本文主要是介绍2023年 beagle bone black教程5-CAN的使用,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
beagle bone black教程5-CAN的使用
- 1 引脚配置
- 2 终端启动can
- 3 CAN通信测试
- 4 CAN通信编程
- 5 CAN通信编程+POLL
友情提示:本教程述基于 Debian 9.x 版本或者10.x。它已经包含了 CANBUS 和 CAN-Tools 集合的内核驱动程序。 但重要的是,beaglebone的ubboot-Bootloader也更新到该版本的当前版本。( 如何更新 uboot.)当安装了旧版本的"uboot"时,"配置针"命令不起作用。
1 引脚配置
首先,查看引脚功能
cd /lib/firmware
ls BB-CAN*

我们查看CAN0
cat BB-CAN0-00A0.dtbo

如图所示,P9.19和P9.20为我们所用的CAN0。
但是这里只是描述,我们需要真正地把该引脚配置为相应功能(其他外设也如此)
config-pin <pin> <filename> #配置引脚为对应filename的功能
config-pin -l <pin># 查询引脚支持的模式
config-pin -q <pin> #查看引脚目前配置模式

我们配置一下。
sudo config-pin p9.19 can #配置p9.19为can
config-pin -q p9.19 #查询p9.19
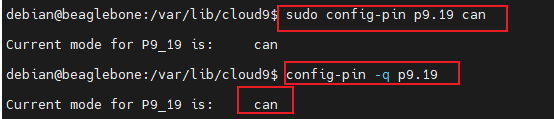
可以看到成功配置。值得一提的是,这个配置,每次上电都需要重新配置
下面介绍一劳永逸的办法。
通过 systemd 在引导时启动的配置脚本来完成上电初始化
配置脚本是通过以下方式生成的:
在此脚本中,可以添加所有必需的 IO 引脚。对于本节需求,只有p9.19和p9.20需要配置(后边想加什么自己加),所以新建并打开脚本:
sudo nano /usr/bin/config_pins.sh
添加下边语句:
#!/bin/bash
config-pin p9.19 can
config-pin p9.20 can
通过以下方式使脚本具备可执行权限:sudo chmod a+x /usr/bin/config_pins.sh

设置服务配置:
sudo nano /lib/systemd/system/config_pins.service
输入下边语句。
[Unit]
Description=Enable pin configuration at startup
After=generic-board-startup.service
[Service]
Type=simple
ExecStart=/usr/bin/config_pins.sh
[Install]
WantedBy=multi-user.target
激活新服务:
sudo systemctl daemon-reload
sudo systemctl enable config_pins.service
 重启系统
重启系统
sudo reboot #重启
重新启动后,检查服务的状态:
sudo systemctl status config_pins.service
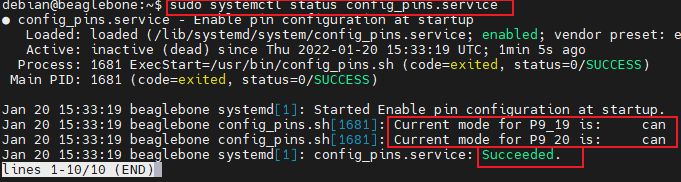
如图,说明服务成功运行。
为了保险,我们再查看一下引脚配置。
config-pin -q p9.19
config-pin -q p9.20
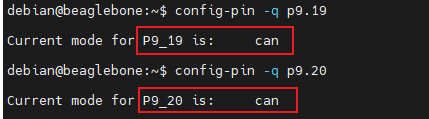
nice!!!!
2 终端启动can
将CAN0总线速度配置为1000kbps(用其他也行,保持一致即可)。
sudo ip link set can0 up type can bitrate 1000000
启动CAN0
sudo ifconfig can0 up

没有提示,我们用ifconfig 来看一下。
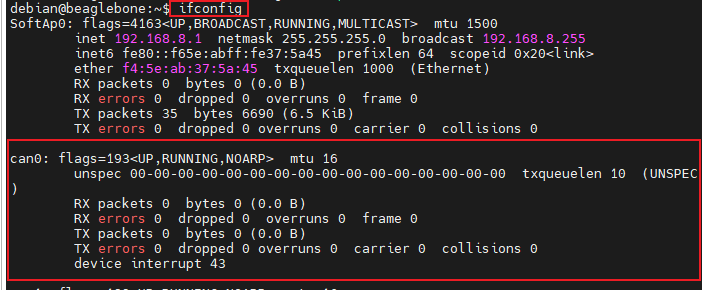 ok,没有问题。
ok,没有问题。
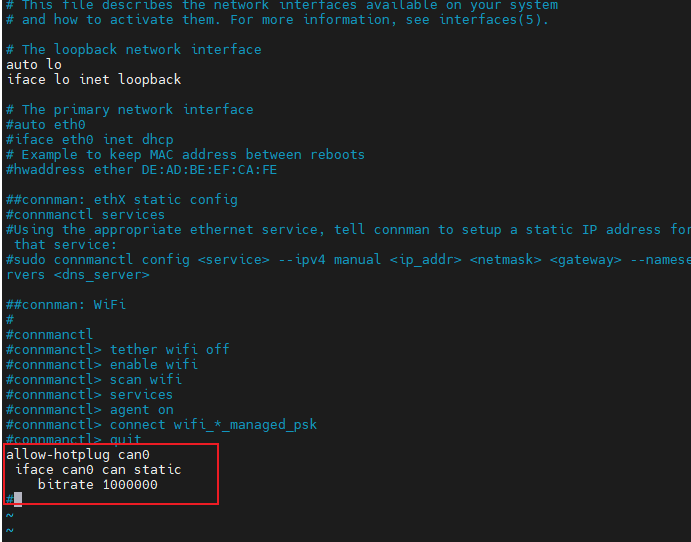
为了让can服务直接开机启动,可以去配置**/etc/network/interfaces**
sudo vim /etc/network/interfaces
添加如下语句
allow-hotplug can0 iface can0 can static bitrate 1000000
3 CAN通信测试
需要说明的是,beaglebone 的板子上的CAN引脚,需要外部添加CAN电平转换芯片才真正变成CAN信号。
CAN通信可以使用 can-utils 集合中的 CANSend 和 CanDump函数。
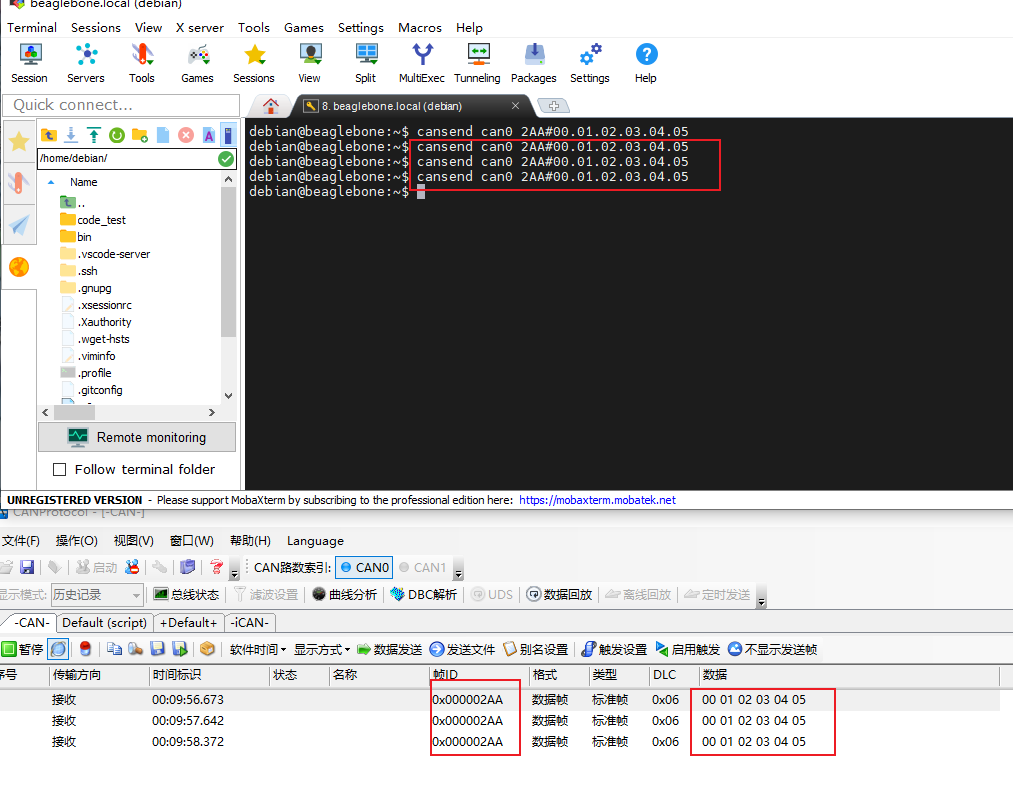
CAN0发送数据:设置地址为0x2AA,数据为0x01 0x02 0x03 0x04 0x05(最多8个)。如下:
cansend can0 2AA#00.01.02.03.04.05
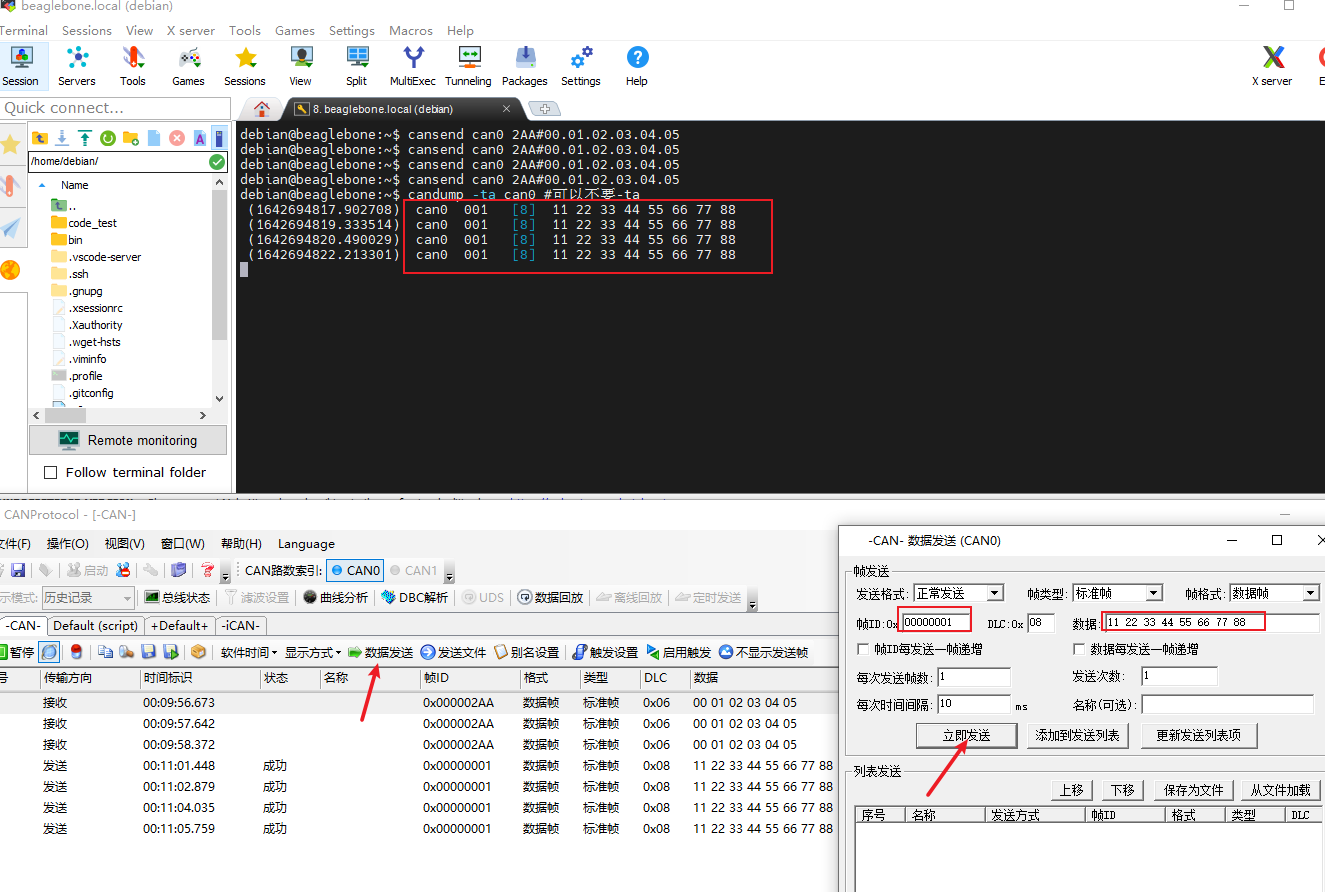
要在 CAN 总线上接收消息,使用下边命令,它会阻塞地接收数据
candump -ta can0 #可以不要-ta
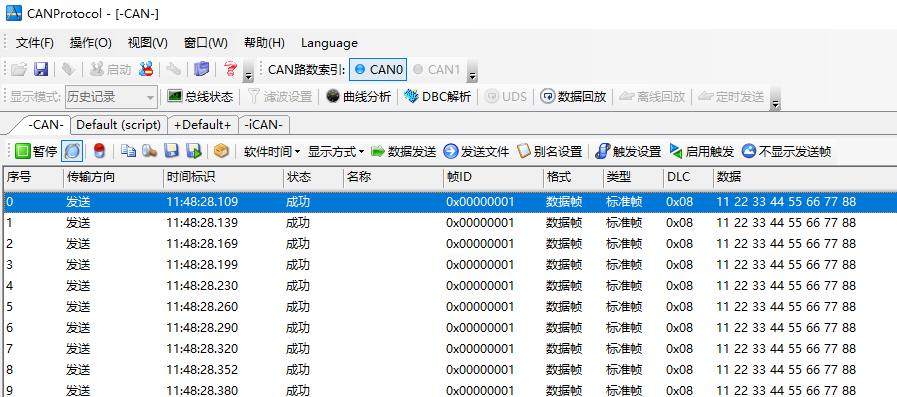
如图为用一块板子发送,使用电脑的上位机进行接收(CAN上位机很多,CANalyst、CANtest之类的)
测试接收,使用电脑发送、
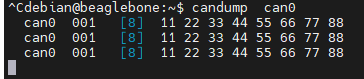
candump -ta can0 #可以不要-ta,就不显示时间
ok,nice!!
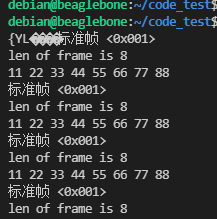
接收如果没有-ta,则为下图的样子。
4 CAN通信编程
直接看代码
#include <stdlib.h>
#include <stdio.h>#include <string.h>
#include <unistd.h>#include <net/if.h>
#include <sys/ioctl.h>
#include <sys/socket.h>
#include <linux/can.h>
#include <linux/can/raw.h>
#include <poll.h>
#include <pthread.h>
int sockfd;//can的文件描述符static void can0_init(void)
{//下边若权限不够则开头添加sudosystem("sudo ifconfig can0 down ");//先关闭 can0 设备system("sudo ip link set can0 up type can bitrate 1000000");//设置波特率为 1000000system("sudo ifconfig can0 up");//启动can0sleep(1);sockfd=socket(PF_CAN,SOCK_RAW,CAN_RAW);if(sockfd<0) perror("socket error");/******************将套接字与 CAN 设备进行绑定********************************/struct ifreq ifr={0};struct sockaddr_can can_addr={};//指定can0设备strcpy(ifr.ifr_name,"can0");ioctl(sockfd,SIOCGIFINDEX,&ifr);can_addr.can_family=AF_CAN;//填充数据can_addr.can_ifindex=ifr.ifr_ifindex;int ret=bind(sockfd,(struct sockaddr *)&can_addr,sizeof(can_addr)); //绑定 if(ret<0) perror("bind error");}static void thread_can_start(void)
{can0_init();sleep(1);while(1){struct can_frame frame;int ret=read(sockfd,&frame,sizeof(struct can_frame));//这里好像有堵塞效果if(ret==-1) perror("read error");if(frame.can_id&CAN_ERR_FLAG) printf("Error frame!!\r\n");if(frame.can_id&CAN_SFF_MASK) //CAN接收到了数据,并且是标准帧{printf("标准帧 <0x%03x>\r\n",frame.can_id&CAN_SFF_MASK);printf("len of frame is %d\r\n",frame.can_dlc);for(int i = 0; i < frame.can_dlc; i++)printf("%02x ",frame.data[i]);printf("\r\n");} }}int main (void)
{pthread_t tid_can;pthread_create(&tid_can, NULL, (void *)thread_can_start, NULL);//创建CAN接收线程while(1){/**************************数据接受***************************************/sleep(1);struct can_frame frame;frame.can_id =123;//id frame.can_dlc=4;//长度frame.data[0]=0xA0;//数据frame.data[1]=0xB0;frame.data[2]=0xC0;int ret=write(sockfd,&frame,sizeof(frame));//CAN每隔1s发送一次 if(ret!=sizeof(frame)) perror("write error");}
}
gcc -o can_thread can_thread.c -lpthread %编译./can_thread
只使用线程的话,目前有两个问题:偶尔死掉,并且开头会接收一帧乱码。因此下边试试添加POLL
没有问题
5 CAN通信编程+POLL
#include <stdlib.h>
#include <stdio.h>#include <string.h>
#include <unistd.h>#include <net/if.h>
#include <sys/ioctl.h>
#include <sys/socket.h>
#include <linux/can.h>
#include <linux/can/raw.h>
#include <poll.h>
#include <pthread.h>
int sockfd;//can的文件描述符static void can0_init(void)
{//下边若权限不够则开头添加sudosystem("sudo ifconfig can0 down ");//先关闭 can0 设备system("sudo ip link set can0 up type can bitrate 1000000");//设置波特率为 1000000system("sudo ifconfig can0 up");//启动can0sleep(1);sockfd=socket(PF_CAN,SOCK_RAW,CAN_RAW);if(sockfd<0) perror("socket error");/******************将套接字与 CAN 设备进行绑定********************************/struct ifreq ifr={0};struct sockaddr_can can_addr={};//指定can0设备strcpy(ifr.ifr_name,"can0");ioctl(sockfd,SIOCGIFINDEX,&ifr);can_addr.can_family=AF_CAN;//填充数据can_addr.can_ifindex=ifr.ifr_ifindex;int ret=bind(sockfd,(struct sockaddr *)&can_addr,sizeof(can_addr)); //绑定 if(ret<0) perror("bind error");}static void thread_can_start(void)
{struct pollfd fds; fds.fd=sockfd; //canfds.events=POLLIN; fds.revents=0;//while(1){int ret=poll(&fds,1,-1);//2 表示fds里元素个数为1 -1为一直阻塞if(ret<0) perror("poll error");if(fds.revents & POLLIN){//有数据struct can_frame frame;int ret=read(sockfd,&frame,sizeof( struct can_frame));//这里也有阻塞效果if(ret==-1) perror("read error");if(frame.can_id&CAN_ERR_FLAG) printf("Error frame!!\r\n");if(frame.can_id&CAN_SFF_MASK) printf("标准帧 <0x%03x>\r\n",frame.can_id&CAN_SFF_MASK);printf("len of frame is %d\r\n",frame.can_dlc);for(int i = 0; i < frame.can_dlc; i++)printf("%02x ",frame.data[i]);printf("\r\n");}}
}
int main (void)
{can0_init();pthread_t tid_can;pthread_create(&tid_can, NULL, (void *)thread_can_start, NULL);//创建can接收线程 while(1){/**************************数据接受***************************************/sleep(1);struct can_frame frame;frame.can_id =0x123;//id of frameframe.can_dlc=3;//len of frame is 3 bytesframe.data[0]=0xA0;//dataframe.data[1]=0xB0;frame.data[2]=0xC0;int ret=write(sockfd,&frame,sizeof(frame));//write frameif(ret!=sizeof(frame)) perror("write error");} }
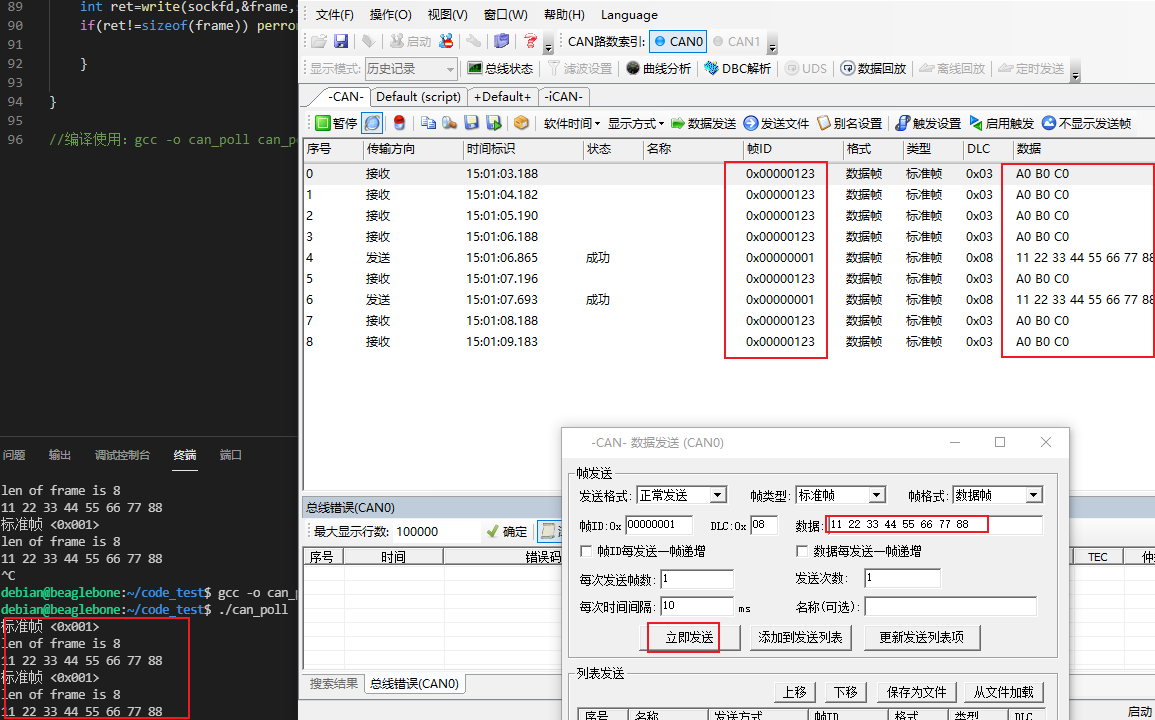
//编译使用:gcc -o can_poll can_poll.c -lpthread
运行:程序往can发送A0 B0 C0 ,然后程序收到can数据到终端里。如图,没有问题。
这篇关于2023年 beagle bone black教程5-CAN的使用的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






