本文主要是介绍【Opencv】OSD反色处理,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
通过上一篇博文【海思】利用opencv给海思抓拍图像加OSD,现在已经可以在摄像头抓拍照片的基础上进行OSD叠加了,同时也实现了背景色透明的OSD叠加。基于上一篇结尾留出的小问题,今天利用Opencv实现了叠加字体的反色,从而使得OSD在图片中更为突出。
具体思路如下:
1、获取OSD中每个字符将要叠加到原图的区域
2、根据区域获取原图在此区域的平均灰度值
3、若平均灰度值大于某一值(即偏白色),则将OSD位图相应区域重画为黑色,否则(偏黑色)不做处理,因为生成的字符串是本来就是白色的。
我封装了一个函数,专门处理反色操作,代码如下
//base_image : 原图
//osd_image : OSD图
//region_start_h: OSD水平初始坐标
//region_start_v: OSD垂直初始坐标
//FONT_SIZE : 字体大小
static void invertColors(Mat &base_image,Mat &osd_image,int region_start_h,int region_start_v)
{int i,j,k;Mat mean,stddev;for(i = 0;i < osd_image.cols / (FONT_SIZE / 2); i++){//获取字符区域的平均灰度值meanStdDev(base_image(Rect(region_start_h + i*FONT_SIZE/2,region_start_v,FONT_SIZE,FONT_SIZE/2)),mean,stddev);printf("avg %d = %d\n",i+1,int(mean.at<double>(0,0)));//如果大于140,则该区域偏白,需要把字变黑if(int(mean.at<double>(0,0)) > 140){//变黑,像素操作for(j = i*20; j < i*20 + FONT_SIZE / 2; j++){for(k = 0;k < FONT_SIZE;k++){if(osd_image.at<Vec3b>(k,j)[0] != 0&& osd_image.at<Vec3b>(k,j)[1] != 0&& osd_image.at<Vec3b>(k,j)[2] != 0){osd_image.at<Vec3b>(k,j)[0] = 10;osd_image.at<Vec3b>(k,j)[1] = 10;osd_image.at<Vec3b>(k,j)[2] = 10;}}}}}mean.release();stddev.release();
}
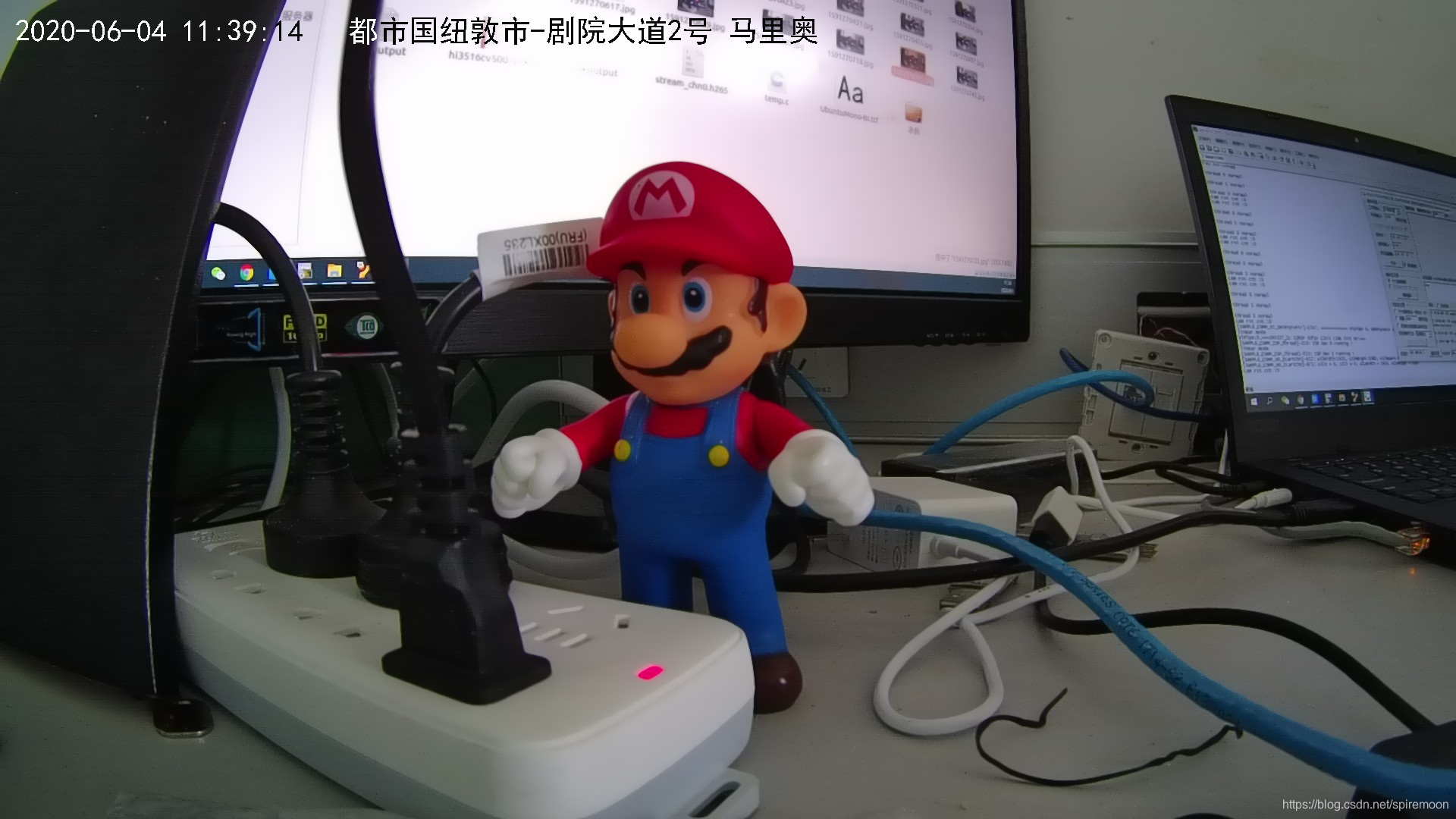
搭建“苛刻”的拍照背景,以使验证效果更明显,拍得并处理后的照片如下,与预期相符。请忽略我那凌乱不堪而又“破旧”的小工位 =。=
这篇关于【Opencv】OSD反色处理的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







