本文主要是介绍Docker 镜像优化工具,轻松完成构件瘦身 | 开源日报 No.158,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!

wagoodman/dive
Stars: 41.7k License: MIT
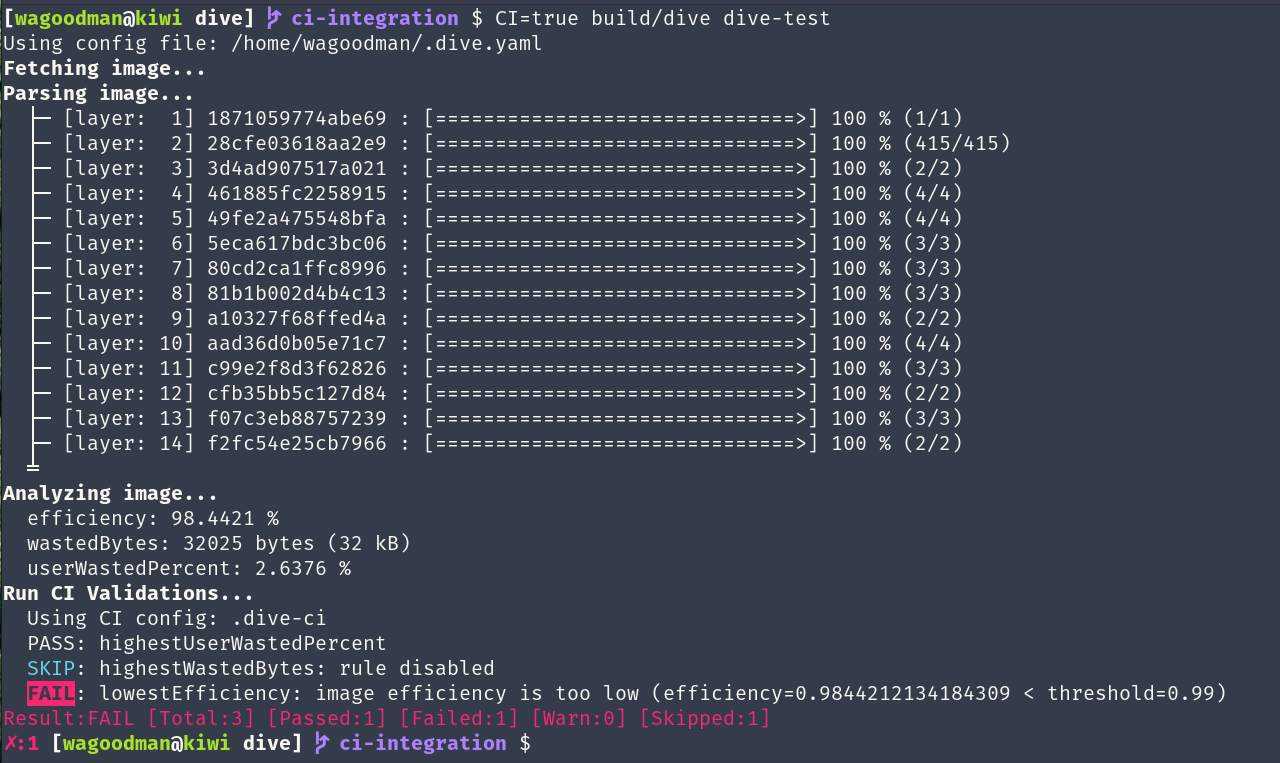
dive 是一个用于探索 Docker 镜像、层内容,并发现如何缩小 Docker/OCI 镜像大小的工具。
- 显示按层分解的 Docker 镜像内容
- 指示每个层中发生了什么变化
- 估算“镜像效率”
- 快速构建/分析周期
- CI 集成
- 支持多种镜像来源和容器引擎安装方法,包括 Ubuntu/Debian、RHEL/Centos、Arch Linux 等,以及 Mac 和 Windows 平台。同时也支持通过 Go 工具进行安装。
ethen8181/machine-learning
Stars: 3.0k License: MIT
machine-learning 是一个持续更新的开源项目,主要用 Python3 编写机器学习教程。
该项目解决了如何以 Jupyter Notebook 格式介绍机器学习内容的问题。
- 主要功能包括深度学习、模型部署、运筹研究、强化学习等多个方向的教程。
- 核心优势在于其内容旨在实现数学符号与 Python 科研栈(包括 numpy, numba, scipy, pandas, matplotlib 等)之间良好平衡,并使用诸如 scikit-learn,fasttext,huggingface 等开源库。
- 重点特性有对各种算法和技术进行详尽讲解,并提供大量实例代码。例如:深度神经网络(CNN)、循环神经网络(RNN)、长短期记忆网络 (LSTM) 以及 Word2vec 等。
facebookresearch/habitat-sim
Stars: 2.2k License: MIT

habitat-sim 是一个灵活、高性能的三维模拟器,用于体验式人工智能研究。
该项目的主要功能、关键特性和核心优势包括:
- 支持室内/室外空间的 3D 扫描
- 支持 CAD 模型和分段刚体对象
- 可配置传感器(RGB-D 相机、自我运动感知)
- 通过 URDF 描述机器人
- 刚体力学(通过 Bullet 实现)
该项目旨在提供快速模拟速度,并通常与 Habitat-Lab 一起使用,后者是一个端到端实验库,用于进行体验式人工智能任务。
QwenLM/Qwen
Stars: 8.2k License: Apache-2.0

Qwen 是由阿里云提出的聊天和预训练大型语言模型的官方存储库。
该项目主要功能、关键特性、核心优势包括:
- 提供了强大的基础语言模型,覆盖多个领域和语言(重点是中文和英文),在基准数据集上表现出竞争力
- 提供了与人类偏好对齐的聊天模型,能够进行对话、创作内容、提取信息等,并且能够使用工具或扮演代理人角色
- 支持不同规模的预训练模型,并提供量化版本以及推理性能统计等详细信息
- 提供了快速入门指南、微调教程以及部署说明等相关资源
- 在一系列基准数据集上,Qwen 模型在自然语言理解、数学问题求解等任务上表现优异,超过了类似规模基线模型。
openobserve/openobserve
Stars: 7.8k License: AGPL-3.0
https://osguider.oss-cn-guangzhou.aliyuncs.com/subject/ceb50cca07ac7f6db977bbe06063f83a.webp
openobserve 是一个云原生的可观测性平台,专门用于日志、指标、跟踪、分析和实时用户监控(RUM),设计用于 PB 级别的规模。
该项目主要功能、关键特性和核心优势包括:
- 提供全面支持各种数据类型的日志、指标和跟踪
- 完全兼容 OTLP 以支持开放遥测
- 包括性能追踪、错误记录和会话重播等真实用户监控功能
- 具备超过 14 种不同图表类型进行综合数据可视化的警报与仪表板功能
- 支持高级摄取与查询函数,如丰富化处理,剔除敏感信息,并提供 SQL 和 PromQL 查询支持等
此外还有易安装运行单一二进制文件;多样存储选项;高可用集群;动态架构适应数据结构变更;内置认证机制及多语言界面支持。
OpenDriveLab/UniAD
Stars: 1.9k License: Apache-2.0
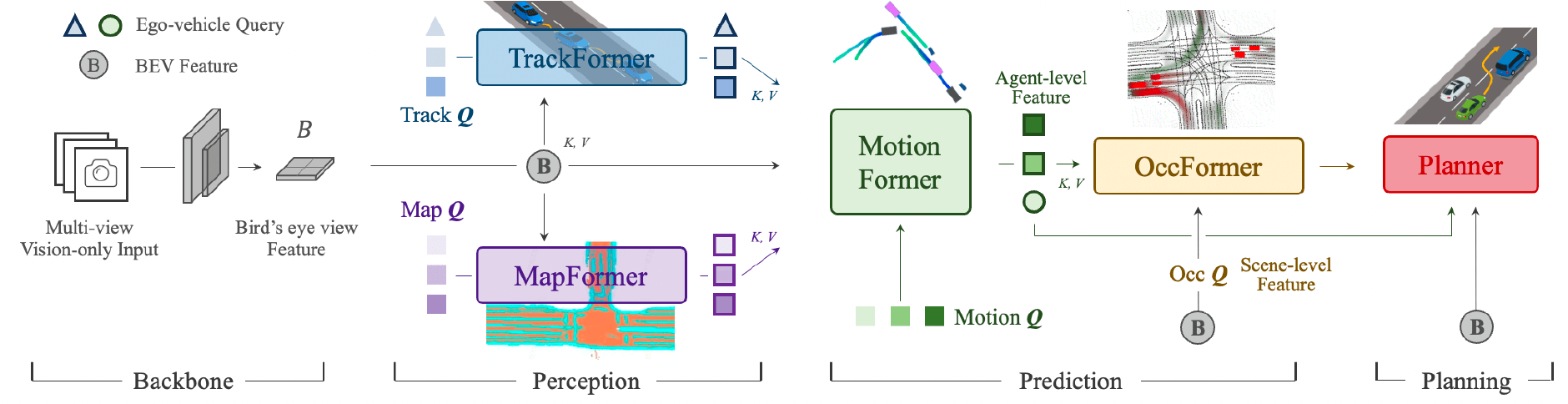
Planning-oriented Autonomous Driving 是一个统一的自动驾驶算法框架,遵循规划导向的理念。与独立模块化设计和多任务学习不同,该项目将感知、预测和规划等一系列任务按层次进行组织。
以下是该项目的核心优势:
- 规划导向哲学:UniAD 遵循了以规划为中心的思想,在自动驾驶领域提供了一个统一且高效的解决方案。
- 最先进性能:UniAD 在所有任务上都取得了最先进水平 (运动:0.71m minADE,占用率:63.4% IoU,规划:0.31% avg.Col)。
关键特性包括:
- 统一框架:通过整合各个子系统,并采用分级方式处理感知、预测和规划等多项任务。
- SOTA 性能表现:在每个阶段内部实现业界领先水平,并尤其擅长于预测和路径规则两大主要功能。
这篇关于Docker 镜像优化工具,轻松完成构件瘦身 | 开源日报 No.158的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






