本文主要是介绍CmakeList教程,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、CmakeList介绍:
cmake 是一个跨平台、开源的构建系统。它是一个集软件构建、测试、打包于一身的软件。它使用与平台和编译器独立的配置文件来对软件编译过程进行控制。它会通过写的语句自动生成一个MakeFile,从而实现高效编译
二、CmakeList的常用指令
1.指定 cmake 的最小版本(可选)
cmake_minimum_required(VERSION 2.8)
这条语句规定了执行这个cmake的版本不能低于2.8,否则会报错,要求升级cmake版本
2.设置项目名称(可选)
project(HELLO)
这个命令不是强制性的,但最好都加上。它会引入两个变量 HELLO_BINARY_DIR 和 HELLO_SOURCE_DIR,同时,cmake 自动定义了两个等价的变量 PROJECT_BINARY_DIR 和 PROJECT_SOURCE_DIR
3.添加生成的二进制文件
add_executable(name source…)
参数解释:
(1)name为需要生成的可执行文件名,也就是例如gcc demo.c -o demo,-o生成的demo就是这里的参数name,生成后就可以在可执行文件目录执行./demo运行
(2)第二个参数source为源文件,也就是.c或者.cpp文件,这个参数可以有多个,实现多个源文件一起编译
知道了上面三个指令,我们就可以写一个简单的CmakeList文件啦,先写一个小demo试试水~
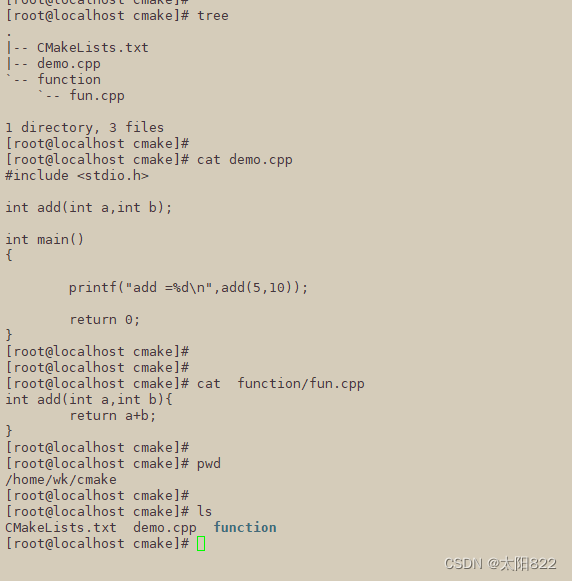
在当前目录下,有一个function的文件夹,里面存放着一个叫fun.cpp的文件,文件中有一个add的函数,实现的是对输入的两数相加并返回。function文件夹外面存放着CmakeList.txt与我们的主函数demo.cpp。
现在编写CmakeList.txt:
cmake_minimum_required(VERSION 2.8)
project(HELLO)
add_executable(hello ./demo.cpp function/fun.cpp)
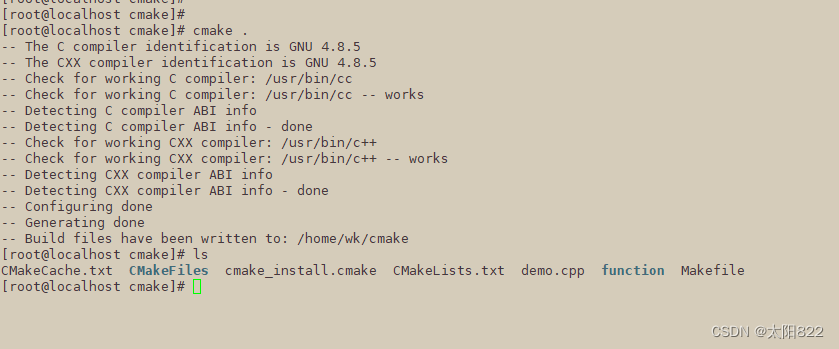
接着在CmakeList.txt所在的目录下执行
cmake .
就会生成几个文件以及文件夹,其中的MakeFile就是我们需要的
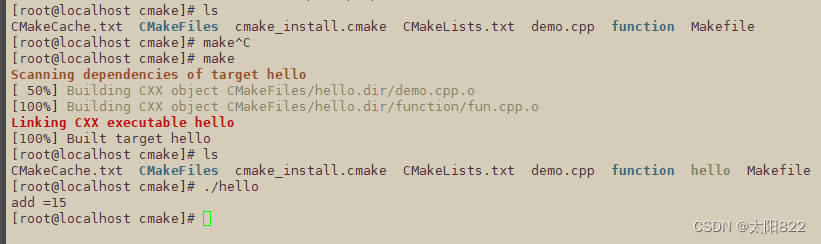
接着执行
make
就可以看到目录下出现了我们需要的可执行文件hello,运行./hello 可以看到成功打印出了结果15
4. 收集指定目录下的源码文件
很多时候我们构建一个二进制文件的时候,可能有几十或上百个.c或.cpp源码参与编译,如果我们在add_executable后一个个指定,效率非常低下,这时候就可以使用aux_source_directory
aux_source_directory(<dir> <variable>)
5.生成库文件
add_library(library_name [STATIC | SHARED | MODULE] EXCLUDE_FROM_ALL source_files)
library_name为要生成库的名称,例如生成一个名为libadd.so的动态库时,填add就行,lib与后面的.so会自动生成
STATIC表示生成静态库,SHARED表示生成动态库,MODULE表示生成一个模块,这是可选参数,但是最好根据需要生成的库类型都加上
使用 EXCLUDE_FROM_ALL 选项时,库目标将不会被自动构建,而是需要通过其他目标或手动指令进行显式构建。这个选项通常用于一些可选的或测试相关的库,它们不需要作为构建过程的一部分,但可以在需要时手动构建。这个也是可选参数
source_files为生成库的源文件
6. 指定连接库
这里有两种方式,第一种为link_directories与link_libraries搭配使用,还有一种是find_library与target_link_libraries搭配,更加推荐使用第二种,因为可读性更好,可以让我们更好的了解代码的依赖关系,并且可以确保在构建过程中只链接指定的库文件
第一种方式
link_directories(directory1 directory2 …)
添加库的查找路径
其中directory1、directory2等是你要添加的附加库文件目录。
需要注意的是link_directories默认路径在当前目录下,也就是说如果不提供绝对路径的话,只能在当前目录的子目录下找
link_libraries(library1 library2 …)
设置需要链接的文件
其中,library1、library2等参数是要链接的库文件名。
link_libraries可以把库链接到后续所有的目标中,库名以libpthread为例,可以写libpthread.so、pthread,都可以识别
第二种方式(推荐使用)
find_library(LIBRARY_PATH mylibrar PATHS /path/to/library/directory1 /path/to/library/directory2)
LIBRARY_PATH为一个变量,find_library会把找到的库存到这个变量中。可以供下面target_link_libraries使用
mylibrar为需要查找的库名称
PATHS为开始的字段不是必须的,它可以指定除当前目录下的其他路径,后面跟的都是需要查找的路径
target_link_libraries(target [item1] [item2] …)
其中 <target> 是要链接库文件的目标(例如可执行文件、静态库等),[item1]、[item2] 等是要链接到目标的库文件或目标。
item1的设置方式:
- 可以是写死的库,例如库名为libadd.so,可以写成target_link_libraries(demo add)
- 使用set设置变量的方式,set(LIBRARY_PATH /path/to/library),item1使用${LIBRARY_PATH}代替
- add_library(my_library STATIC my_library.cpp) 这种方式会生成一个新的库供使用
- 使用find_library设置的变量来链接
7.添加编译宏
很多时候我们的代码中存在类似#ifdef XXX 这样的编译宏,可以决定代码编译出不同功能或架构的代码,例如gcc编译时为gcc demo.c -DDEBUG,这时候如果代码中存在DEBUG这样的宏,就会编译被ARM宏包着的那段代码,设置宏与库一样,也有两种方式
第一种:add_definitions
add_definitions(-DXXX)
-D为必须的,XXX为需要设置的宏,这样设置会让下面所有构建的目标都带上这个宏参与编译,同样不推荐使用
第二种:target_compile_definitions (推荐使用)
target_compile_definitions(<target> <DEFINE1> <DEFINE2> …)
<target> 是要添加宏定义的目标(例如可执行文件、静态库等)
<scope> 是定义的作用范围(例如 PUBLIC、PRIVATE 或 INTERFACE)
<DEFINE1>、<DEFINE2> 等是要添加的宏定义。
需要注意的是,target_compile_definitions需要写在已经构建的目标后,例如target是demo这个可执行文件,那么在target前需要首先调用add_executable,在有demo这个目标后再再调用target_compile_definitions,否则会出现构建报错
8. 检查软件包
find_package( [version] # 指定要查找的库或者模块(版本号可选)
[EXACT] # 要求version完全匹配
[QUIET] # 无论找到与否,都不产生任何提示性消息
[REQUIRED] # 要求必须找到 xxx.cmake,找不到就提示报错
[[COMPONENTS] [components…]] 查找 Package 中的指定模块,COMPONENTS 跟的是一个列表,只要列表中任意一个模块没有被找到,则认为整个 Package 没有被找到,即 <PackageName>_FOUND 为 false(如果存在REQUIRED选项,则可以省略COMPONENTS关键字)
[OPTIONAL_COMPONENTS [components…]]
[MODULE] # 仅使用模块模式
[CONFIG|NO_MODULE] # 仅使用配置模式(两种写法是等效的)
[GLOBAL]
[NO_POLICY_SCOPE]
[BYPASS_PROVIDER]
)
find_package 一般都内置了一些变量:
_FOUND:可以判断是否找到对应的包或者模块
_INCLUDE_DIR:表示头文件目录(前提是包被找到才会被自动设置)
_LIBRARIES:表示库文件
以opencv为例
# 检索OpenCV库
find_package(OpenCV REQUIRED)add_executable(main src/main.cpp)
if(OpenCV_FOUND)# 引入头文件目录include_directories(${OpenCV_INCLUDE_DIRS})# 链接库文件target_link_libraries(main ${OpenCV_LIBRARIES})
else(OpenCV_FOUND)message(FATAL_ERROR "OpenCV library not found")
endif()
9.添加头文件搜索路径
include_directories([AFTER|BEFORE] [SYSTEM] dir1 [dir2 …])
AFTER|BEFORE: 指定添加的搜索路径的位置,默认是 AFTER,即添加到已有的搜索路径之后。可以使用 BEFORE 将搜索路径添加到已有的搜索路径之前。
SYSTEM: 表示目录是系统目录,编译器会忽略其中的头文件的警告。可以不加
dir1 [dir2 …]: 要添加到搜索路径的目录列表。
10.构建带有层级目录的工程
如果我们想编译一个二进制文件,而这个二进制文件需要链接一个动态库,这个动态库也是需要实时编译出来给二进制使用的,这时候我们就可以使用add_subdirectory、add_dependencies来建构
add_subdirectory(subdirectory_path binary_output_path)
subdirectory_path为子目录的路径:指定要添加的子目录的路径。
binary_output_path为二进制输出目录:指定生成的二进制文件(库或可执行文件)的输出路径。
当我们执行cmake 时,它会进入指定的子目录中,执行该子目录下的 CMakeLists.txt 文件,并将生成的二进制文件输出到指定的二进制输出目录。
add_dependencies(target_name dependency_target_name)
target_name为目标名称:指定当前目标的名称。
dependency_target_name为依赖目标名称:指定当前目标所依赖的目标的名称。
当运行 cmake 构建项目时,如果当前目标依赖于另一个目标,则会先构建所依赖的目标,然后再构建当前目标。这可以确保在构建当前目标之前,其所依赖的目标已经被正确地构建完成。
下面是示例:
这是主目录与子目录的CMakeList内容
主目录cat CMakeLists.txt
cmake_minimum_required(VERSION 2.8)
project(DEMO)include_directories(./include)# 添加可执行文件目标
add_executable(demo ./demo.c)# 将 demo 目标与 lib 目标链接
target_link_libraries(demo add)add_subdirectory(lib ./lib/)
add_dependencies(demo add)子目录:cat lib/CMakeLists.txt
cmake_minimum_required(VERSION 2.8project)
project(ADD)
add_library(add SHARED add.c)下面是目录结构
.
├── CMakeLists.txt
├── demo.c
├── include
│ └── add.h
└── lib├── add.c└── CMakeLists.txt10:30 上午 cmake cat demo.c
#include <stdio.h>
#include "add.h"int main()
{printf("%d\n",add(1,2));return 0;
}10:31 上午 cmake cat lib/add.c
int add(int a,int b)
{return a+b;
}在主目录下执行cmake. && make,发现lib下生成了libadd.so,并且主目录下生成了我们需要的demo可执行文件,运行结果为3
11.设置二进制的生成路径
当我们执行add_executable后,通常需要把二进制放到指定的目录,这时候就可以通过install来实现,相当于操作了make install
install([Target | File | Directory | Script] my_executable DESTINATION you_path)
目标(Target):可以使用构建生成的目标名称作为第一个参数。
文件(File):可以使用文件路径作为第一个参数。
目录(Directory):可以使用目录路径作为第一个参数。
脚本(Script):可以使用脚本文件路径作为第一个参数。
示例:
install(TARGETS my_executable
DESTINATION bin)
install(FILES ${CMAKE_CURRENT_SOURCE_DIR}/README.md
DESTINATION share)
示例中,my_executable 是一个已经定义的可执行目标,它将被安装到 bin 目录中。同时,项目根目录下的 README.md 文件将被安装到 share 目录中。
这篇关于CmakeList教程的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








