本文主要是介绍Java学习苦旅(二十)——七大排序(JAVA代码),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
本篇博客将详细讲解排序。
文章目录
- 排序的概念
- 插入排序
- 原理
- 示例代码
- 希尔排序
- 原理
- 示例代码
- 选择排序
- 原理
- 示例代码
- 堆排序
- 原理
- 示例代码
- 冒泡排序
- 原理
- 示例代码
- 快速排序
- 原理
- 示例代码
- 优化快速排序
- 总结
- 归并排序
- 原理
- 示例代码
- 排序总结
- 结尾
排序的概念
排序,就是使一串记录,按照其中的某个或某些关键字的大小,递增或递减的排列起来的操作。平时的上下文中,如果提到排序,通常指的是排升序(非降序)。通常意义上的排序,都是指的原地排序(in place sort)。
两个相等的数据,如果经过排序后,排序算法能保证其相对位置不发生变化,则我们称该算法是具备稳定性的排序算法。
例如:

注意:一个稳定的排序,是可以实现为不稳定的排序。但是一个本身就不稳定的排序,是不可以变成稳定的排序。
插入排序
原理
整个区间被分为有序区间和无序区间,每次选择无序区间的第一个元素,在有序区间内选择合适的位置插入。
示例代码
public static void insertSort(int[] array) {for (int i = 0; i < array.length; i++) {int tmp = array[i];int j = i - 1;for (; j >= 0; j--) {if (array[j] > tmp) {array[j+1] = array[j];} else {break;}}array[j+1] = tmp;}
}
对于插入排序,初始数据越接近有序,时间效率越高。
希尔排序
原理
希尔排序法又称缩小增量法。希尔排序法的基本思想是:先选定一个整数gap,把待排序文件中所有记录分成个组,所有距离为gap的记录分在同一组内,并对每一组内的记录进行排序。然后,减小gap的值,重复上述分组和排序的工作。当到达gap=1时,所有记录在统一组内排好序。
希尔排序是对直接插入排序的优化。
当gap > 1时都是预排序,目的是让数组更接近于有序。当gap == 1时,数组已经接近有序的了,这样就会很快。这样整体而言,可以达到优化的效果。我们实现后可以进行性能测试的对比。
例如:

示例代码
public static void shell(int[] array, int gap) {for (int i = 1; i < array.length; i++) {int tmp = array[i];int j = i - gap;for (; j >= 0; j -= gap) {if (array[j] > tmp) {array[j+gap] = array[j];} else {break;}}//j回退到了小于0的地方array[j+gap] = tmp;}
}public static void shellSort(int[] array) {int gap = array.length;while (gap > 1) {shell(array,gap);gap /= 2;}shell(array,1);//保证最后是一组
}
选择排序
原理
每一次从无序区间选出最大(或最小)的一个元素,存放在无序区间的最后(或最前),直到全部待排序的数据元素排完 。
示例代码
public static void selectSort(int[] array) {for (int i = 0; i < array.length; i++) {for (int j = i+1; j < array.length; j++) {if (array[i] > array[j]) {swap(array,i,j);}}}
}public static void swap(int[] array, int i, int j) {int tmp = array[i];array[i] = array[j];array[j] = tmp;
}
堆排序
原理
基本原理也是选择排序,只是不在使用遍历的方式查找无序区间的最大的数,而是通过堆来选择无序区间的最大的数。
注意: 排升序要建大堆;排降序要建小堆
例如:

示例代码
public static void heapSort(int[] array) {creatHeap(array);int end = array.length-1;while (end > 0) {swap(array,0,end);shiftDown(array,0,end);end--;}
}public static void creatHeap(int[] array) {for (int parent = (array.length-1-1)/2; parent >= 0; parent--) {shiftDown(array,parent,array.length);}
}public static void shiftDown(int[] array, int parent, int len) {int child = 2*parent + 1;while (child < len) {if (child + 1 < len && array[child] < array[child+1]) {child++;}if (array[child] > array[parent]) {swap(array,child,parent);parent = child;child = 2 * parent + 1;} else {break;}}
}
冒泡排序
原理
在无序区间,通过相邻数的比较,将最大的数冒泡到无序区间的最后,持续这个过程,直到数组整体有序。
示例代码
public static void bubbleSort(int[] array) {for (int i = 0; i < array.length-1; i++) {boolean flg = false;for (int j = 0; j < array.length-1-i; j++) {if (array[j] > array[j+1]) {swap(array,j+1,j);flg = true;}}if (flg == false) {break;}}
}
快速排序
原理
-
从待排序区间选择一个数,作为基准值(pivot);
-
Partition: 遍历整个待排序区间,将比基准值小的(可以包含相等的)放到基准值的左边,将比基准值大的(可以包含相等的)放到基准值的右边;
-
采用分治思想,对左右两个小区间按照同样的方式处理,直到小区间的长度 == 1,代表已经有序,或者小区间的长度 == 0,代表没有数据。
partition有两种方法:Hoare法和挖坑法。
Hoare法:

而挖坑法和Hoare法基本一致,只是不再进行交换,而是进行赋值。
示例代码
public static void quickSort(int[] array) {quick(array,0,array.length-1);
}public static void quick(int[] array, int left, int right) {if (left >= right) {return;}//找基准前,我们找到中间大小的值——使用三数取中法int midValIndex = findMidValIndex(array,left,right);swap(array,midValIndex,left);int pivot = partition(array,left,right);//基准quick(array,left,pivot-1);quick(array,pivot+1,right);
}private static int partition(int[] array, int start, int end) {int tmp = array[start];while (start < end) {while (start < end && array[end] >= tmp) {end--;}//end下标遇到了小于tmp的值array[start] = array[end];while (start < end && array[start] <= tmp) {start++;}array[end] = array[start];}array[start] = tmp;return start;
}private static int findMidValIndex(int[] array, int start, int end) {int mid = start + ((end-start) >>> 1);if (array[start] < array[end]) {if (array[start] > array[mid]) {return start;} else if (array[mid] > array[end]) {return end;} else {return mid;}} else {if (array[mid] > array[start]) {return start;} else if (array[mid] < array[end]) {return end;} else {return mid;}}
}
此外,快速排序还可以使用非递归进行实现,代码如下:
public static void quickSort(int[] array) {Stack<Integer> stack = new Stack<>();int left = 0;int right = array.length-1;int pivot = partition(array,left,right);if (pivot > left+1) {stack.push(left);stack.push(pivot-1);}if (pivot < right-1) {stack.push(pivot+1);stack.push(right);}while (!stack.isEmpty()) {right = stack.pop();left = stack.pop();pivot = partition(array,left,right);if (pivot > left+1) {stack.push(left);stack.push(pivot-1);}if (pivot < right-1) {stack.push(pivot+1);stack.push(right);}}
}private static int partition(int[] array, int start, int end) {int tmp = array[start];while (start < end) {while (start < end && array[end] >= tmp) {end--;}//end下标遇到了小于tmp的值array[start] = array[end];while (start < end && array[start] <= tmp) {start++;}array[end] = array[start];}array[start] = tmp;return start;
}
优化快速排序
-
通常使用几数取中法选择基准值
-
partition 过程中把和基准值相等的数也选择出来
-
待排序区间小于一个阈值时(例如 48),使用直接插入排序
代码如下:
public static void quickSort(int[] array) {quick(array,0,array.length-1);
}public static void quick(int[] array, int left, int right) {if (left >= right) {return;}//如果区间内的数据,在排序的过程当中,小于某个范围了,可以直接使用插入排序if (right-left+1 <= 40) {//使用直接插入排序insertSort2(array,left,right);return;}//找基准前,我们找到中间大小的值——使用三数取中法int midValIndex = findMidValIndex(array,left,right);swap(array,midValIndex,left);int pivot = partition(array,left,right);//基准quick(array,left,pivot-1);quick(array,pivot+1,right);
}public static void insertSort2(int[] array, int start, int end) {for (int i = 0; i <= end; i++) {int tmp = array[i];int j = i - 1;for (; j >= start; j--) {if (array[j] > tmp) {array[j+1] = array[j];} else {break;}}//j回退到了小于0的地方array[j+1] = tmp;}
}private static int findMidValIndex(int[] array, int start, int end) {int mid = start + ((end-start) >>> 1);if (array[start] < array[end]) {if (array[start] > array[mid]) {return start;} else if (array[mid] > array[end]) {return end;} else {return mid;}} else {if (array[mid] > array[start]) {return start;} else if (array[mid] < array[end]) {return end;} else {return mid;}}
}private static int partition(int[] array, int start, int end) {int tmp = array[start];while (start < end) {while (start < end && array[end] >= tmp) {end--;}//end下标遇到了小于tmp的值array[start] = array[end];while (start < end && array[start] <= tmp) {start++;}array[end] = array[start];}array[start] = tmp;return start;
}
总结
- 在待排序区间选择一个基准值
-
选择左边或者右边
-
随机选取
-
几数取中法
- 做 partition,使得小的数在左,大的数在右
-
hoare
-
挖坑
-
前后遍历
-
将基准值相等的也选择出来
- 分治处理左右两个小区间,直到小区间数目小于一个阈值,使用插入排序
归并排序
原理
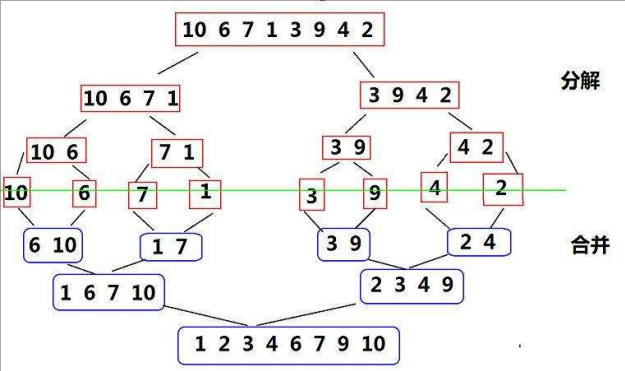
归并排序是建立在归并操作上的一种有效的排序算法,该算法是采用分治法的一个非常典型的应用。将已有序的子序列合并,得到完全有序的序列。即先使每个子序列有序,再使子序列段间有序。若将两个有序表合并成一个有序表,称为二路归并。例如:
示例代码
public static void mergeSort(int[] array) {mergeSortInternal(array,0,array.length-1);
}private static void mergeSortInternal(int[] array, int low, int high) {if (low >= high) {return;}int mid = low + ((high-low) >>> 1);mergeSortInternal(array,low,mid);mergeSortInternal(array,mid+1,high);merge(array,low,mid,high);
}private static void merge(int[] array, int low, int mid, int high) {int s1 = low;int e1 = mid;int s2 = mid+1;int e2 = high;int[] tmp = new int[high-low+1];int k = 0;while (s1 <= e1 && s2 <= e2) {if (array[s1] <= array[s2]) {tmp[k++] = array[s1++];} else {tmp[k++] = array[s2++];}}while (s1 <= e1) {tmp[k++] = array[s1++];}while (s2 <= e2) {tmp[k++] = array[s2++];}//拷贝tmp数组元素,放到原来的数组array中for (int i = 0; i < k; i++) {array[i+low] = tmp[i];}
}
此外,可以使用非递归的方法实现归并排序,代码如下:
public static void mergeSort(int[] array) {int num = 1;//每组的数据个数while (num < array.length) {for (int i = 0; i < array.length; i++) {int left = i;int mid = left+num-1;if (mid >= array.length) {mid = array.length-1;}int right = mid+num;if (right >= array.length-1) {right = array.length-1;}merge(array,left,mid,right);}num *= 2;}
}
排序总结
| 排序方法 | 最好 | 平均 | 最坏 | 空间复杂度 | 稳定性 |
|---|---|---|---|---|---|
| 插入排序 | O(N) | O(N2) | O(N2) | O(1) | 稳定 |
| 希尔排序 | O(N1.3) | O(N1.3) ~ O(N1.5) | O(N1.5) | O(1) | 不稳定 |
| 选择排序 | O(N2) | O(N2) | O(N2) | O(1) | 不稳定 |
| 堆排序 | O(N*log(N)) | O(N*log(N)) | O(N*log(N)) | O(1) | 不稳定 |
| 冒泡排序 | O(N) | O(N2) | O(N2) | O(1) | 稳定 |
| 快速排序 | O(N*log(N)) | O(N*log(N)) | O(N2) | O(log(N)) ~ O(N) | 不稳定 |
| 归并排序 | O(N*log(N)) | O(N*log(N)) | O(N*log(N)) | O(N) | 稳定 |
注意:
希尔排序的时间复杂度与增量有关。
结尾
本篇博客到此结束。
上一篇博客:Java学习苦旅(十九)——详解Java的堆和优先级队列
下一篇博客:Java学习苦旅(二十一)——泛型
这篇关于Java学习苦旅(二十)——七大排序(JAVA代码)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





