本文主要是介绍汽车LiDAR的“先行者”——机械式LiDAR,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
转自:http://www.mems.me/mems/system_integrator_201711/5547.html
http://www.mems.me/mems/system_integrator_201711/5636.html
机械式LiDAR拉开自动驾驶的序幕
2012年5月,谷歌(Google)自动驾驶汽车正式获得了美国内华达州车辆管理局(DMV)颁发的执照,这是美国历史上为自动驾驶汽车颁发的第一张执照。同样重要的是,激光雷达(LiDAR)也首次正式在自动驾驶汽车上露脸。

谷歌自动驾驶汽车
这个被放置在车顶上被戏谑为“全家桶”的装置其实就是汽车的“眼眸”——LiDAR。这个“全家桶”不仅尺寸醒目,价格也是让人瞠目——7万美元。这就是LiDAR最初也是迄今为止最为成熟的量产形态——机械式LiDAR。
LiDAR的主要构成要素可概括为发射系统、接收系统和信号处理系统。LiDAR系统的核心组件主要有激光器、扫描器及光学组件、光电探测器及接收IC,以及位置和导航器件等。
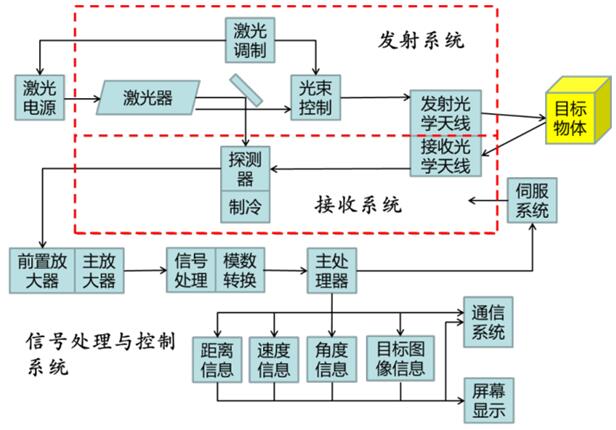
LiDAR的主要构成要素
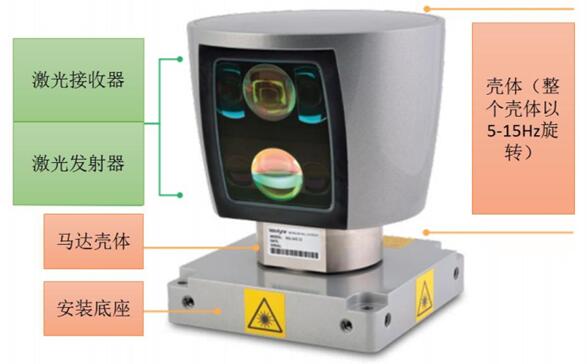
所谓机械式LiDAR,是指其发射系统和接收系统存在宏观意义上的转动,也就是通过不断旋转发射头,将速度更快、发射更准的激光从“线”变成“面”,并在竖直方向上排布多束激光(即32线或64线雷达),形成多个面,达到动态3D扫描并动态接收信息的目的。以“全家桶”为例,也就是由Velodyne生产的第一代机械式LiDAR(HDL-64E),竖直排列的激光发射器呈不同角度向外发射,实现垂直角度的覆盖,同时在高速旋转的马达壳体带动下,实现水平角度360度的全覆盖。因此,我们可以看到“全家桶”在汽车行驶过程中,就一直处于360度旋转状态中。
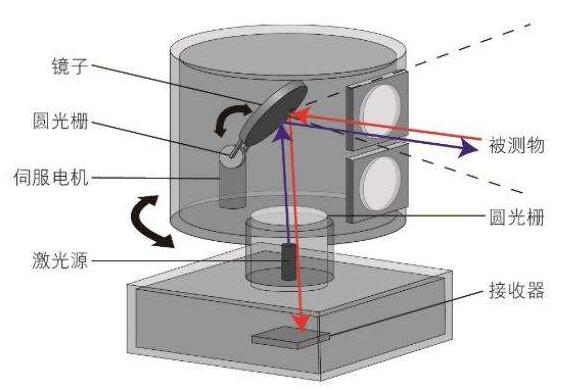
机械式LiDAR主要构成要素
Velodyne生产的第一代机械式LiDAR(HDL-64E)结构示意图
瑜不掩瑕,机械式LiDAR难逃“先烈”的命运
机械式LiDAR作为在自动驾驶车辆上最先应用的激光雷达产品,具有以下优点:
1. 扫描速度快:扫描速度只决于发射模块的电子学响应速度,不受材料的特性影响,可以实现比光学相控阵更高的扫描频率。
2. 接收视场小:这种扫描技术是一种发射和接收同步扫描技术,接收视场小,抗光干扰能力强,信噪比高。
3. 可承受高的激光功率:这种扫描技术完全是在自由空间中进行,可以采用高峰值功率的激光脉冲进行高信噪比的探测。
但是机械式LiDAR因为运动部件较多,除了价格高居不下以外,还存在较多不足之处。特别是用于自动驾驶汽车,存在如下缺点:
1. 结构笨重,马达和多面体棱镜的重量和体积较大,容易造成机械磨损,不利于长时间运转使用。可靠性随着时间逐渐降低,对于以“安全性”为首位的自动驾驶汽车来讲,这是无法接受的致命缺陷。
2. 光通过每一个多棱镜的表面时,都会经历一段较短的不能接受光信号的时间,降低反射信号接收比,使得信号接收比大幅降低。
3. 装调工作量大:需要将发射和接收模块进行精密光学对准装配,工作繁复,工作量大,大批量生产难度大。

应用在(半)自动驾驶车辆的不同解决方案对比(来源:Quanergy公司)
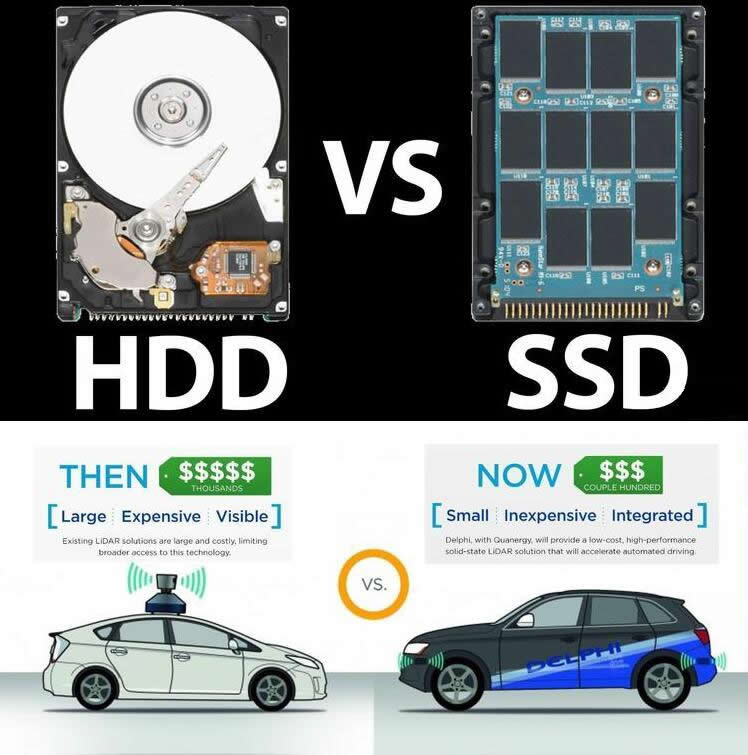
机械式LiDAR vs. 固态LiDAR
未来,LiDAR在自动驾驶领域,体积、价格、安全性、量产能力都是综合考量的因素。从目前激光雷达的业界声音来看,机械式LiDAR仅仅是过渡产品,未来应该是混合固态LiDAR和全固态LiDAR的天下。瑜不掩瑕,机械式LiDAR最终难逃“先烈”的命运! 下面,让我们一起看看LiDAR企业的发展布局吧。
细数机械式LiDAR企业,窥见未来LiDAR技术方向
1. Velodyne
Velodyne公司的机械旋转式产品在车载激光雷达领域占据统治地位,后续推出混合固态的产品,成本有所降低,正在逐步研发全固态激光雷达。Velodyne公司获得百度与福特1.5亿美元的投资,计划到2020年左右成本降至500美金。
从技术方向看,Velodyne公司后续产品在俯仰方向(垂直于水平面方向)均采用了电子扫描技术,在方位方向(水平方向)采用机械360度旋转扫描。技术路线已经从机械式LiDAR逐步转向混合固态LiDAR,但全固态LiDAR的产品暂时还没看到。
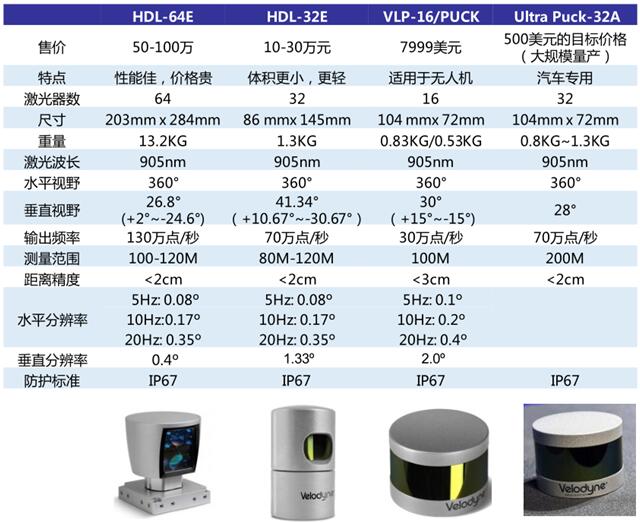
Velodyne公司现有产品及主要参数
2. Quanergy
Quanergy公司的产品系列主要包括三款LiDAR:M8、S3和S3-Qi,以及利用LiDAR开发的新一代安防解决方案Q-Guard。M8是Quanergy推出的第一代LiDAR,采用8个2D线性激光扫描器,属于机械式LiDAR。随后,相继发布的产品都开始走固态LiDAR路线。S3号称是全球首款全固态LiDAR,采用了光学相控阵技术,不含任何旋转活动部件,实现了LiDAR的小型化,并提高了可靠性,规模量产后有望将传感器的价格降低至250美元以下;S3-Qi则是一款微型固态LiDAR,标准封装尺寸仅为1 x 1.5英寸,重量约100克,具有较低的功耗,S3-Qi可广泛应用于无人机、智能机器人、安防、智能家居及工业自动化应用。
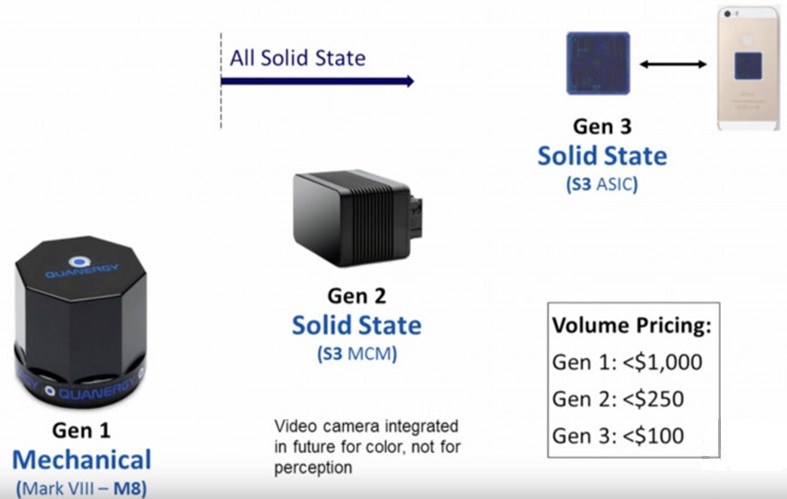
Quanergy公司的LiDAR技术路线图
3. ibeo
从最早Ibeo Motiv的360度整体旋转,到跟车厂结合,固定光源和接收器,只是有一个转镜的LUX和ScaLa。2010年德国激光雷达供应商 Ibeo与法国汽车零部件供应商法雷奥合作开发并量产的ScaLa,作为一款高精度机械式LiDAR,其最大检测距离为150米。2016年采埃孚收购了Ibeo公司的40%股份,帮助Ibeo公司研发固态LiDAR和更高效的数据标定。
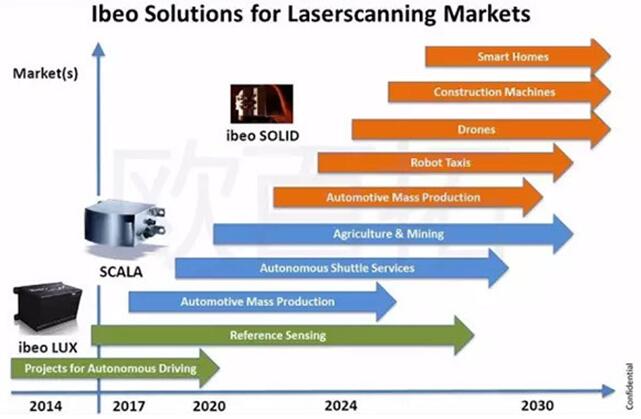
ibeo公司的激光扫描市场的技术路线图,预计在2022年推出成熟的固态LiDAR
从以上国外几家主要LiDAR企业的产品路线来看,不难看出,大家发力点都瞄准在固态LiDAR,毕竟小型化、低成本、可靠性高是未来自动驾驶领域LiDAR的趋势。除了这几家在LiDAR技术沉淀已久的公司以外,还有不少初创企业和传感器领军企业都欲直接切入混合固态LiDAR和全固态LiDAR,如中国的光珀智能。那么混合固态LiDAR和全固态LiDAR的技术和市场前景如何,请继续关注麦姆斯咨询的后续报道。同时也欢迎参加由麦姆斯咨询主办的『“微言大义”研讨会:激光雷达技术及应用』——时间:2017年12月22日,地点:深圳会展中心!
这篇关于汽车LiDAR的“先行者”——机械式LiDAR的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








