50=5,所以继续执行A3,然后只剩下B2了,所以执行B2, 当t=60时A4到了,A4松弛度为10,B2的松弛度为100-20-60=20,而A4的松弛度并未达到0,所以继续运行B2,当t=70时,A4的松弛度为0,所以运行A4,之后A5到达,A5的松弛度为10,B2的松弛度为100-10-80=10,两者相等,但是为了符合实际和节省资源,所以让B2继续执行10,然后A5执行10。
这篇关于操作系统——处理机的调度与死锁的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








