【等距螺旋的公式】
等距螺旋公式是从风螺旋公式引用而来,它根据直线运动速度w,圆周运动速度v,以及直线与圆周的位置关系DA(sinDA= D/r)来表示。
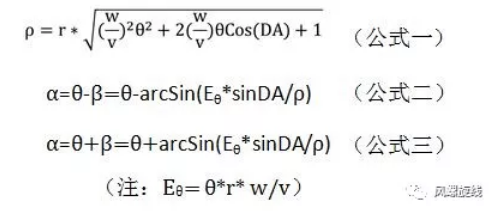
公式一通过余弦定理推导而来,代表从圆心到螺旋线上一点的距离,是公共部分。公式二与公式三分别代表了不同角度关系下的表达方式。然而,包含了顺逆时针的旋转方向之后,角度关系远比相像的要复杂。
【等距螺旋的突变点计算】
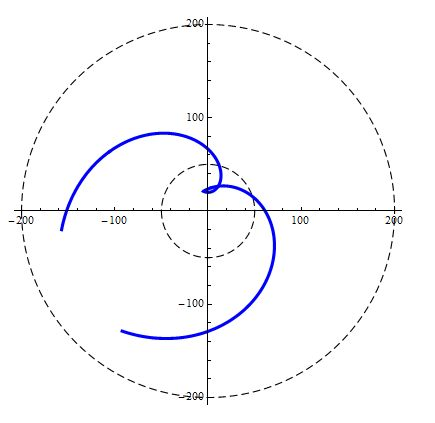
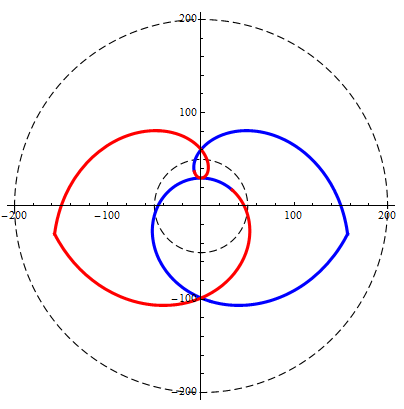
我们按照直线与圆相交与下部(直线距离圆心20单位,圆半径50单位)来看,我们期望的螺旋应是图1中的样子。

然而,用数学软件代入公式2来实现以后却是下面的样子:
根据实验,发现公式三加上Pi(即 ?=?+?+Pi),叠加到图形里以后是下面的样子:
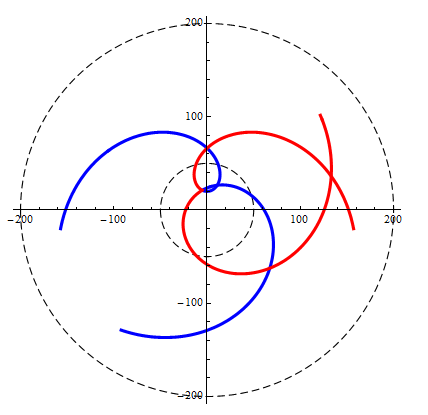
从上图中可以看到,在负值区间里(图中坐标系设定为:逆时针角度增大,水平向右为零度轴),螺旋线发生了明显的突变,而这个突变可以看成是从一个轨迹突变到了另一个旋转方向的轨迹上去。
既然公式二与公式三在某个点会相交,突变点一定是同时满足这两个公式的计算。于是将公式二与公式三画等号,?-?= ?+?+Pi 化简之后得到突变点出现的位
置为t= -v⁄(w*Cos[DA])。通过分段显曲线,突变点之前用公式一,则突变点之后用公式二,得到下面的图形:
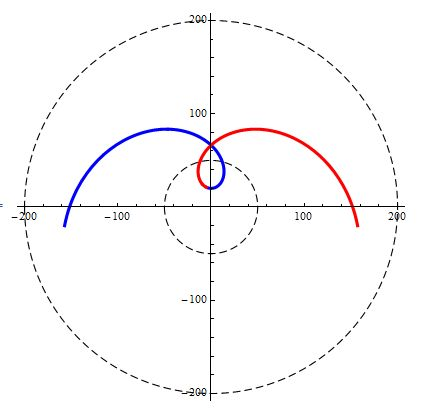
突变点之前用公式二,则突变点之后用公式一,得到下面的图形:
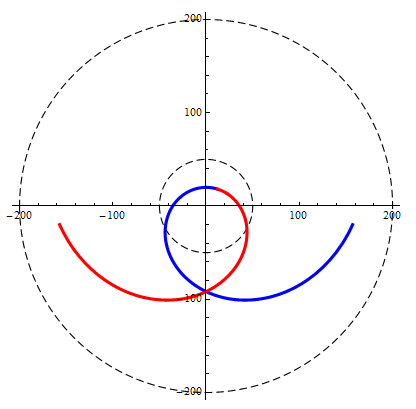
通过对比可以知道,上面两条螺旋的区别就在于旋转方向的不同。
【等距螺旋的角度控制】
从直线与圆周的交点,运动到近地点(D),直线距离为r*cosDA,对应的时间长度为r*cosDA/w,这个时间段对应的圆弧长度为v*(r*cosDA/w),对应的角度为(弧度单位)2Pi*v*(r*cosDA/w)/(2Pi*r)=v*cosDA/w。用这个角度加上DA或减去DA,做为初始角度,可以实现螺旋线水平对称摆放。
Mathematica软件中的验证代码如下,无论改变半径大小或速度大小,都可以得到运动轨迹相同的效果:
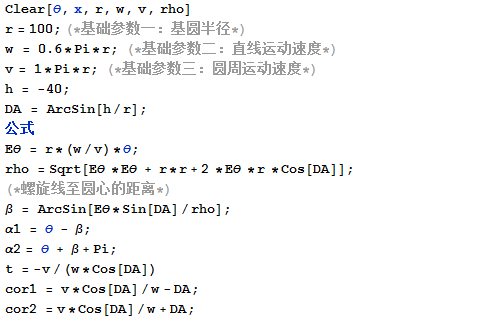
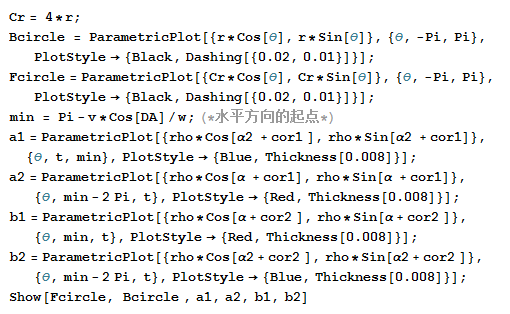
通过实验可以发现,等距螺旋的关键参数包含:半径r,速度比 w/v,直线与圆心的距离h(可以用DA角度来表示)。对于公式使用来说,由两套公式共同构成一条完整的螺旋。螺旋的形态异除了参数的问题外,旋转方向也是一个很重要的因素。
【软件下载】
等距螺旋实验演示软件:
https://pan.baidu.com/s/1d7KeVKclptXuvuGI5XMFBA
扩展阅读
【等距螺旋的七个实验】实验一 阿基米德螺旋的再认识
【等距螺旋的七个实验】实验二 渐开线的再认识
史上最详细的等距螺旋公式的推导步骤
等距螺旋的数学验证









