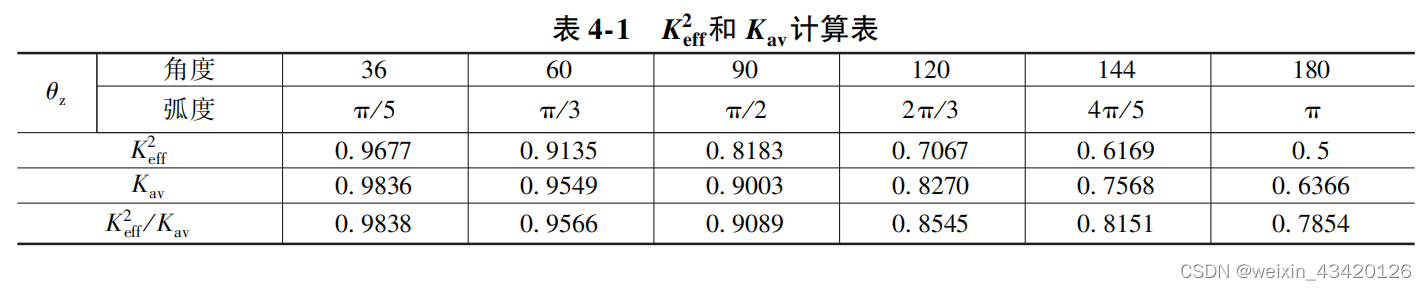
本文主要是介绍不同状态角 θz 下的 K2eff 和 Kav 计算结果,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
不同状态角 θ z 下的 K 2 eff 和 K av 计算结果
clear
clc
close all
syms theta
for theta_z=[pi/5,pi/3,pi/2,2*pi/3,4*pi/5,pi] %
theta_zd=theta_z*180/pi
theta_1=-theta_z/2;
theta_2=theta_z/2;
ftheta=cos(theta);
ftheta2=cos(theta)^2;
Keff2=int(ftheta2,theta_1,theta_2)/theta_z;
K_eff2=vpa(Keff2,4) %化简为小数显示
Kav=int(ftheta,theta_1,theta_2)/theta_z;
K_av=vpa(Kav,4) %化简为小数显示
Keff2Kav=Keff2/Kav;
Keff2_Kav=vpa(Keff2Kav,4)end
这篇关于不同状态角 θz 下的 K2eff 和 Kav 计算结果的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




