本文主要是介绍含PEMFC的热电联供系统能量管理策略Simulink仿真,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1.光伏发电系统
在直流微电网中,光伏电池系统经过升压DC/DC变换器接入直流微电网提供功率。在不同的系统运行条件下,光伏电池系统有三种工作模式:MPPT 模式、下垂模式和空闲模式。由于光伏阵列的输出特性随着环境条件影响,光伏电池系统一般工作在MPPT模式以提高可再生能源利用率。当蓄电池接近满充或者达到最大充电功率时,直流母线电压 Ubus随之上升,光伏电池系统需要降低输出功率以实现系统功率平衡。当直流微电网工作在晚上或者阴天条件下,光伏电池无法为系统提供功率,此时光伏电池系统切换为空闲模式,在该状态下,燃料电池和蓄电池同时为直流负载提供需求功率。
光伏电池的空载电压与光谱辐照度有关,与电池面积无关。在100MW/cm2的太阳光谱辐照度下,单晶硅光伏电池的空载电压为450——600mV,最高可达690mV。当入射光谱辐照度变化时,光伏电池的空载电压与入射光谱辐照度的对数成正比。环境温度升高时,光伏电池的空载电压将下降,一般温度每升高1℃,Uoc约下降2——3mV。
由上述定义,可列出光伏电池等效电路中各变量的方程式如下:

式中,IO为光伏电池内部等效二极管PN结反向饱和电流,一般为常数;UD为等效二极管端电压;q为电子电荷;k为玻尔兹曼常量;T为热力学温度,A为PN结曲线常数。
光伏电池的伏安特性与光照强度和电池温度有关,可以认为光伏电池的数学物理模型方程以光照强度和电池温度作为参变量。以下是环境因素对光伏电池数学物理模型的修正。
当电池温度T、光照强度S不是参考光照强度和参考电池温度时,必须考虑它们的影响,并需要对光伏电池的数学物理模型进行修正。根据参考光照强度和参考电池温度下的Isc、Uoc、Im和Um,再将它们代入实用表达式,即可得到新的光照强度和新的电池温度下的伏安特性曲线。

2.变流器控制策略
在直流微电网中,光伏电池系统经过升压DC/DC变换器接入直流微电网提供功率。在不同的系统运行条件下,光伏电池系统有三种工作模式:MPPT 模式、下垂模式和空闲模式。由于光伏阵列的输出特性随着环境条件影响,光伏电池系统一般工作在MPPT模式以提高可再生能源利用率。当蓄电池接近满充或者达到最大充电功率时,直流母线电压 Ubus随之上升,光伏电池系统需要降低输出功率以实现系统功率平衡。当直流微电网工作在晚上或者阴天条件下,光伏电池无法为系统提供功率,此时光伏电池系统切换为空闲模式,在该状态下,燃料电池和蓄电池同时为直流负载提供需求功率。
光伏发电系统变流器的控制结构如下图所示:

Simulink模型:

MPPT采用扰动观察法,通过boost电路接入直流母线。

3.PEMFC建模
数学模型
氢储能系统由电解槽EL(electrolyser)、储氢罐 HT(hydrogen tank)和燃料电池 FC(fuel cell)组成,分别实现制氢、储氢和用氢供能。
采用中压储氢罐储氢,t时刻储氢罐内气体压强与储氢量有关,用理想气体方程计算为:

式中:TH2为氢气温度;VHT为储氢罐体积;nHT(t-1)为t-1 时刻罐内氢气量。储氢罐储氢状态可计算为:
![]()
氢储能系统运行特性:

Simulink模型
PEMFC模型及其过流保护模型如下:

4.蓄电池建模
在直流微电网中,蓄电池组在维持系统功率平衡和母线电压稳定中发挥着重要作用。本节采用下垂控制方法实现蓄电池组的自动充放电管理以及维持母线电压稳定。下垂控制方法的控制框图如图所示:

蓄电池对应的恒流模式、恒压模式以及放电模式控制策略如下:

5.逆变器控制策略
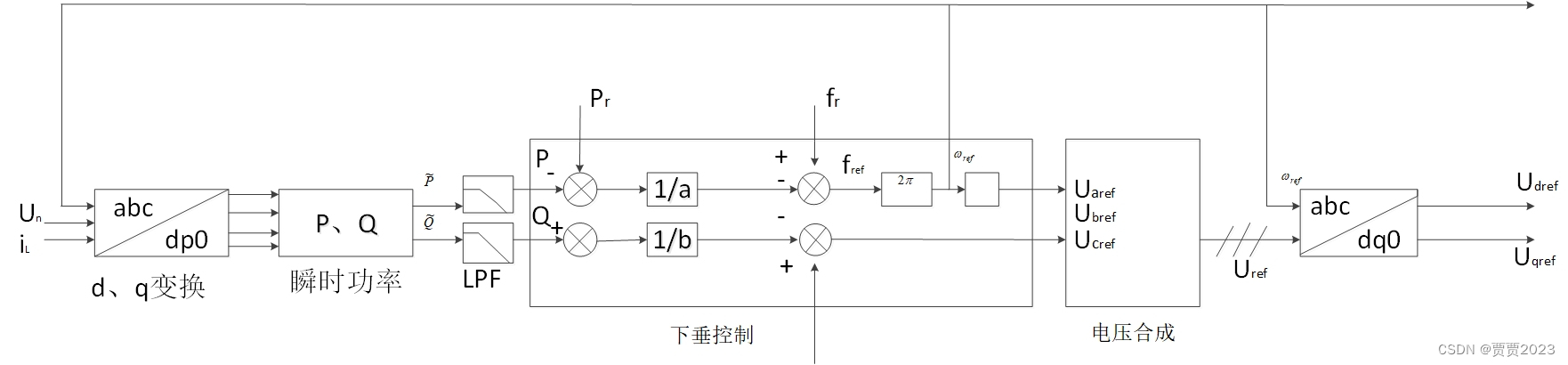
模拟传统发电机相似的频率一次下垂特性曲线作为微源的控制方式,即分别通过P/f下垂控制和Q/V下垂控制来获取稳定的频率和电压,这种控制方法对微网中的微源输出的有功功率和无功功率分别进行控制。
P-f,Q-U下垂控制框图如下:

Droop控制功率环结构框图如下所示:
仿真模型分享
具体可见:含质子交换膜燃料电池(PEMFC)的热电联供系统能量管理策略Simulink仿真
这篇关于含PEMFC的热电联供系统能量管理策略Simulink仿真的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







