本文主要是介绍矿山无人驾驶方案,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
矿山无人驾驶运输系统,可实现露天矿采煤装载运输的无人化,满足智能矿山安全、高效、绿色、环保等目标。
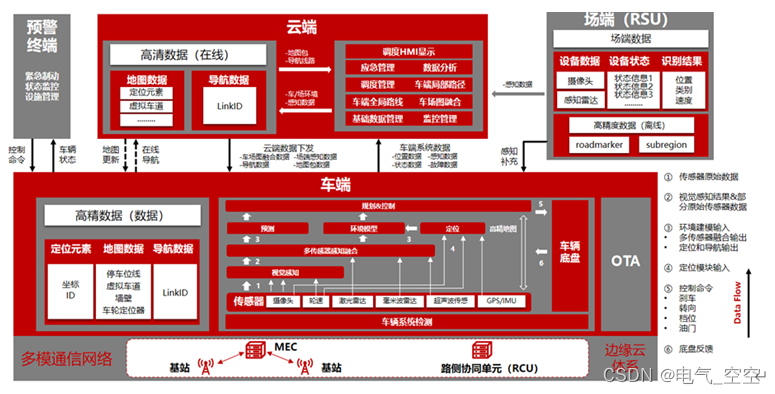
无人驾驶应用的总体技术架构包括“车端、场端、云端”三个层面以及相应的安全保障体系,其中车端的智能矿卡具备车辆感知、通信、决策和执行等能力,与其他设施之间基于5G、C-V2X多模车联网实现通讯传输,云端的调度管理平台具备协同控制、路径规划等能力,场端高精度传感设备与相应的安全保障体系共同确保智能矿卡无人驾驶应用能够安全可靠运行。
智能矿卡包括车体和车载智能化设备,智能化设备包括5G/C-V2X通信终端、摄像头、激光雷达、毫米波雷达、车载定位、车载计算平台等设备,能够实现信息传输、环境感知和智能决策等功能,例如,摄像头、激光雷达等传感设备能够进行环境融合感知,并完成障碍物检测,而车载高精度定位系统则采用融合定位方法以满足不同环境下的定位需求。
车联网基于5G和C-V2X系统实现车与车、车与路、车与云平台的信息传输。5G系统包括基站、核心网等部分,支持实现车和云平台之间控制数据、状态数据的传输。V2X直连通信主要实现车与车之间、车与路之间关于车辆状态、道路状态等数据的传输。
云平台实现矿山运输场景信息的融合分析,构建矿山运输作业模型,面向不同应用场景提供作业调度、路径规划、联合决策和协同控制,可以实现自动驾驶的业务管理,同时作为应用总入口,承接各类信息回传和指令下发,并为业务规划网络路径。
这篇关于矿山无人驾驶方案的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







