本文主要是介绍Dynamo处理点云数据,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Hello大家好!我是九哥~
随着三维激光点云扫描技术的推广,越来越多的项目中应用到了三维激光点云扫描。基于三维点云数字化模型,在建筑工程项目设计、施工和改造等过程中,能够完成实测实量、偏差检测、变形监测、模型对比、场地构建、地形测绘、文物保护等方面的应用,实现真实、高精度的数据源残疾,基于此数据源形成的数字化虚拟模型,辅助项目团队实现更多的定性、定量和实景分析。
可是呢,Revit本身对于点云模型的支持还是很不友好的,就像DWG文件一样,链接进来以后,可发挥的空间就很小了。
基于此呢,今天来给大家分享一个好玩且强大的节点包——【Sastrugi】,这个包可以辅助我们在Dynamo中来处理点云数据。
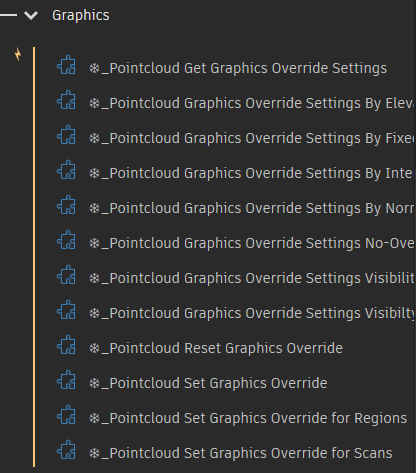
包里面有很多节点,我们本次主要演示Pointcloud分组下的节点,分为Geometry和Graphics两组,先来总体看下:
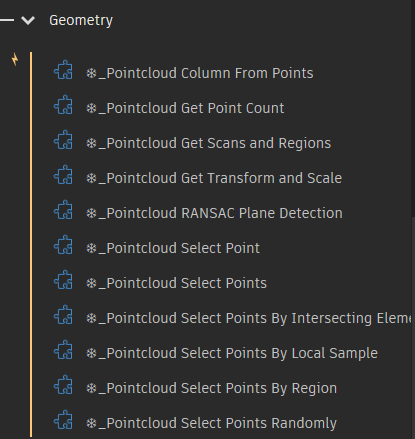
接下来呢,咱们就挑一些节点,简单介绍下能干什么:
❉_Pointcloud Select Points By Local Sample
该节点允许用户通过在Active View中选择Pointcloud上的一个位置来选择特定数量的点云中的点,创建一个本地样本区域来提取点。
❉_Pointcloud Select Points By Intersecting Element
该节点使用相交元素作为过滤器,从Pointcloud Instance中获取随机点的样本。

❉_Pointcloud Get Point Count
此节点为所选的点云提取链接的Recap Project文件内的点数。

❉_Pointcloud Set Graphics Override for Scans
设置点云的颜色替换
❉_Pointcloud Select Points in View
本节点可以在不同的视图中,根据视图类型选择点云中的点:
在平面视图中选择
在选择的视图中选择点云
在详图视图中选择点云

在3D视图中选择点云

在激活的视图中选择点云
最后画个重点,介绍两个Sastrugi包中的重磅节点:
❉_Pointcloud Column From Points
该节点通过评估输入点的布局来计算柱的形状和参数。
这里还有改进的空间,但是这个节点向我们证明点云翻模是有可行性的~

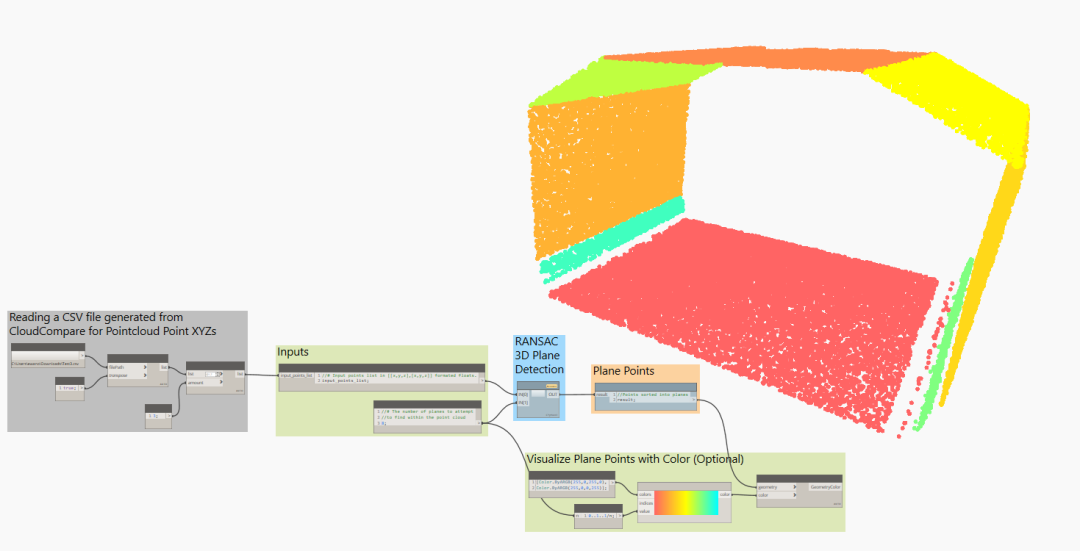
❉_Pointcloud RANSAC Plane Detection
这个节点比较特殊,需要Dynamo2.10+版本的才行,因为用到了Cpython和外部的python包。
这个节点接受点云点的输入XYZ列表,并根据RASAC算法将它们分组,以便在点云中定义特定的平面。在定义楼板、天花、墙、柱等时,这很方便。
好了,今天的分享就到这里了,小伙伴们快去尝试吧~
这篇关于Dynamo处理点云数据的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






