本文主要是介绍【保姆级教程|YOLOv8改进】【3】使用FasterBlock替换C2f中的Bottleneck,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
《博主简介》
小伙伴们好,我是阿旭。专注于人工智能、AIGC、python、计算机视觉相关分享研究。
✌更多学习资源,可关注公-仲-hao:【阿旭算法与机器学习】,共同学习交流~
👍感谢小伙伴们点赞、关注!
《------往期经典推荐------》
一、AI应用软件开发实战专栏【链接】
| 项目名称 | 项目名称 |
|---|---|
| 1.【人脸识别与管理系统开发】 | 2.【车牌识别与自动收费管理系统开发】 |
| 3.【手势识别系统开发】 | 4.【人脸面部活体检测系统开发】 |
| 5.【图片风格快速迁移软件开发】 | 6.【人脸表表情识别系统】 |
| 7.【YOLOv8多目标识别与自动标注软件开发】 | 8.【基于YOLOv8深度学习的行人跌倒检测系统】 |
| 9.【基于YOLOv8深度学习的PCB板缺陷检测系统】 | 10.【基于YOLOv8深度学习的生活垃圾分类目标检测系统】 |
| 11.【基于YOLOv8深度学习的安全帽目标检测系统】 | 12.【基于YOLOv8深度学习的120种犬类检测与识别系统】 |
| 13.【基于YOLOv8深度学习的路面坑洞检测系统】 | 14.【基于YOLOv8深度学习的火焰烟雾检测系统】 |
| 15.【基于YOLOv8深度学习的钢材表面缺陷检测系统】 | 16.【基于YOLOv8深度学习的舰船目标分类检测系统】 |
| 17.【基于YOLOv8深度学习的西红柿成熟度检测系统】 | 18.【基于YOLOv8深度学习的血细胞检测与计数系统】 |
| 19.【基于YOLOv8深度学习的吸烟/抽烟行为检测系统】 | 20.【基于YOLOv8深度学习的水稻害虫检测与识别系统】 |
| 21.【基于YOLOv8深度学习的高精度车辆行人检测与计数系统】 | 22.【基于YOLOv8深度学习的路面标志线检测与识别系统】 |
| 22.【基于YOLOv8深度学习的智能小麦害虫检测识别系统】 | 23.【基于YOLOv8深度学习的智能玉米害虫检测识别系统】 |
| 24.【基于YOLOv8深度学习的200种鸟类智能检测与识别系统】 | 25.【基于YOLOv8深度学习的45种交通标志智能检测与识别系统】 |
| 26.【基于YOLOv8深度学习的人脸面部表情识别系统】 | 27.【基于YOLOv8深度学习的苹果叶片病害智能诊断系统】 |
| 28.【基于YOLOv8深度学习的智能肺炎诊断系统】 | 29.【基于YOLOv8深度学习的葡萄簇目标检测系统】 |
二、机器学习实战专栏【链接】,已更新31期,欢迎关注,持续更新中~~
三、深度学习【Pytorch】专栏【链接】
四、【Stable Diffusion绘画系列】专栏【链接】
《------正文------》
前言

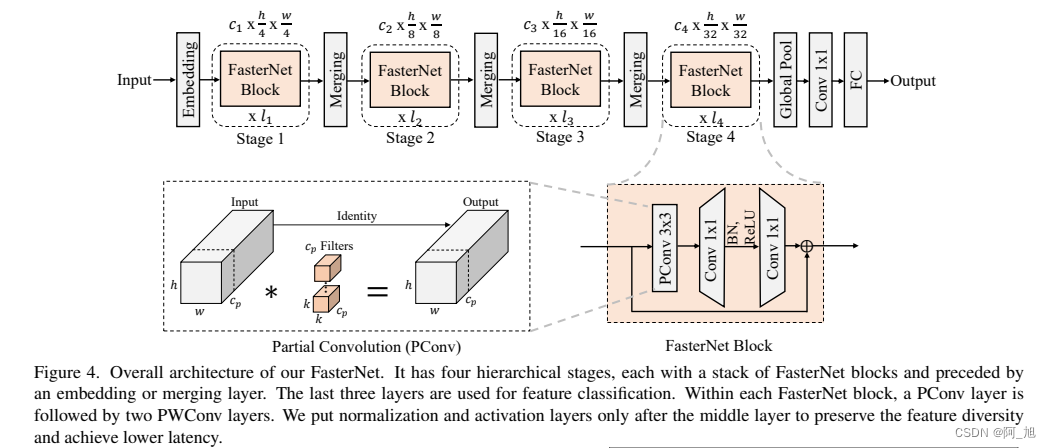
FasterNet是为了提升网络的推理速度而设计的一种新型的神经网络结构,它比其他网络在各种视觉任务上实现了更高的运行速度,同时对准确性没有降低。本文详细介绍了如何使用FasterNet中的FasterBlock替换YOLOv8的C2f中Bottleneck模块,并且使用修改后的yolov8进行目标检测训练与推理。本文提供了所有源码免费供小伙伴们学习参考,需要的可以通过文末方式自行下载。
本文改进使用的ultralytics版本为:ultralytics == 8.0.227
目录
- 前言
- 1.FasterNet简介
- 1.1 FasterNet网络结构
- 1.2 性能对比
- 2.使用FasterBlock替换C2f中的Bottleneck
- 替换位置与替换后网络结构示意
- 定义`C2f_Faster`类
- 在不同文件导入新建的C2f类
- 在`parse_model`解析函数中添加`C2f_Faster`类
- 创建新的配置文件`c2f_Faster_yolov8.yaml`
- 新的`c2f_Faster_yolov8.yaml`配置文件与原yolov8.yaml文件的对比如下:
- 加载配置文件并训练
- 模型推理
- 【源码免费获取】
- 结束语
1.FasterNet简介
论文发表时间:2023.05.21
github地址:https://github.com/JierunChen/FasterNet.
paper地址:https://arxiv.org/abs/2303.03667
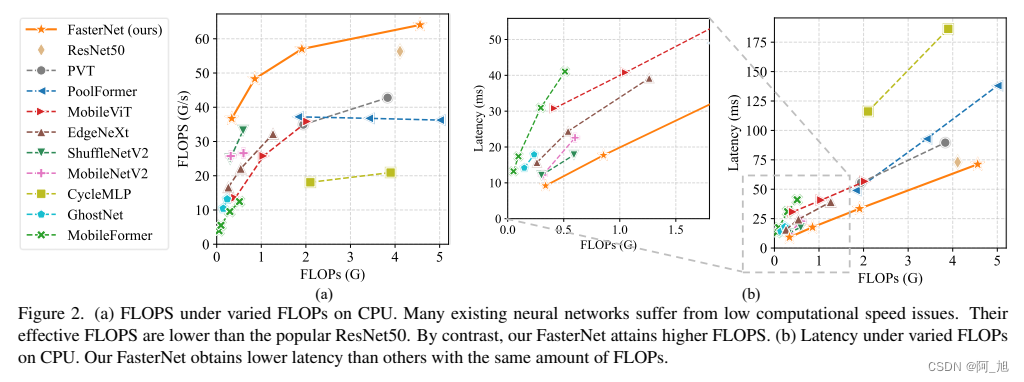
摘要:为了设计快速的神经网络,许多研究都专注于减少浮点运算量(FLOPs)。然而,我们观察到这种FLOPs的减少并不一定导致延迟的相似程度的减少。这主要是因为浮点操作每秒(FLOPS)效率低下。为了实现更快的网络,我们重新审视了流行的操作符,并证明了低FLOPS主要是由于操作符的频繁内存访问,特别是深度卷积。因此,我们提出了一种新颖的部分卷积(PConv),通过同时减少冗余的计算和内存访问来更高效地提取空间特征。在我们的PConv基础上,我们进一步提出了FasterNet,这是一系列新的神经网络,比其他网络在各种视觉任务上实现了更高的运行速度,同时对准确性没有妥协。例如,在ImageNet-1k上,我们小巧的FasterNet-T0在GPU、CPU和ARM处理器上分别比MobileViT-XXS快2.8倍、3.3倍和2.4倍,同时准确率更高2.9%。我们的大型FasterNet-L在GPU上实现了令人印象深刻的83.5%的Top-1准确率,与新兴的Swin-B不相上下,同时在GPU上推理吞吐量比Swin-B高出36%,在CPU上节省了37%的计算时间。
论文主要亮点如下:
• 我们指出在实现更快的神经网络时,实现更高的FLOPS比仅仅减少FLOPS更重要。
• 我们引入了一种简单而快速有效的操作符,称为PConv,它有很高的潜力可以取代现有的首选选择DWConv。
• 我们引入了FasterNet,在各种设备上都表现出非常快的运行速度,如GPU、CPU和ARM处理器。
• 我们对各种任务进行了广泛的实验证明了我们的PConv和FasterNet的高速和有效性。
1.1 FasterNet网络结构
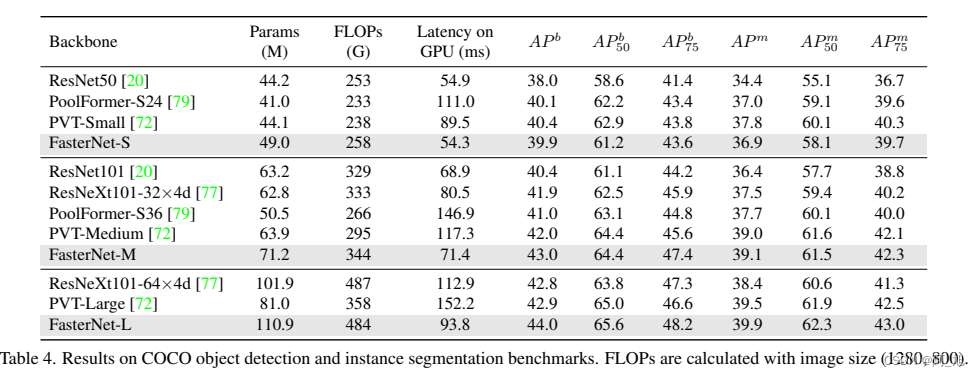
1.2 性能对比
2.使用FasterBlock替换C2f中的Bottleneck
替换位置与替换后网络结构示意
C2f中替换的位置

替换后的YOLOv8网络结构如下:
定义C2f_Faster类
在ultralytics/nn/modules/block.py中添加如下代码块,并定义C2f_Faster类:
from timm.models.layers import DropPathclass Partial_conv3(nn.Module):def __init__(self, dim, n_div=4, forward='split_cat'):super().__init__()self.dim_conv3 = dim // n_divself.dim_untouched = dim - self.dim_conv3self.partial_conv3 = nn.Conv2d(self.dim_conv3, self.dim_conv3, 3, 1, 1, bias=False)if forward == 'slicing':self.forward = self.forward_slicingelif forward == 'split_cat':self.forward = self.forward_split_catelse:raise NotImplementedErrordef forward_slicing(self, x):# only for inferencex = x.clone() # !!! Keep the original input intact for the residual connection laterx[:, :self.dim_conv3, :, :] = self.partial_conv3(x[:, :self.dim_conv3, :, :])return xdef forward_split_cat(self, x):# for training/inferencex1, x2 = torch.split(x, [self.dim_conv3, self.dim_untouched], dim=1)x1 = self.partial_conv3(x1)x = torch.cat((x1, x2), 1)return xclass Faster_Block(nn.Module):def __init__(self,inc,dim,n_div=4,mlp_ratio=2,drop_path=0.1,layer_scale_init_value=0.0,pconv_fw_type='split_cat'):super().__init__()self.dim = dimself.mlp_ratio = mlp_ratioself.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity()self.n_div = n_divmlp_hidden_dim = int(dim * mlp_ratio)mlp_layer = [Conv(dim, mlp_hidden_dim, 1),nn.Conv2d(mlp_hidden_dim, dim, 1, bias=False)]self.mlp = nn.Sequential(*mlp_layer)self.spatial_mixing = Partial_conv3(dim,n_div,pconv_fw_type)self.adjust_channel = Noneif inc != dim:self.adjust_channel = Conv(inc, dim, 1)if layer_scale_init_value > 0:self.layer_scale = nn.Parameter(layer_scale_init_value * torch.ones((dim)), requires_grad=True)self.forward = self.forward_layer_scaleelse:self.forward = self.forwarddef forward(self, x):if self.adjust_channel is not None:x = self.adjust_channel(x)shortcut = xx = self.spatial_mixing(x)x = shortcut + self.drop_path(self.mlp(x))return xdef forward_layer_scale(self, x):shortcut = xx = self.spatial_mixing(x)x = shortcut + self.drop_path(self.layer_scale.unsqueeze(-1).unsqueeze(-1) * self.mlp(x))return xclass C2f_Faster(C2f):def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5):super().__init__(c1, c2, n, shortcut, g, e)self.m = nn.ModuleList(Faster_Block(self.c, self.c) for _ in range(n))
在不同文件导入新建的C2f类
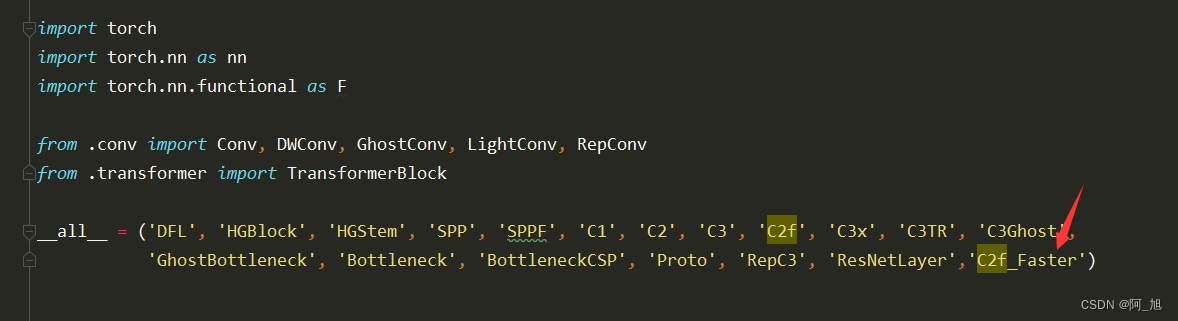
在ultralytics/nn/modules/block.py顶部,all中添加刚才创建的类的名称:C2f_Faster,如下图所示:
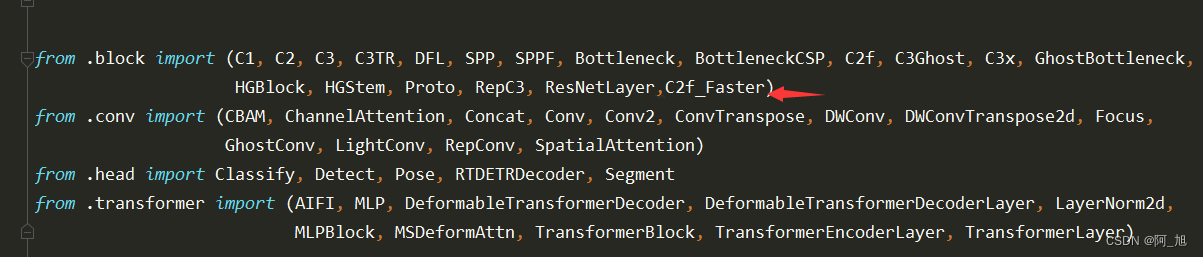
同样需要在ultralytics/nn/modules/__init__.py文件,相应位置导入刚出创建的C2f_Faster类。如下图:
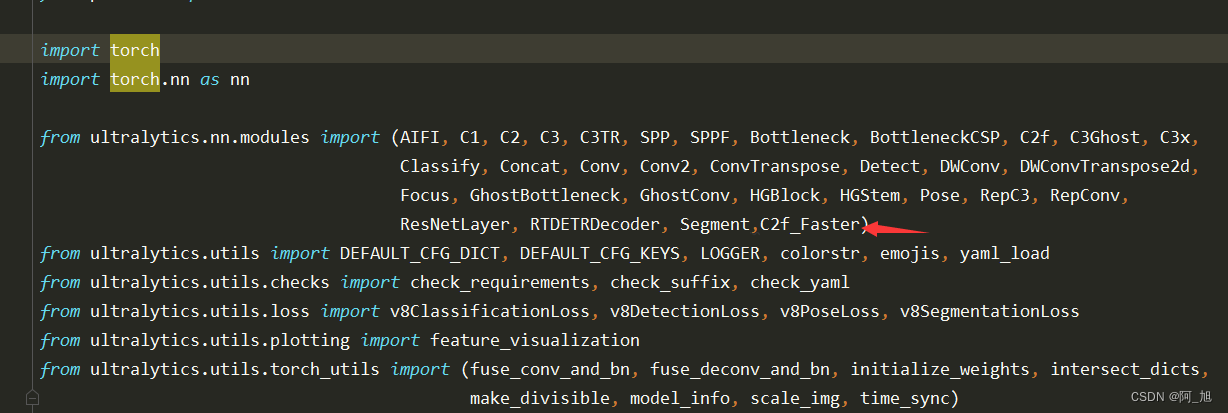
还需要在ultralytics/nn/tasks.py中导入创建的C2f_Faster类,如下图:
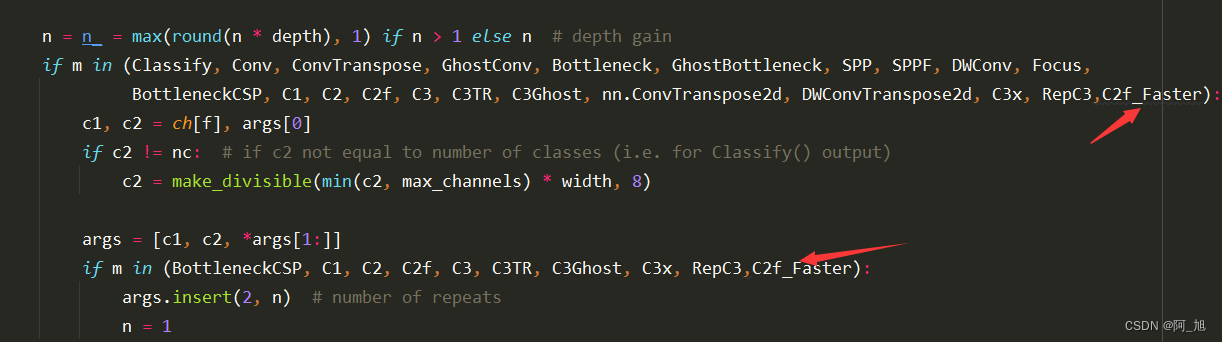
在parse_model解析函数中添加C2f_Faster类
在ultralytics/nn/tasks.py的parse_model解析网络结构的函数中,加入C2f_Faster类,如下图:
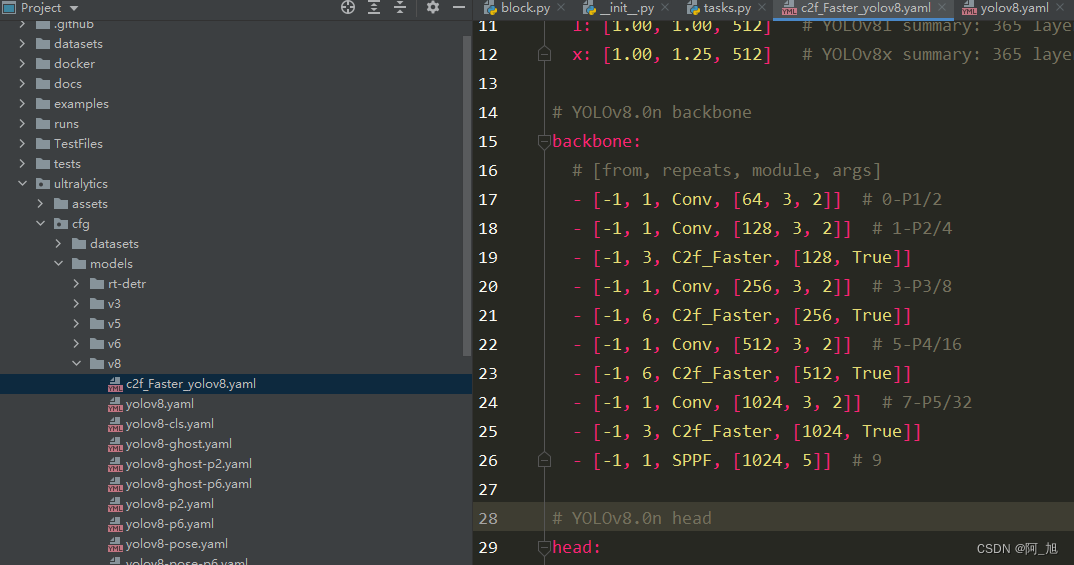
创建新的配置文件c2f_Faster_yolov8.yaml
在ultralytics/cfg/models/v8目录下新建c2f_Faster_yolov8.yaml配置文件,内容如下:
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'# [depth, width, max_channels]n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPss: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPsm: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPsl: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPsx: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs# YOLOv8.0n backbone
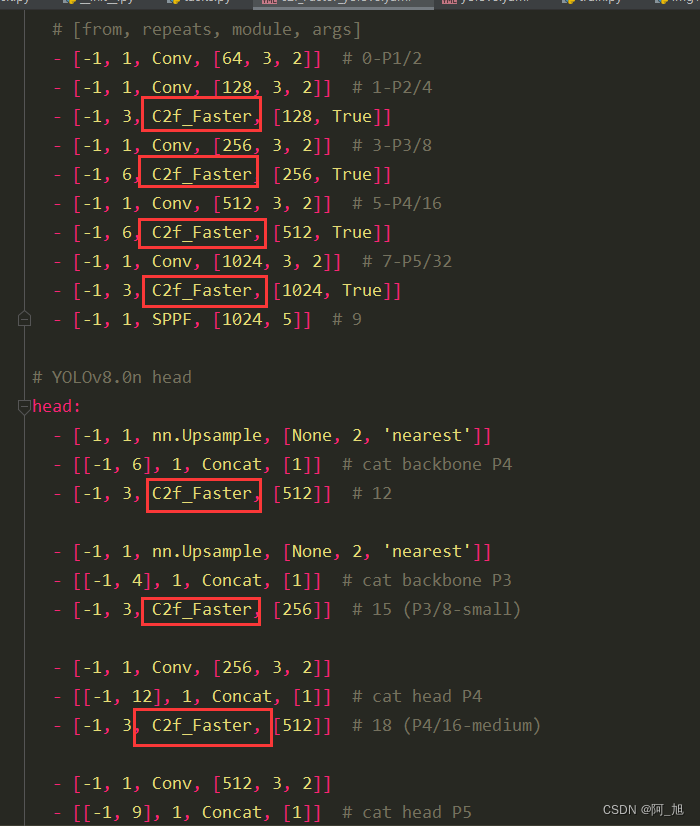
backbone:# [from, repeats, module, args]- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4- [-1, 3, C2f_Faster, [128, True]]- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8- [-1, 6, C2f_Faster, [256, True]]- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16- [-1, 6, C2f_Faster, [512, True]]- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32- [-1, 3, C2f_Faster, [1024, True]]- [-1, 1, SPPF, [1024, 5]] # 9# YOLOv8.0n head
head:- [-1, 1, nn.Upsample, [None, 2, 'nearest']]- [[-1, 6], 1, Concat, [1]] # cat backbone P4- [-1, 3, C2f_Faster, [512]] # 12- [-1, 1, nn.Upsample, [None, 2, 'nearest']]- [[-1, 4], 1, Concat, [1]] # cat backbone P3- [-1, 3, C2f_Faster, [256]] # 15 (P3/8-small)- [-1, 1, Conv, [256, 3, 2]]- [[-1, 12], 1, Concat, [1]] # cat head P4- [-1, 3, C2f_Faster, [512]] # 18 (P4/16-medium)- [-1, 1, Conv, [512, 3, 2]]- [[-1, 9], 1, Concat, [1]] # cat head P5- [-1, 3, C2f_Faster, [1024]] # 21 (P5/32-large)- [[15, 18, 21], 1, Detect, [nc]] # Detect(P3, P4, P5)
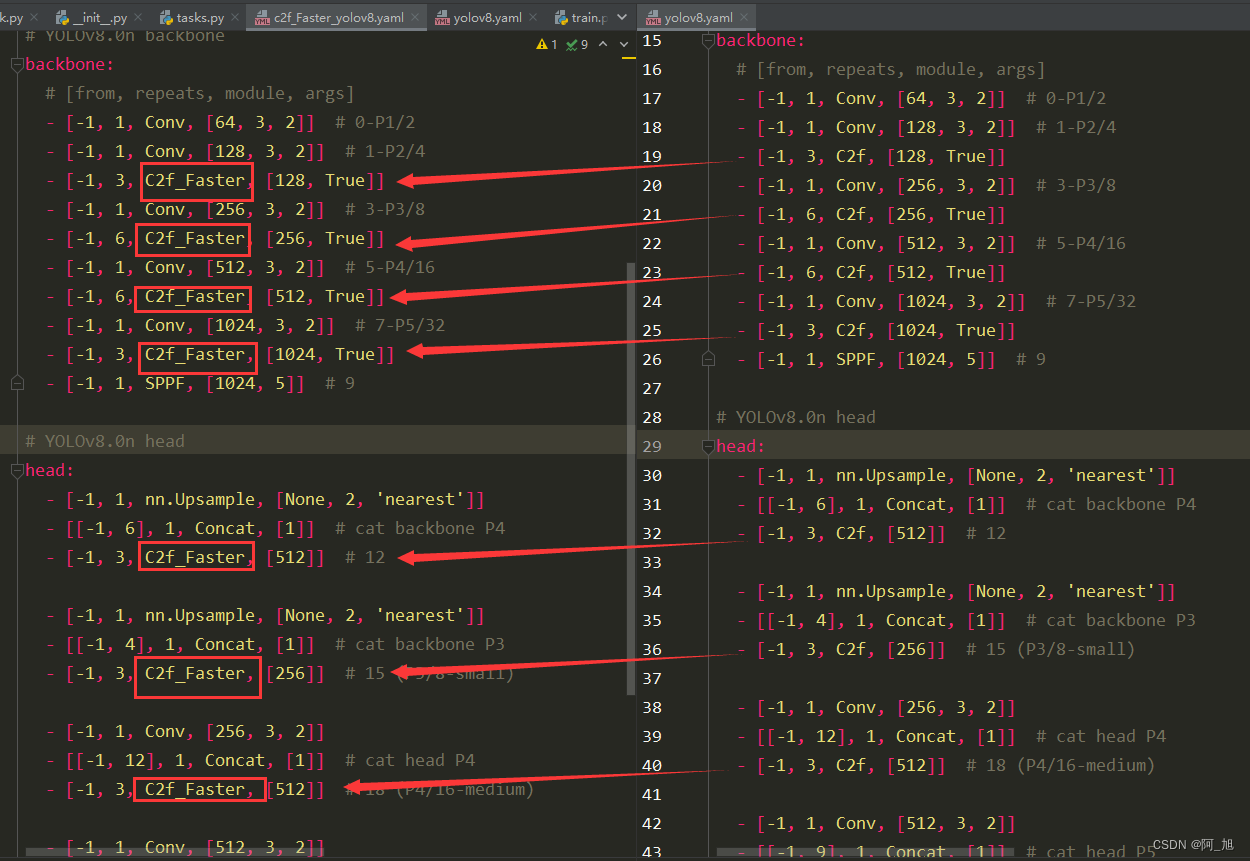
新的c2f_Faster_yolov8.yaml配置文件与原yolov8.yaml文件的对比如下:
加载配置文件并训练
加载c2f_Faster_yolov8.yaml配置文件,并运行train.py训练代码:
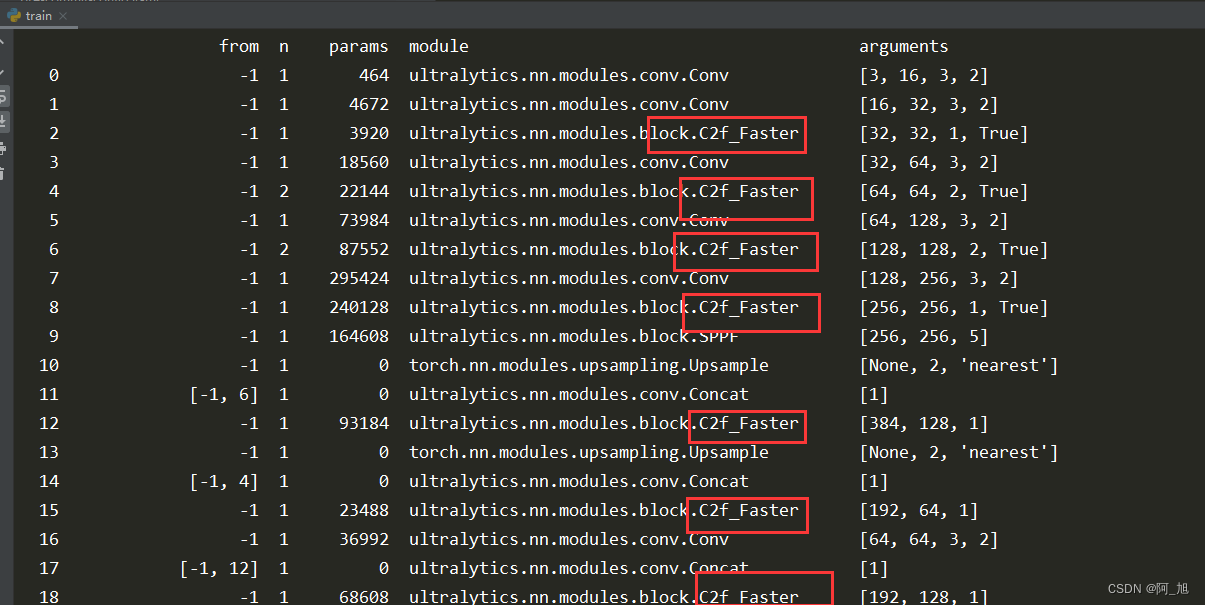
#coding:utf-8from ultralytics import YOLOif __name__ == '__main__':model = YOLO('ultralytics/cfg/models/v8/c2f_Faster_yolov8.yaml')model.load('yolov8n.pt') # loading pretrain weightsmodel.train(data='datasets/TomatoData/data.yaml', epochs=250, batch=4)注意观察,打印出的网络结构是否正常修改,如下图所示:
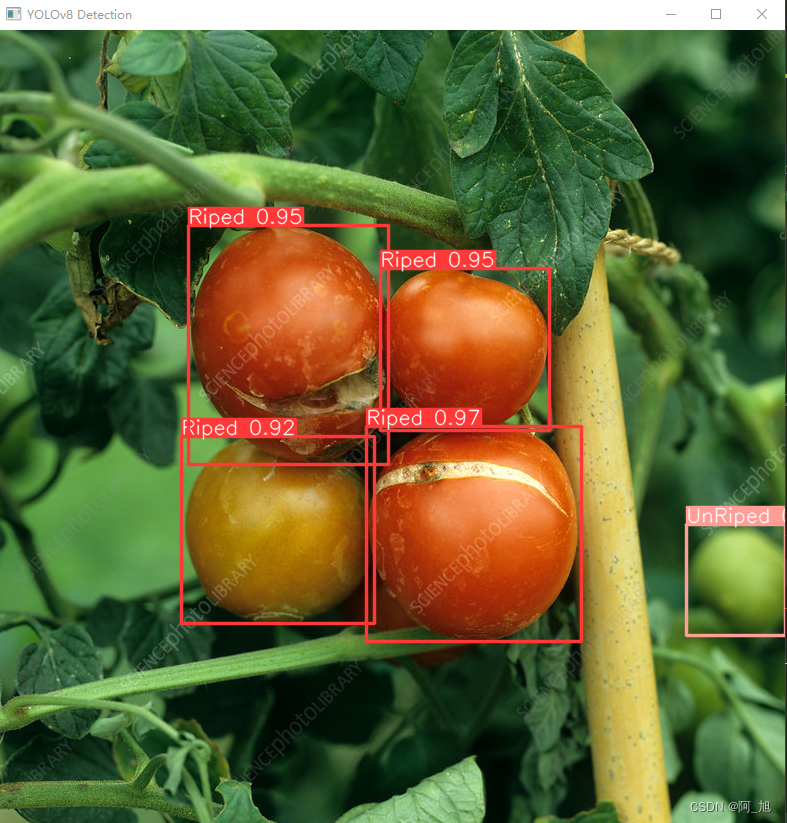
模型推理
模型训练完成后,我们使用训练好的模型对图片进行检测:
#coding:utf-8
from ultralytics import YOLO
import cv2# 所需加载的模型目录
# path = 'models/best2.pt'
path = 'runs/detect/train2/weights/best.pt'
# 需要检测的图片地址
img_path = "TestFiles/Riped tomato_31.jpeg"# 加载预训练模型
# conf 0.25 object confidence threshold for detection
# iou 0.7 intersection over union (IoU) threshold for NMS
model = YOLO(path, task='detect')# 检测图片
results = model(img_path)
res = results[0].plot()
# res = cv2.resize(res,dsize=None,fx=2,fy=2,interpolation=cv2.INTER_LINEAR)
cv2.imshow("YOLOv8 Detection", res)
cv2.waitKey(0)
【源码免费获取】
为了小伙伴们能够,更好的学习实践,本文已将所有代码、示例数据集、论文等相关内容打包上传,供小伙伴们学习。获取方式如下:
关注下方名片G-Z-H:【阿旭算法与机器学习】,发送【yolov8改进】即可免费获取
结束语
关于本篇文章大家有任何建议或意见,欢迎在评论区留言交流!
觉得不错的小伙伴,感谢点赞、关注加收藏哦!
这篇关于【保姆级教程|YOLOv8改进】【3】使用FasterBlock替换C2f中的Bottleneck的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






