本文主要是介绍HoudiniVex笔记_P13_TrigonometryBasics三角函数,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
原视频:https://www.youtube.com/playlist?list=PLzRzqTjuGIDhiXsP0hN3qBxAZ6lkVfGDI
Bili:Houdini最强VEX算法教程 - VEX for Algorithmic Design_哔哩哔哩_bilibili
Houdini版本:19.5
1、度和弧度
角度的两种表达方式:度【°】和弧度【π】。
在Houdini里的大多数情况下,需要将角度转换成弧度进行计算。
π=180°≈3.14=圆周长/直径。
eg.可使用类型为detail的attributeWrangle节点验证以下代码:
float degrees = chf('degrees');
float radians = chf('radians') * PI * 2.0;;f@radians = radians(degrees); //若degrees=180,则radians≈3.14159
f@degrees = degrees(radians); //若radians=1,则degrees=360
f@pi= PI; // pi ≈ 3.142、π计算
略
3、正弦sin、余弦cos、正切tan
如下图所示,在单位为1的圆内,正弦sinθ = b,余弦cosθ = c,正切tanθ = b/c,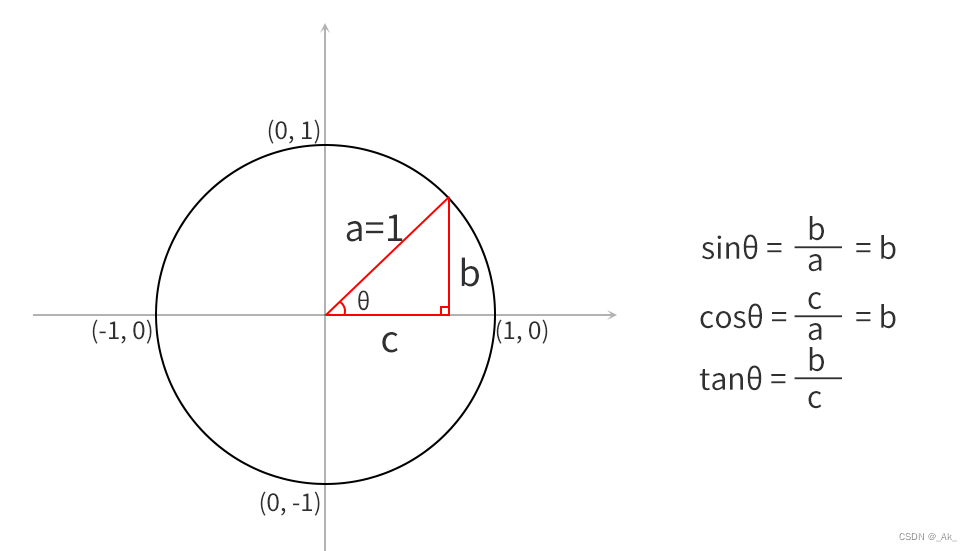
4、三角函数可视化
eg.①首先搞条z轴旋转45°的直线/Transform节点的旋转z轴(方便理解)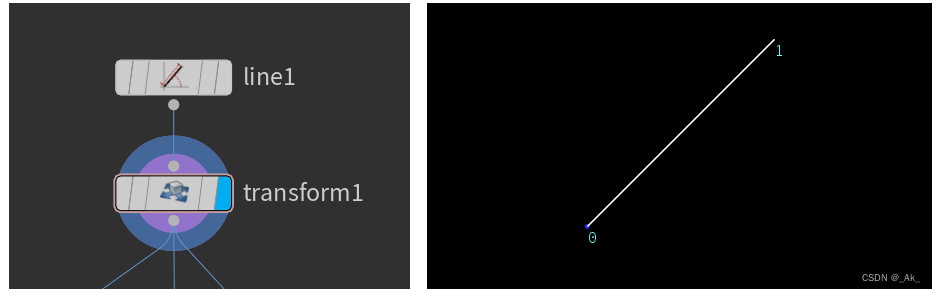
②以这条线为直角三角形的斜边,创建另外两条边,并设置detail属性,分别在PointWrangle中输入代码: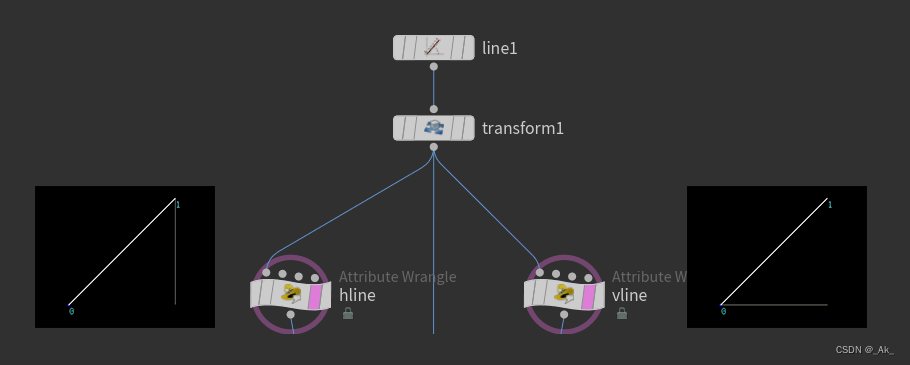
//PointWrangle节点hline
if(@ptnum == 1){@P.y = 0.0;setdetailattrib(0, 'c', @P.x);
}//PointWrangle节点vline
if(@ptnum == 0){vector npos = point(0, 'P', 1);@P.x = npos.x;
}if(@ptnum == 1){setdetailattrib(0, 'b', @P.y);
}③合并三条边之前,先用测量节点measure确定斜边的长,以及用attribpromote节点把斜边长度转为detail属性:
④三边合并,并添加一个以斜边为半径的圆合并:
其中圆的半径引用斜边的长度【复制—粘贴参数引用】,
⑤最后在,mergre下添加一个类型为detail的AttributeWrangle节点,写入以下代码:
float rad = chf('rad'); //自定义半径
float ang = radians(chf('ang')); //自定义角度float a = f@a; //高度
float b = f@b; //宽度
float c = f@c; //斜边f@sinval = b/a;
f@cosval = c/a;
f@tanval = b/c;f@sinval2 = sin(ang);
f@cosval2 = cos(ang);
f@tanvla2 = tan(ang);f@b2 = sin(ang) * a;
f@c2 = cos(ang) * a;其中,自定义半径<——斜线【复制—粘贴参数引用】、自定义角度<——Transform节点的旋转z轴【复制—粘贴参数引用】,
结果:略
5、练习1——画圈圈
eg.利用sin、cos函数画圈圈。在类型为detail的attributeWrangle节点写入以下代码:
int num = chi('num');
float rad = chf('rad');for(int i =0; i<num; i++){float ang = 2.0 * $PI / num * i; //角度递增,最大为360°float x = cos(ang) * rad;float y = sin(ang) * rad;vector pos = set(x, y, 0);int pt = addpoint(0, pos);
} //结果如下:
6、练习2——画转圈圈
先上结果:小球从最左点开始绕圈圈运动。
操作:
类型为Points的AttributeWrangle节点(命名为oribt)写入以下代码:
float ang = radians(chf('ang')); //角度、范围设为0~360
float rad = chf('rad'); //半径、大小随意float x = cos(ang) * rad; //x坐标
float y = sin(ang) * rad; //y坐标@P = set(x, y, 0);其它设置:add节点(添加1个点)、sphere节点(polygon、缩小)、circle3节点的缩放<——oribt节点的半径通道rad【复制—粘贴参数引用】、oribt节点的角度通道Ang写成【$FF / $FEND * 360】。
7、练习3——画大波浪
大概就是利用三角函数画出它们的坐标图。
eg.在类型为detail的attributeWrangle节点写入以下代码:
int num = chi('num');
int switch = chi('switch'); //根据输入的数字,切换不同三角函数计算方式for(int i=0; i<num; i++){float ang = $PI * 2.0 *i / num * chf('wavenum'); //起伏幅度次数,即角度大小float x = ang;float y = 0.0;if(switch == 0){y = sin(ang);}else if(switch == 1){y = cos(ang);}else if(switch == 2){y = tan(ang);}vector pos = set(x, y, 0.0);int pt = addpoint(0, pos);
} 结果大概是类似下面这种样子:
8、练习4——沿着大波浪动
eg.如下图添加节点,其中add节点(添加一个点)、animate_wave节点(points类型),
在animate_wave中输入以下代码:
float ang = radians(chf('ang')); //设置范围0~360float x = ang; //若x=0,小球将上下运动
float y = sin(ang);@P = set(x, y, 0);其中,在通道角度ang中输入【$FF / $FEND * 360 * 2.0】(2.0为自定义倍速)
结果为:小球运动规律符合sin函数规律。
9、三角函数值范围
如下图所示,图片来自@门酱胡安,图一为sin、cos函数图像,第二章为tan函数图像。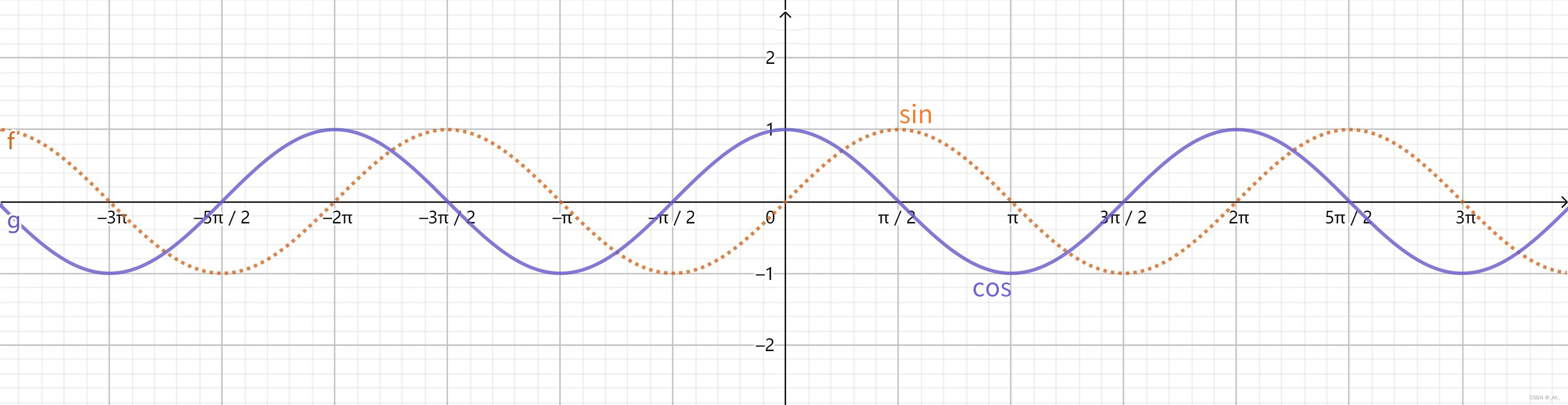

如若不懂,可以结合【3、正弦sin、余弦cos、正切tan】的图像去理解。
10、练习5——动态缩放
eg.Sphere小球节点(polygon)、PointWrangle节点,并写入以下代码:
float val = cos($PI * 2.0 * @Frame / $FEND * 2); // *2仅是让小球缩放快些val = fit(val, -1.0, 1.0, 0.1, 1.0); //映射函数,把val值(-1.0, 1.0),映射到(0.1, 1.0)@P *= val;结果:小球缩放规律类似cos函数
11、反三角函数
这里大概看看就好,深入了解可以看这篇文章的推导过程。
常用的另外三个三角函数:
cot余切=1/正切=邻边/对边,
sec正割=1/余弦=斜边/邻边,
csc余割=1/正弦=斜边/对边。
反三角函数:反正弦arcsin、反余弦arccos、反正切arctanx。可以理解为将原三角函数的x、y调换位置所得,如图所示,

反函数的导数等于直接函数的导数的倒数: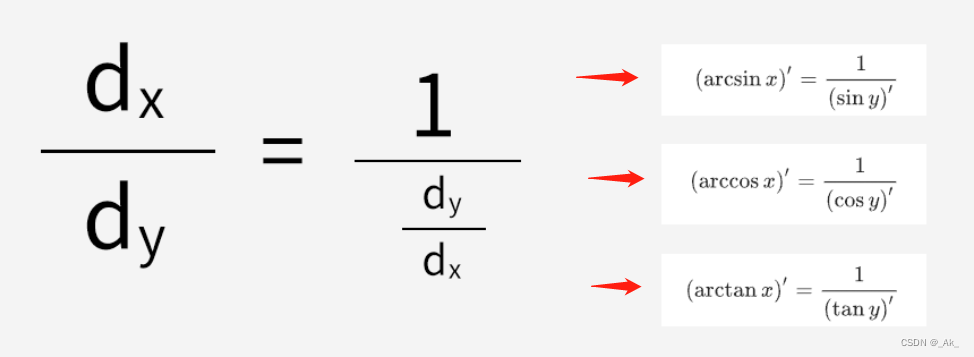
eg、可以在类型为detail的attributeWrangle节点写入以下代码,并结合前面代码验证另外三个三角函数结果:
//余割、余切、正割
float ang = radians(chf('ang'));f@cosecant = 1.0 / sin(ang);
f@secant = 1.0 / cos(ang);
f@cotangent = 1.0 / tan(ang);12、使用反三角函数获取角度
使用反三角函数估算角度,多少有点不完美,使用 atan2() 函数完美解决。
eg.直接使用【4、三角函数可视化】的案例,仅对最后的attributeWrangle节点的代码进行修改,
float rad = chf('rad'); //自定义半径
float ang = radians(chf('ang')); //自定义角度float a = f@a; //高度
float b = f@b; //宽度
float c = f@c; //斜边f@sinval = b/a;
f@cosval = c/a;
f@tanval = b/c;f@sineang = degrees(asin(f@sinval)); //当角度位于180°~270°~360°时,得到的角度值从0°开始到-90°再到0°
f@cosang = degrees(acos(f@cosval)); //当角度位于180°~270°~360°时,得到的角度值为180°~0°
f@tanang = degrees(atan(f@tanval)); //当角度位于90°~270°、270°~360°时,得到的角度值为-90°~90°,-90°~0°//用Houdini自带的atan2()函数完美解决角度估算问题
// atan2() 函数仅需要x、y值(两条直角边)
f@tanang2 = degrees(atan2(b, c)); 结果:略
13、练习6——两向量角度
理论:如下图所示,求向量A、B的夹角角度。
①对向量A进行归一化,利用点积求得边长a的值;
②勾股定理,a²+b²=c²,求得b值(c²=x²+y²+z²);
③反函数atan2()求得角度θ。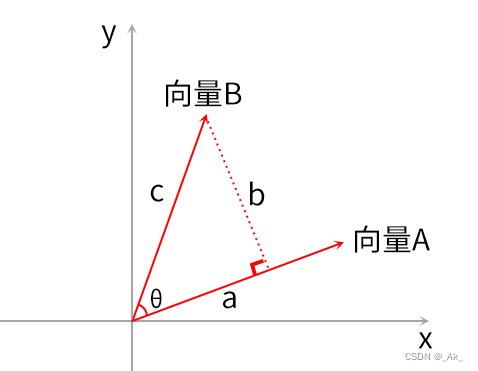
eg.按下图设置创建两条直线,通道参数可直接拖拽创建:通道与直线的旋转【复制—粘贴参数引用】,当然也可以对直线直接设定恒定旋转值,以验证结果。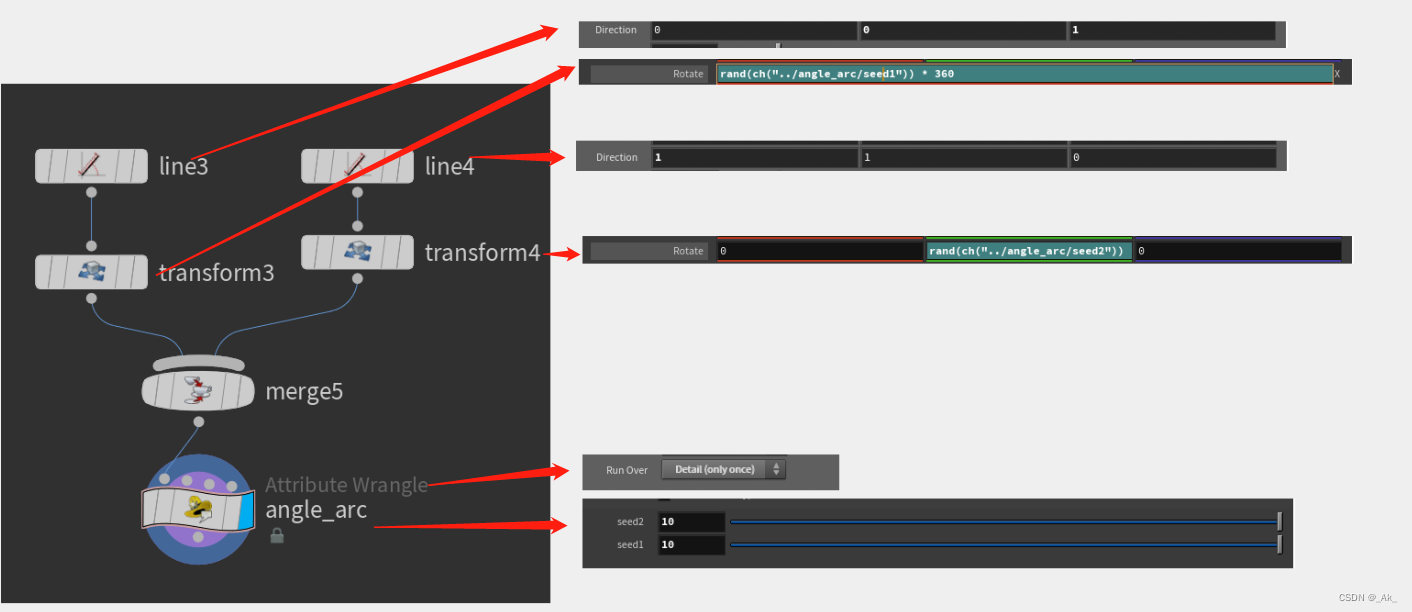
在angle_arc输入以下代码:
//根据直线首末两个顶点坐标,获取向量值
int pts1[] = primpoints(0, 0);
int pt11 = pts1[0];
int pt12 = pts1[1];
vector pos11 = point(0, 'P', pt11);
vector pos12 = point(0, 'P', pt12);
vector dir1 = pos12 - pos11; //根据直线首末两个顶点坐标,获取向量值
int pts2[] = primpoints(0, 1);
int pt21 = pts2[0];
int pt22 = pts2[1];
vector pos21 = point(0, 'P', pt21);
vector pos22 = point(0, 'P', pt22);
vector dir2 = pos22 - pos21;float dot = dot(normalize(dir1), dir2); //根据点积,求得a值
float vlen = length(dir2); //向量B的长度
float h = sqrt(pow(vlen, 2) - pow(dot, 2)); //勾股定理,求得b值float ang = atan2(h, dot); //反三角函数,求得角度f@ang = degrees(ang); //两个向量之间的夹角结果:略
14、练习——两向量之间画弧
理论:①根据叉乘,可以得到两个向量的垂直向量,即法线向量,暂且将其定为(虚假的)Z轴;
②把其中一个向量作为(虚假)的X轴,与Z轴求得(虚假的)Y轴;
③(虚假)X、(虚假)Y轴所构成的平面就是两个向量之间构成的平面;用三角函数sin、cos即可求得生成点在(虚假)X轴、(虚假)Y轴上的坐标。
直接使用【13、Exercise练习6——两向量角度】的项目,对代码进行修改为,
//根据直线首末两个顶点坐标,获取向量值
int pts1[] = primpoints(0, 0);
int pt11 = pts1[0];
int pt12 = pts1[1];
vector pos11 = point(0, 'P', pt11);
vector pos12 = point(0, 'P', pt12);
vector dir1 = pos12 - pos11; //根据直线首末两个顶点坐标,获取向量值
int pts2[] = primpoints(0, 1);
int pt21 = pts2[0];
int pt22 = pts2[1];
vector pos21 = point(0, 'P', pt21);
vector pos22 = point(0, 'P', pt22);
vector dir2 = pos22 - pos21;float dot = dot(normalize(dir1), dir2); //根据点积,求得a值
float vlen = length(dir2); //向量B的长度
float h = sqrt(pow(vlen, 2) - pow(dot, 2)); //勾股定理,求得b值float ang = atan2(h, dot); //反三角函数,求得角度f@ang = degrees(ang); //两个向量之间的夹角//上面代码与前面相同//画弧
vector xaxis = normalize(dir1); //其中之一的向量归一化,虚假的X轴
vector zaxis = normalize(cross(xaxis, normalize(dir2))); //两个向量的垂直向量,即法线向量,虚假的Z轴
vector yaxis = normalize(cross(zaxis, xaxis)); //虚假的Y轴int num = chi('num');
for(int i=0; i<num; i++){float sang = ang * i / (num - 1.0); //对两个向量之间的夹角进行细分float x = cos(sang); //生成点的宽度,即直角三角形的宽度边float y = sin(sang); //生成点的高度,即直角三角形的高度边vector tx = xaxis * x; //生成点在(虚假X轴)方向的宽度/坐标vector ty = yaxis * y; //生成点在(虚假Y轴)方向的高度/坐标//为什么没Z轴?因为我们是以(假)X轴和(假)Y轴为平面,生成弧度点vector tpos = tx + ty; // "X"、"Y"轴的坐标相加,得到具体位置int pt = addpoint(0, tpos);
}结果大概是这个样子:
这篇关于HoudiniVex笔记_P13_TrigonometryBasics三角函数的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







