本文主要是介绍高性能开源伺服器ODRIVE,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
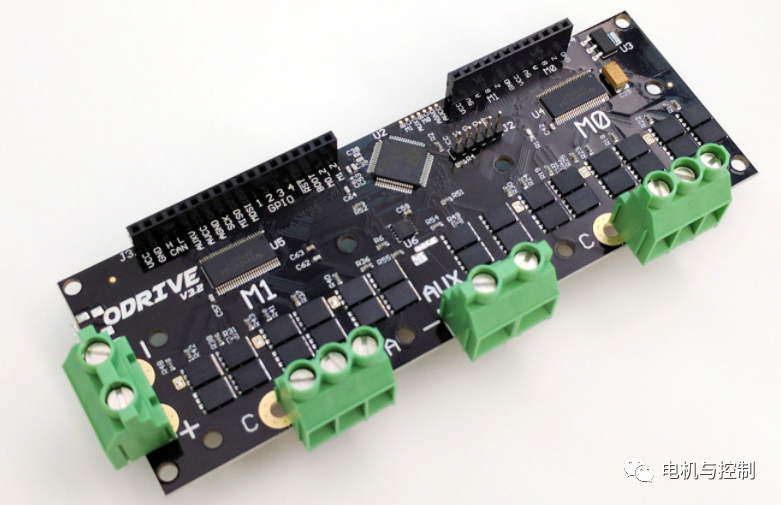
ODrive是一个基于STM32的高性能FOC伺服驱动器,其可以同时驱动两个无刷电机,早期被大量使用与3D打印机或自制CNC车床电气系统的设计中,知名极客James Bruton使用其作为大部分自己制作机器人伺服驱动的核心单元,之前Stanford开源的8自由度四足机器人Doggo同样也采用了Odrive作为核心的驱动器。
步进电机在爱好机器人项目中无处不在:如果您今天制作机器人或自动化项目,您很可能会使用它们。几乎所有从3D打印机和CNC铣床到机器人或汽车的项目都使用它们。然而,在工业自动化领域,无刷伺服电机已经广泛应用了,它们不会失步,更大功率,更高效,更安静。
然而,无刷电动机并非昂贵的工业自动化设备所独有。事实上,你可以在业余爱好商店购买一些功能强大且价格低廉的电机。驱动这些电机的电子设备也很便宜。
ODrive可以同时驱动两个伺服电机,作者还编写了一套基于Python的配置、调试工具,用于设置驱动器参数,查看驱动器反馈等。同时硬件部分也开源了,可以自己发PCB,也可以淘宝买,600左右,就可以买到可以同时驱动两个伺服电机且单路电流60A以上的高性能伺服电机。要知道Elmo的驱动器,ODrive这种性能的,要一万块钱。所以ODrive是制作机器人的不二之选。

主要规格:
-
同时支持2个伺服电机,设计用于>120A峰值电流。
-
24V和48V两个版本
-
编码器反馈,用于任意精确的运动
-
支持两种刹车模式
-
制动电阻
-
再生制动
-
-
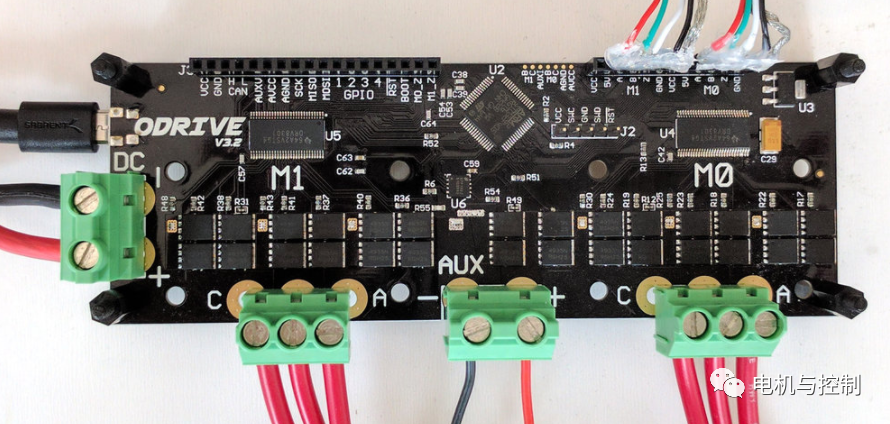
USB,CAN,UART,伺服PWM/PPM和步/dir接口
-
使用高功率密度锂电池意味着只需一个适中的电源。
接口
-
USB串口 - PC,RaspberryPi等
-
CAN
-
UART - Arduino,mBed等
-
PWM - RC接收器,Arduino等
-
步/方向 - 现有的运动控制器
-
一些通用数字和模拟引脚
协议
-
用于与现有自动化工具连接的G代码解析器
-
许多类型的命令模式
-转到(轨迹规划的位置控制)
-位置命令
-速度命令
-扭矩命令
Github的链接:
https://github.com/madcowswe/ODrive
主页:
https://odriverobotics.com/
关注公众号【电机与控制】,会有更多的电机控制源代码。
免责声明:本文部分内容来自网络,版权归原作者所有,如涉及作品版权问题,请与我联系删除。
如何配置C2000进入低功耗模式
使用CCS连接正在运行的C2000芯片
CCS奇怪现象如何解决
TMU介绍及使用方法
三相电机控制方式入门,看完这一篇就够了
TI eSMO 库 Fsmopos 和 Gsmopos 参数解析
增量式旋转编码器工作原理
这篇关于高性能开源伺服器ODRIVE的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!