本文主要是介绍视角与焦距,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
视角与焦距关系
视角与焦距之间存在密切的关系。在摄影和摄像领域,这两个概念都非常重要。
视角是指相机镜头所能覆盖的视野范围,通常以度数来表示。焦距则是从镜头到成像平面的距离,决定了拍摄的物体在成像平面上的大小。
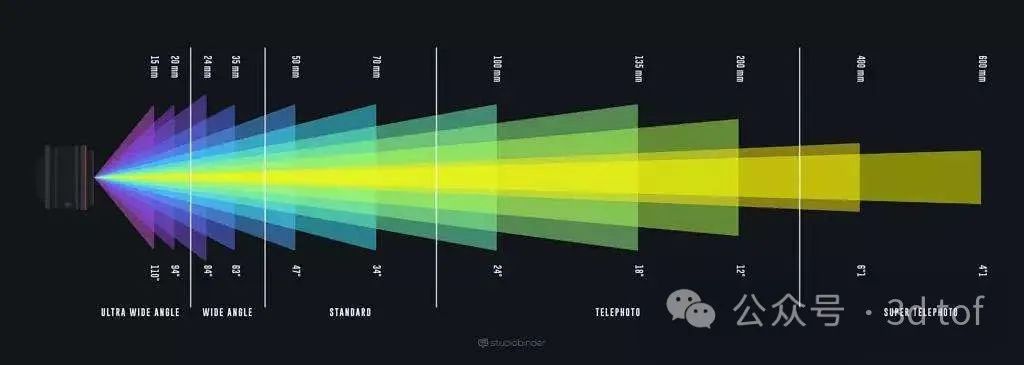
焦距越短,视角就越大,拍到的画面就越宽广;焦距越长,视角就越小,拍到的画面就比较窄,拍摄到的元素就越少。这是因为短焦距镜头具有更宽的视角,能够捕捉到更多的画面,而长焦距镜头则具有更窄的视角,能够放大远处的物体。
例如,广角镜头的焦距较短,视角较大,适合拍摄风景或大型场景;而长焦镜头的焦距较长,视角较小,适合拍摄远处的物体或进行人像特写。
因此,在拍摄时,可以根据需要选择合适的焦距和视角来呈现不同的画面效果。
焦距计算
焦距是光学系统中衡量光的聚集或发散的度量方式,指从透镜的光心到光聚集之焦点的距离。亦是照相机中,从镜片中心到底片或CCD等成像平面的距离。具有短焦距的光学系统比长焦距的光学系统有更佳聚集光的能力。
对于在空气中厚度为d,曲率半径为R1和R2的透镜,有效焦距为:
1/f=(n-1)[1/R₁-1/R₂+(n-1)d/nR₁R₂]<这篇关于视角与焦距的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






