本文主要是介绍基于SkyEye仿真飞腾处理器:运行U-Boot并加载Phytium-FreeRTOS,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
仿真平台在帮助提升研发效率、加快产品面市时间上的作用已得到诸多验证,通过对处理器进行仿真来支持嵌入式系统及软件的虚拟化开发、测试和验证成为目前应用较为广泛的方法。天目全数字实时仿真软件SkyEye是一款基于可视化建模的硬件行为级仿真平台,在众多仿真工具中有着国产自主可控、所支持的处理器种类更为全面等优点。
本文主要关于如何基于SkyEye实现飞腾处理器的仿真,以及如何在飞腾仿真处理器上运行U-Boot并通过网络加载Phytium-FreeRTOS。
01.U-Boot
U-Boot(Universal Bootloader)是一个用于嵌入式系统与设备的轻量级引导加载程序,主要用于在启动时初始化硬件并加载操作系统。作为一个开源项目,U-Boot支持用户查看、修改和分发源代码,符合自由软件的原则。
具体来说,U-Boot负责初始化嵌入式系统的硬件,包括处理器、内存、外设等,其加载引导的操作系统可以是Linux、Android等嵌入式操作系统;同时提供一个命令行界面,用户可以通过该界面执行各种命令,例如烧写Flash、通过网络启动操作系统等。生态方面,U-Boot广泛支持多种处理器架构,包括ARM、MIPS、PowerPC、RISC-V等,并且具备很强的可移植性,可以轻松地移植到不同的硬件平台上。
02.编译U-Boot
在编译使用环境的选择上,推荐使用Ubuntu系统(本文演示中使用的是Ubuntu22.04系统)。在下载源码编译之前,需要做以下准备:
-
安装git
-
安装gcc-aarch64-linux-gnu交叉编译工具链
-
安装make
在shell中使用以下命令安装git、make以及gcc-aarch64-linux-gnu:
sudo apt install git make gcc-aarch-linux-gnu2.1 下载飞腾官方移植好的U-Boot源码
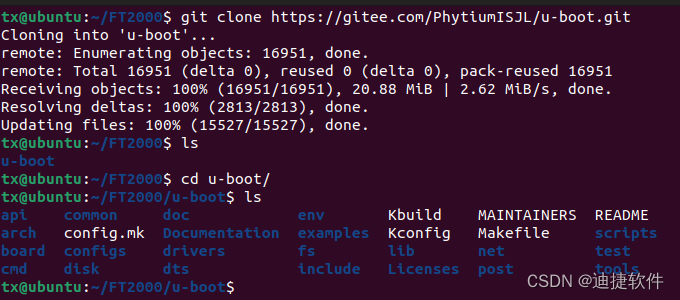
源码可以通过飞腾在gitee上的仓库下载,在shell环境中执行下面的命令:
git clone https://gitee.com/PhytiumISJL/u-boot.git使用上述git命令后,git将会从代码仓库中下载飞腾官方U-Boot源码,如下图所示。u-boot目录即为下载得到的飞腾官方U-Boot源码。
2.2 编译U-Boot
2.2.1 设置环境变量
开始编译前,出于U-Boot支持多种目标架构的原因,需要根据目标平台以及所用的交叉编译工具链设置ARCH和CROSS_COMPILE两个环境变量。
编辑~/路径下的.bashrc文件,在文件末尾加入两行脚本:
export ARCH=armexport CROSS_COMPILE=aarch64-linux-gnu-
设置后需要重新启动终端,或者使用【source ~/.bashrc】命令让配置在当前终端立即生效。
2.2.2 编译
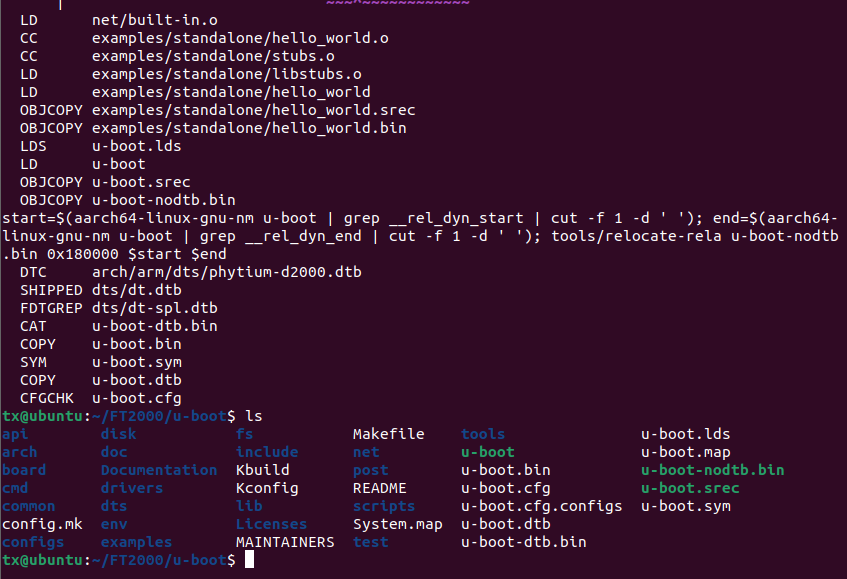
对U-Boot的编译可通过执行下列命令来完成。编译完成后将会得到可以在FT2000处理器中运行的U-Boot二进制可执行文件。
make D2000_defconfig && make下图是编译过程中最后一部分输出信息以及编译后的目录结构,从中可以看到编译生成了u-boot-nodtb.bin文件,该文件即为将要被加载到FT2000处理器中运行的U-Boot。
在后续加载u-boot-dtb.bin文件至基于SkyEye仿真的FT2000处理器上运行的过程中,需要配置程序的入口地址。该地址可以通过readelf命令查看u-boot得到,u-boot为elf格式的可执行文件,查看信息如下:
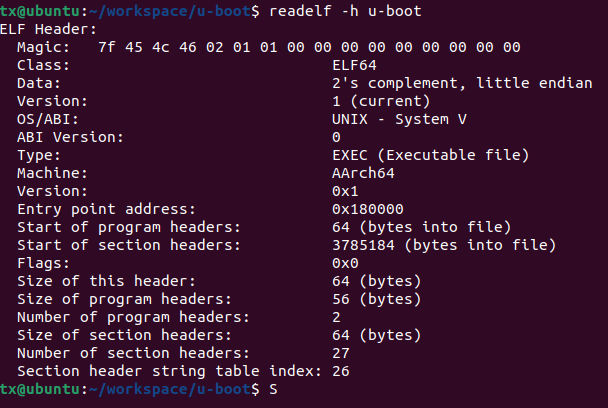
u-boot-dtb.bin文件是使用aarch64-linux-gnu-objcopy命令将u-boot转换为bin文件格式所得到的,因此其入口地址是一致的。从上图可知其入口地址为0x180000。
03.编译Phytium-FreeRTOS
FreeRTOS(Real-Time Operating System)是一个开源的、实时的嵌入式操作系统内核,专为小型嵌入式系统设计。Phytium-FreeRTOS是由Phytium官方专为FT2000-4、D2000等处理器定制的FreeRTOS移植版本,可以在Windows、Linux系统上搭建环境编译得到Phytium-FreeRTOS镜像,本文将以Windows系统为例。
3.1 Phytium-FreeRTOS-SDK开发环境
Phytium官方提供了一个FreeRTOS的开发环境,可供快速构建和开发Phytium-FreeRTOS的程序镜像,具体可通过以下网址获取开发环境:
https://gitee.com/phytium_embedded/phytium-free-rtos-sdk
Phytium-FreeRTOS-SDK开发环境集成了MSYS2、arm-none-eabi-gcc、aarch64-none-elf-gcc、tftpd64等工具。
-
MSYS2
Msys2 portable环境, 主要提供Windows上的shell命令行开发环境,包括Cygwin(POSIX兼容性层)和MinGW-w64。
-
arm-none-eabi-gcc、aarch64-none-elf-gcc
基于MinGW-w64构建的专门用于ARM架构的交叉编译工具链。
-
tftpd64
提供tftp服务,用于通过网络下载二进制镜像文件,主要功能包括安装tftp32服务和配置tftp目录。
3.2 配置环境变量
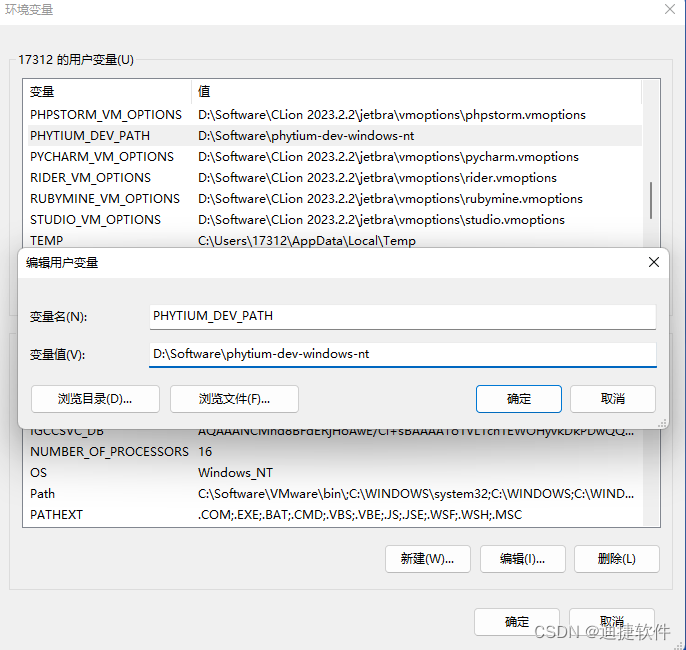
添加Windows环境变量【PHYTIUM_DEV_PATH】(环境变量名不能自定义),例如指向目录【D:\Software\phytium-dev-windows-nt】(Phytium-FreeRTOS-SDK开发环境的存放路径可以自定义)。
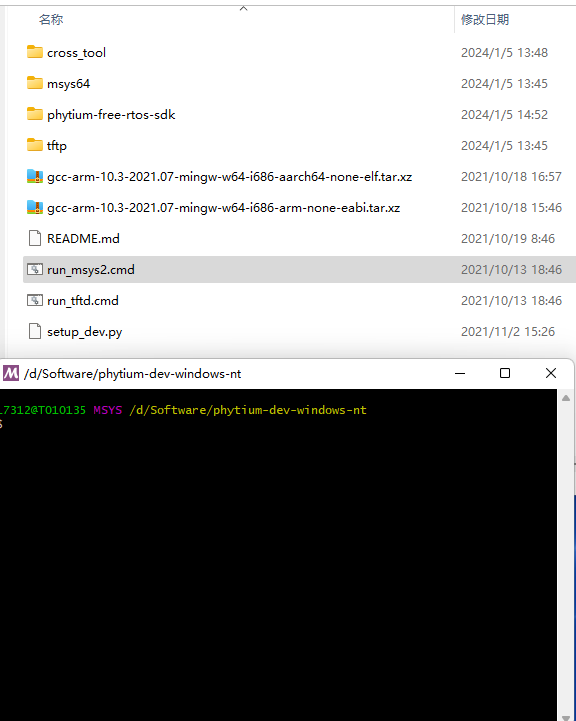
3.3 进入Phytium-FreeRTOS-SDK编译环境
Phytium-FreeRTOS-SDK编译环境基于MSYS2构建,所以编译过程在MSYS2提供的shell中进行。双击【run_msys2.cmd】进入开发环境,如下图所示:
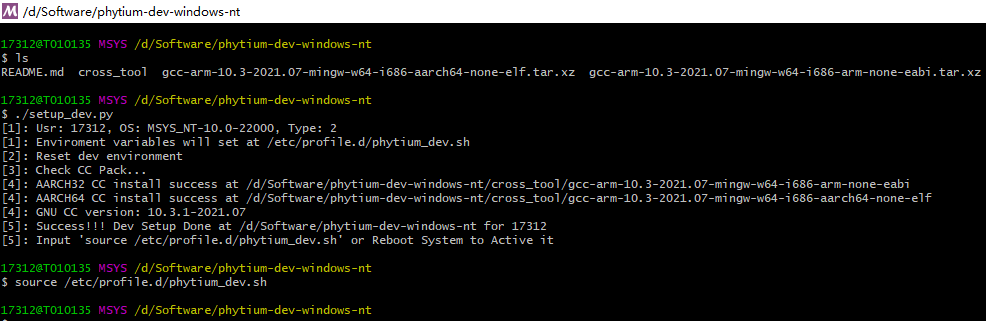
进入开发环境后,执行当前目录下的setup_dev.py以初始化开发环境。该Python脚本会解压并安装Phytium-FreeRTOS-SDK开发环境自带的交叉编译工具链,安装完成后重启系统或者执行下述命令,可以使编译工具链的环境生效:
source /etc/profile.d/phytium_dev.sh以上过程如下图所示:
3.4 拉取Phytium-FreeRTOS-SDK源码
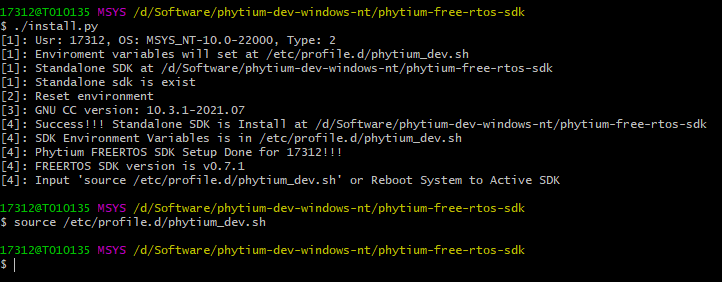
上述章节的步骤完成后,可以在phytium-dev-windows-nt目录下使用下述git命令实现Phytium-FreeRTOS-SDK源码的拉取。
git clone https://gitee.com/phytium_embedded/phytium-free-rtos-sdk.git ./phytium-free-rtos-sdk进入拉取到的源码路径下,执行该路径下的install.py脚本,将会安装Standalone SDK和设置环境变量,安装完成后重启系统或者执行下述命令可使编译环境立即生效:
source /etc/profile.d/phytium_dev.sh以上执行过程如下图所示:
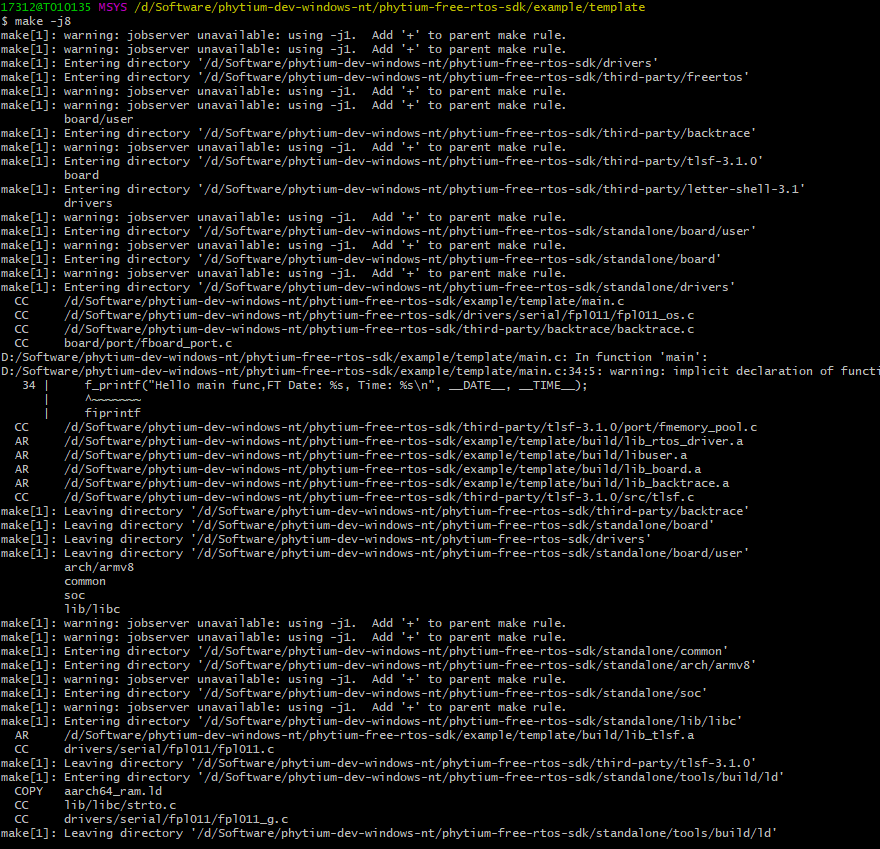
3.5 编译
完成上述步骤后,进入到【/phytium-free-rtos-sdk/example/template】目录,使用make -j8命令编译,编译过程如下图所示:
编译完成后,使用ls查看当前目录下的文件,可以看到freertos.elf可执行文件已经生成。

后续将会使用U-Boot从tftp服务器上下载Phytium-FreeRTOS的程序镜像到目标板卡上运行,此处以下载freertos.bin文件为例。
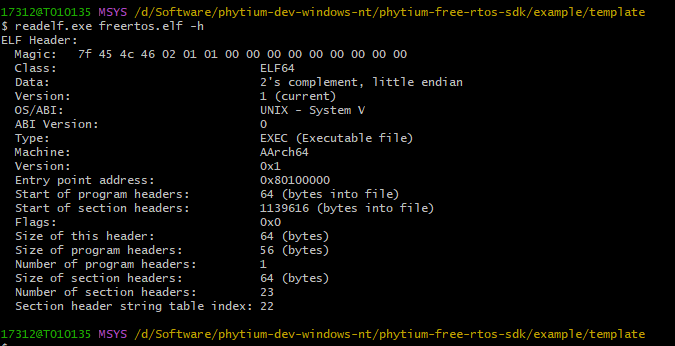
通过readelf工具可以查看到freertos.elf可执行文件为AArch64架构,程序入口地址为0x80100000,后续在SkyEye中加载该可执行文件将会用到这个地址,详细信息如下图所示:
04.SkyEye仿真FT2000运行U-Boot
4.1 SkyEye仿真FT2000
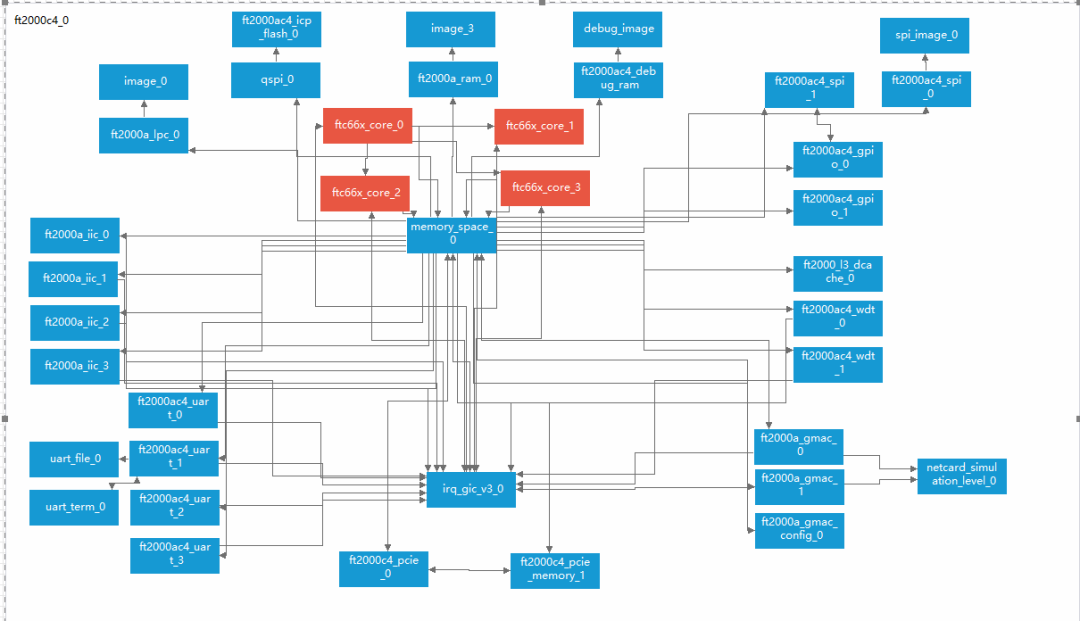
SkyEye支持用户通过拖拽的方式对硬件进行行为级别的仿真和建模。使用SkyEye仿真的FT2000处理器可视化模型如下图所示:
4.2 配置SkyEye脚本
处理器仿真模型搭建完成后,需要配置SkyEye脚本来加载镜像启动。该脚本的工作主要是解析json文件并示例化模型对象、将镜像加载到指定地址、设置PC寄存器、最后开始执行。
define-conf D2000.jsonload-file ftc663_core_0 binary/u-boot-dtb.bin 0x180000set-pc ftc663_core_0 0x180000init-ok
4.3 运行U-boot
在SkyEye中加载U-boot,运行结果如下图所示:
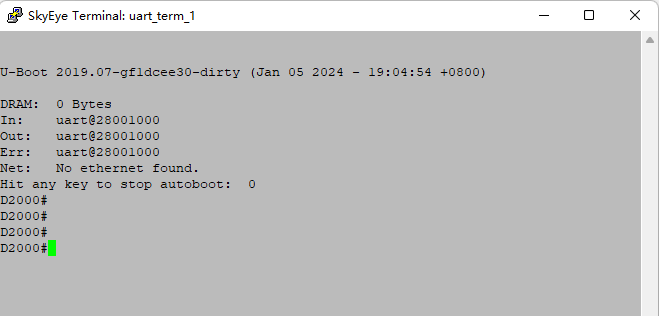
从上图的串口输出信息中可知,U-Boot已经成功启动并进入命令行,接下来只需搭建好TFTP服务器,便可通过TFTP服务器下载freertos.bin运行。
05.U-Boot加载Phytium-FreeRTOS运行
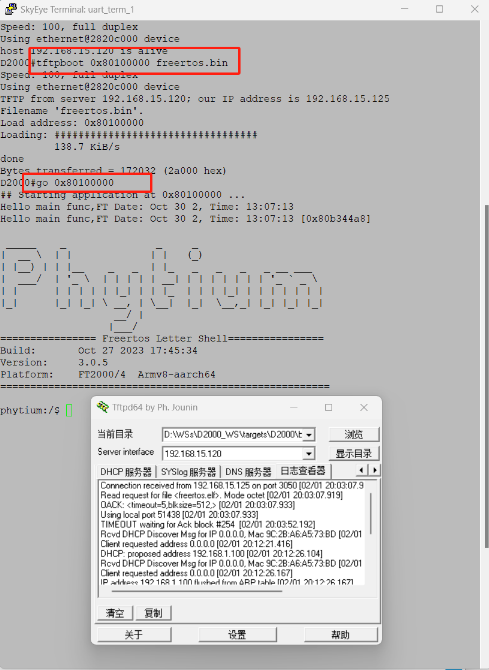
U-Boot可以通过tftboot命令从tftp服务器上下载镜像至目标板卡的指定地址处,并使用go命令启动镜像。
5.1 tftp服务器搭建
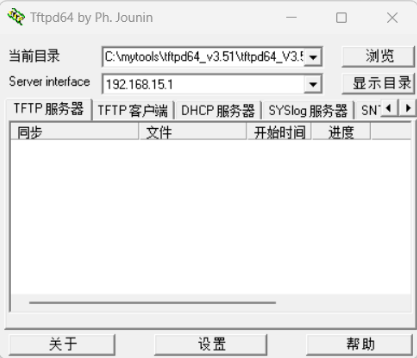
本文选择使用TFTPD64来实现tftp服务器的搭建。TFTPD64是一个基于Windows平台、简单易用的TFTP服务器搭建软件,可供快速搭建TFTP服务器。软件安装后如下图所示,需要根据实际的freertos.bin文件存放路径以及本机网卡的IP地址来设置Current Directory和Server interface。
5.2 tftpboot命令下载镜像启动
tftp服务器搭建完成后,使用tftpboot命令从服务器下载镜像到0x80100000地址处,该地址为freertos.bin的程序入口地址。下载镜像到对应地址后,使用go命令启动镜像。如下图所示,红框中为用U-Boot加载镜像和启动镜像执行的命令,U-Boot已经成功实现Phytium-FreeRTOS的启动:
这篇关于基于SkyEye仿真飞腾处理器:运行U-Boot并加载Phytium-FreeRTOS的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




