本文主要是介绍OSQP文档学习,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
OSQP官方文档
1 QSQP简介
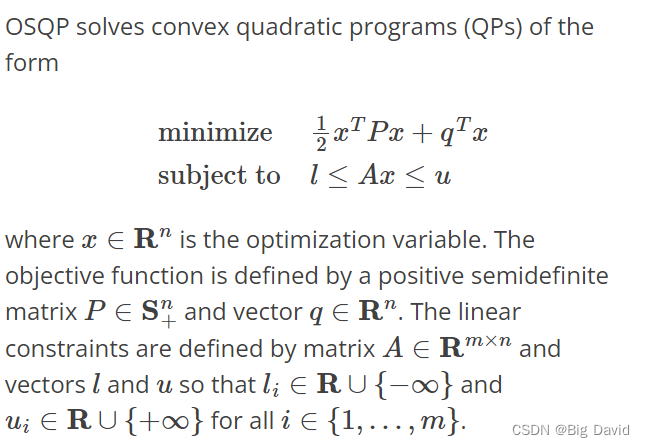
OSQP求解形式为的凸二次规划:

x ∈ R n x∈R^n x∈Rn:优化变量
P ∈ S + n P∈S^n_+ P∈S+n:半正定矩阵
特征
(1)高效:使用了一种自定义的基于ADMM的一阶方法,只需要在设置阶段进行单个矩阵分解。
(2)鲁棒:该算法设置之后不需要对问题数据进行假设(问题只需要是凸的)。
(3)原始/对偶不可行问题:当问题是原始或对偶不可行时,OSQP会检测到它。这是第一个基于一阶方法的QP求解器。
(4)可嵌入:有一个简单的接口来生成定制的可嵌入C代码,而不需要内存管理器。
(5)不需要外部库即可运行
(6)可以很容易地进行热启动,并且可以缓存矩阵分解,以非常有效地解决参数化问题
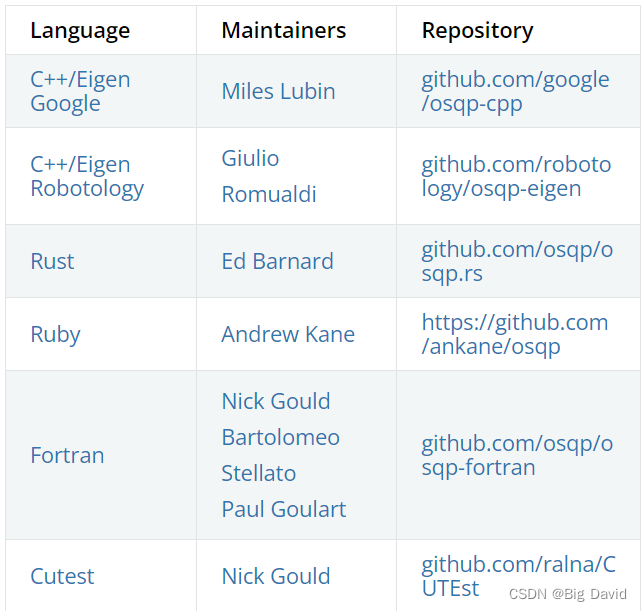
(7)接口:提供了到C、C++、Fortran、Julia、Matlab、Python、R、Ruby和Rust的接口
2 OSQP求解器
求解器运行以下ADMM算法:

Π \Pi Π:投影到超盒上 [ l , u ] [l,u] [l,u], ρ \rho ρ是ADMM步长
Linear system solution
线性系统解是算法的核心部分。它可以使用直接或间接的方法来完成。
使用直接线性系统求解器,我们求解以下具有拟定矩阵的线性系统:

使用间接线性系统求解器,我们求解以下具有正定矩阵的线性系统:

OSQP核心旨在支持不同的线性系统求解器。
Convergence
在每k次迭代时,OSQP生成一个元组 ( x k , z k , y k ) (x^k,z^k,y^k) (xk,zk,yk),
x k ∈ R n , z k 、 y k ∈ R m x^k∈R^n,z^k、y^k∈R^m xk∈Rn,zk、yk∈Rm
与 ( x k , z k , y k ) (x^k,z^k,y^k) (xk,zk,yk)相关的原始残差和对偶残差:



不可行问题
OSQP能够检测问题是原始不可行还是对偶不可行。

3 Get started
安装:
Linux操作系统,默认gcc,cmake已经安装好
① 克隆存储库
git clone https://github.com/osqp/osqp
② 创建目录和更改目录build
cd osqp
mkdir build
cd build
③ 创建 Makefile
cmake -G "Unix Makefiles" ..
④ 编译 OSQP
cmake --build .
C语言:
在 CMake 项目中包括 OSQP,具体取决于您需要共享库还是静态库:
# Find OSQP library and headers
find_package(osqp REQUIRED)# Link the OSQP shared library
target_link_libraries(yourTarget PRIVATE osqp::osqp)# or...# Link the OSQP static library
target_link_libraries(yourTarget PRIVATE osqp::osqpstatic)
4 接口
OSQP有几个接口。以下链接中显示了有关设置、状态值以及如何指定不同线性系统解算器的信息
Solver settings
Linear Systems Solvers
Status values
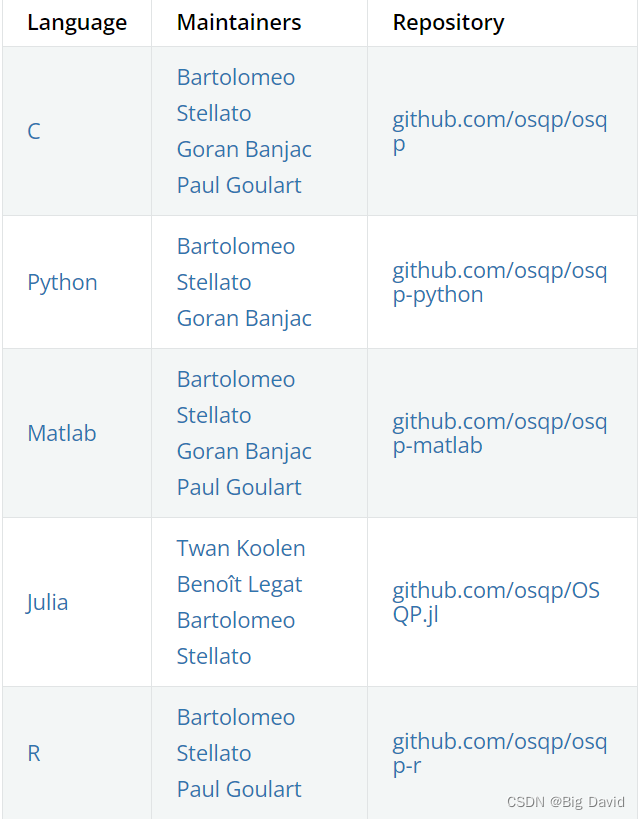
C:github.com/osqp/osqp
C++:github.com/robotology/osqp-eigen
5 Examples
Demo:
① Setup and solve :设置和求解

C:
#include <stdlib.h>
#include "osqp.h"int main(int argc, char **argv) {/* Load problem data */OSQPFloat P_x[3] = {4.0, 1.0, 2.0, };OSQPInt P_nnz = 3;OSQPInt P_i[3] = {0, 0, 1, };OSQPInt P_p[3] = {0, 1, 3, };OSQPFloat q[2] = {1.0, 1.0, };OSQPFloat A_x[4] = {1.0, 1.0, 1.0, 1.0, };OSQPInt A_nnz = 4;OSQPInt A_i[4] = {0, 1, 0, 2, };OSQPInt A_p[3] = {0, 2, 4, };OSQPFloat l[3] = {1.0, 0.0, 0.0, };OSQPFloat u[3] = {1.0, 0.7, 0.7, };OSQPInt n = 2;OSQPInt m = 3;/* Exitflag */OSQPInt exitflag = 0;/* Solver, settings, matrices */OSQPSolver *solver;OSQPSettings *settings;OSQPCscMatrix* P = malloc(sizeof(OSQPCscMatrix));OSQPCscMatrix* A = malloc(sizeof(OSQPCscMatrix));/* Populate matrices */csc_set_data(A, m, n, A_nnz, A_x, A_i, A_p);csc_set_data(P, n, n, P_nnz, P_x, P_i, P_p);/* Set default settings */settings = (OSQPSettings *)malloc(sizeof(OSQPSettings));if (settings) {osqp_set_default_settings(settings);settings->alpha = 1.0; /* Change alpha parameter */}/* Setup solver */exitflag = osqp_setup(&solver, P, q, A, l, u, m, n, settings);/* Solve problem */if (!exitflag) exitflag = osqp_solve(solver);/* Cleanup */osqp_cleanup(solver);if (A) free(A);if (P) free(P);if (settings) free(settings);return (int)exitflag;
};
② Update vectors:更新向量

#include <stdlib.h>
#include "osqp.h"int main(int argc, char **argv) {/* Load problem data */OSQPFloat P_x[3] = {4.0, 1.0, 2.0, };OSQPInt P_nnz = 3;OSQPInt P_i[3] = {0, 0, 1, };OSQPInt P_p[3] = {0, 1, 3, };OSQPFloat q[2] = {1.0, 1.0, };OSQPFloat q_new[2] = {2.0, 3.0, };OSQPFloat A_x[4] = {1.0, 1.0, 1.0, 1.0, };OSQPInt A_nnz = 4;OSQPInt A_i[4] = {0, 1, 0, 2, };OSQPInt A_p[3] = {0, 2, 4, };OSQPFloat l[3] = {1.0, 0.0, 0.0, };OSQPFloat l_new[3] = {2.0, -1.0, -1.0, };OSQPFloat u[3] = {1.0, 0.7, 0.7, };OSQPFloat u_new[3] = {2.0, 2.5, 2.5, };OSQPInt n = 2;OSQPInt m = 3;/* Exitflag */OSQPInt exitflag = 0;/* Solver, settings, matrices */OSQPSolver *solver;OSQPSettings *settings;OSQPCscMatrix* P = malloc(sizeof(OSQPCscMatrix));OSQPCscMatrix* A = malloc(sizeof(OSQPCscMatrix));/* Populate matrices */csc_set_data(A, m, n, A_nnz, A_x, A_i, A_p);csc_set_data(P, n, n, P_nnz, P_x, P_i, P_p);/* Set default settings */settings = (OSQPSettings *)malloc(sizeof(OSQPSettings));if (settings) osqp_set_default_settings(settings);/* Setup solver */exitflag = osqp_setup(&solver, P, q, A, l, u, m, n, settings);/* Solve problem */if (!exitflag) exitflag = osqp_solve(solver);/* Update problem */if (!exitflag) exitflag = osqp_update_data_vec(solver, q_new, l_new, u_new);/* Solve updated problem */if (!exitflag) exitflag = osqp_solve(work);/* Cleanup */osqp_cleanup(solver);if (A) free(A);if (P) free(P);if (settings) free(settings);return (int)exitflag;
};
③ Update matrices:更新矩阵P和A

#include <stdlib.h>
#include "osqp.h"int main(int argc, char **argv) {/* Load problem data */OSQPFloat P_x[3] = {4.0, 1.0, 2.0, };OSQPFloat P_x_new[3] = {5.0, 1.5, 1.0, };OSQPInt P_nnz = 3;OSQPInt P_i[3] = {0, 0, 1, };OSQPInt P_p[3] = {0, 1, 3, };OSQPFloat q[2] = {1.0, 1.0, };OSQPFloat q_new[2] = {2.0, 3.0, };OSQPFloat A_x[4] = {1.0, 1.0, 1.0, 1.0, };OSQPFloat A_x_new[4] = {1.2, 1.5, 1.1, 0.8, };OSQPInt A_nnz = 4;OSQPInt A_i[4] = {0, 1, 0, 2, };OSQPInt A_p[3] = {0, 2, 4, };OSQPFloat l[3] = {1.0, 0.0, 0.0, };OSQPFloat l_new[3] = {2.0, -1.0, -1.0, };OSQPFloat u[3] = {1.0, 0.7, 0.7, };OSQPFloat u_new[3] = {2.0, 2.5, 2.5, };OSQPInt n = 2;OSQPInt m = 3;/* Exitflag */OSQPInt exitflag = 0;/* Solver, settings, matrices */OSQPSolver *solver;OSQPSettings *settings;OSQPCscMatrix* P = malloc(sizeof(OSQPCscMatrix));OSQPCscMatrix* A = malloc(sizeof(OSQPCscMatrix));/* Populate matrices */csc_set_data(A, m, n, A_nnz, A_x, A_i, A_p);csc_set_data(P, n, n, P_nnz, P_x, P_i, P_p);/* Set default settings */settings = (OSQPSettings *)malloc(sizeof(OSQPSettings));if (settings) osqp_set_default_settings(settings);/* Setup solver */exitflag = osqp_setup(&solver, P, q, A, l, u, m, n, settings);/* Solve problem */if (!exitflag) exitflag = osqp_solve(solver);/* Update problemNB: Update only upper triangular part of P*/if (!exitflag) exitflag = osqp_update_data_mat(solver,P_x_new, OSQP_NULL, 3,A_x_new, OSQP_NULL, 4);/* Solve updated problem */if (!exitflag) exitflag = osqp_solve(work);/* Cleanup */osqp_cleanup(solver);if (A) free(A);if (P) free(P);if (settings) free(settings);return (int)exitflag;
};
应用:
① Huber fitting
② Lasso
③ Least-squares:最小二乘法
④ Model predictive control (MPC)
我们考虑将线性时不变动力系统控制到某个参考状态的问题。 为了实现这一点,我们使用约束线性二次 MPC,它在每个时间步长求解以下有限视界最优控制问题 x r ∈ R n x x_r∈R^{n_x} xr∈Rnx

⑤ Portfolio optimization
⑥ Support vector machine (SVM):支持向量机
这篇关于OSQP文档学习的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



