本文主要是介绍嵌入式培训机构四个月实训课程笔记(完整版)-Linux ARM驱动编程第三天-ARM Linux ADC和触摸屏开发 (物联技术666),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
链接:https://pan.baidu.com/s/1V0E9IHSoLbpiWJsncmFgdA?pwd=1688
提取码:1688
教学内容:
1、ADC
S3C2440的A/D转换器包含一个8通道的模拟输入转换器,可以将模拟输入信号转换成10位数字编码。
在A/D转换时钟频率为2.5MHz时,其最大转换率为500KSPS(5个时钟周期完成一次转换)
输入电压范围为0~3.3V。
AD转换接口中的AIN[7]-AIN[4]四个通道为触摸屏的模拟信号输入口,低4位通道为普通的AD通道。
外AD转换:A[3]-A[0]
1)、设置ADCCON寄存器
通过ECFLG[15]可以查询是否转换完成,PRSCEN[14]预分频使能,PRSCVL[13:6]:分频大小
SEL_MUX[5:3]:选择AD转换通道;STDBM[2]:0普通模式;READ_START[1]:1,读取完后,自动继续AD转换,0停止使能读取;ENABLE_START[0]:1,启动AD转换,启动后自动清零
2)、ADCTSC
全设为0
3)、ADCDLY
AD延时
4)、ADCDATn
ADCDAT0[9:0]:AD转换的数据;ADCDAT0[15:12]:触摸屏AD相关,可以不设。
2、触摸屏AD转换:AIN[7]-AIN[4]
1)、设置ADCCON(和普通相关),
2)、设置ADCTSC

UD_SEN---抬起按下中断设置(0:检查点击触摸屏,1:检查弹起触摸屏)
0:使能按下中断; 1:使能台起中断
YM_SEN---选择YMON的输出值
0:输出0(YM=高阻); 1: 输出1(YM=GND)
YP_SEN---选择nYPON的输出值
0:输出0(YP=外部电压); 1:输出1(YP连接AIN[5])
XM_SEN---选择XMON的输出值
0:输出0( XM=高阻); 1: 输出1(XM=GND)
XP_SEN---选择nXPON的输出值
0:输出0(XP=外部电压);1:输出1(XP连接AIN[7])
PULL_UP---上拉切换使能(等待中断才上拉,其他1)
0:XP上拉使能; 1: XP上拉禁止
AUTO_PST---自动连续转换X轴和Y轴坐标模式选择(连续是测量X之后会继续测量Y)
0:普通A/D转换; 1:连续X/Y轴转换模式
XY_PST---手动测量X轴和Y轴坐标模式选择
00:无操作模式; 01:对X坐标测量;
10:对Y坐标测量; 11:等待中断模式
等待中断模式:
YMON=1; nYPON=1;XMON=0;nXPON=1
YM=接地
YP=AIN[5]
XM=高阻
XP=AIN[7](上拉)

YM_SEN=1,YP_SEN=1,XM_SEN=0,XP_SEN=1;PULL_UP=0;XY_PST=11
测量X坐标:
YMON=0; nYPON=1;XMON=1;nXPON=0;
YM=高阻
YP=AIN[5]
XM=接地
XP=上拉

YM_SEN=0,YP_SEN=1,XM_SEN=1,XP_SEN=0;PULL_UP=1;XY_PST=01
测量Y坐标:
YMON=1; nYPON=0;XMON=0;nXPON=1;
YM=接地
YP=上拉
XM=高阻
XP=AIN[7]

YM_SEN=1,YP_SEN=0,XM_SEN=0,XP_SEN=1;PULL_UP=1;XY_PST=10
//*************触摸中断服务程序**********************************
void __irq Adc_or_TsSep(void)
{
unsigned int valx, valy;
int i;
rSUBSRCPND |= BIT_SUB_TC; //清零
ClearPending(BIT_ADC); //清零
if(rADCDAT0&0x8000)//stylus up
{
Uart_Printf("\nStylus Up!!\n");
rADCTSC &= ~(0x01<<8); // Set stylus down interrupt
}
else
{
Uart_Printf("\nStylus Down!!\n");
// 采集X轴
rADCTSC=(0<<8)|(0<<7)|(1<<6)|(1<<5)|(0<<4)|(1<<3)|(0<<2)|(1);
valx = 0;
for(i=0;i<5;i++)
{
rADCCON|=0x1;
while(rADCCON & 0x1); //启动
while(!(0x8000&rADCCON)); //等待结束
valx += (0x3ff&rADCDAT0); //取值
}
valx /= 5;
// 采集Y轴
rADCTSC=(0<<8)|(1<<7)|(0<<6)|(0<<5)|(1<<4)|(1<<3)|(0<<2)|(2);
valy = 0;
for(i=0;i<5;i++)
{
rADCCON|=0x1;
while(rADCCON & 0x1);
while(!(0x8000&rADCCON));
valy += (0x3ff&rADCDAT1);
}
valy /= 5;
// 计算X和Y坐标
ResultX = TOUCH_WIDTH * ( TOUCH_DEFAULT_RB -valx) / (TOUCH_DEFAULT_RB - TOUCH_DEFAULT_LB);
ResultY = TOUCH_HEIGHT * (valy - TOUCH_DEFAULT_TB) / (TOUCH_DEFAULT_BB - TOUCH_DEFAULT_TB);
// 恢复到等待台起中断模式
rADCTSC=(1<<8)|(1<<7)|(1<<6)|(0<<5)|(1<<4)|(0<<3)|(0<<2)|(3);
}
}
//*********************************************
在初始化中设置成,按下中断等待模式,清中断,判断是抬起中断还是按下中断,按下中断中设置ADCTSC为采集x坐标值,(这里不需要设置ADCCON3-5位了,CPU自动设置了 ),按下采集结束后把中断模式改为抬起等待中断模式。
3、SPI总线
SPI(Serial Peripheral Interface),串行外围设备接口。是由Motorola公司开发,用来在微控制器和外围设备芯片之间提供一个低成本、易使用的全双工同步串行总线。
SPI接口由SDI(串行数据输入),SDO(串行数据输出),SCK(串行移位时钟),CS(从使能信号)四种信号线构成。
S3C2440 SPI控制器及寄存器:2个SPI,每个都有6个专用寄存器,共12个寄存器
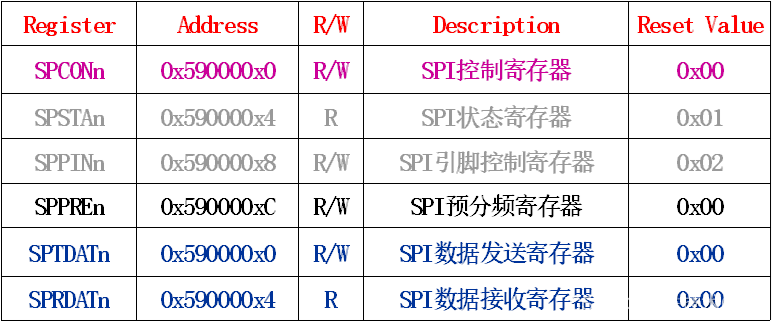
SPCON:模式控制选择(8位)
SPSTA:状态,注意0位,1:检测收发就绪(8位)
SPPRE:预分频(8位)
SPTDAT:发送寄存器SPTDAT0,SPTDAT1二个(8位)
SPRDAT:接收寄存器SPRDAT0,SPRDAT1二个(8位)
这篇关于嵌入式培训机构四个月实训课程笔记(完整版)-Linux ARM驱动编程第三天-ARM Linux ADC和触摸屏开发 (物联技术666)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








