本文主要是介绍填充点云孔洞(较大的洞)halcon算法,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
前言
很多时候,一些小洞可以通过平滑算法,或者三角化算法的参数调整,即可对较小的孔洞进行填充,但是较大的洞却很难通过上面的算法进行填充。
下面介绍一种填充孔洞的思路:
步骤一:对点云进行滤波处理,找到孔洞所在平面
本文为了更直观的进行讲解,去掉了去除噪声和滤波等操作,自己根据自己点云的情况进行相关操作,获取目标点云。
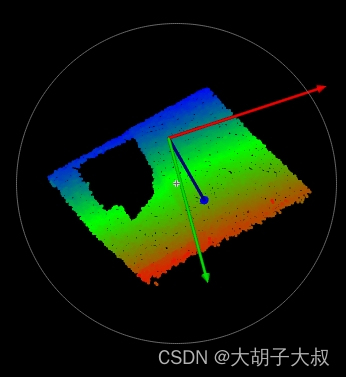
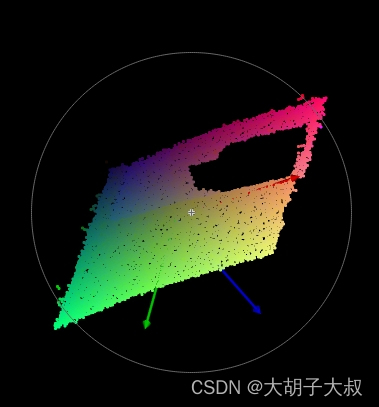
步骤二:对点云进行旋转,使孔洞可以投射到一个规则的面上
如xy平面上,或者自己倾向的某个平面都可以,在pcl中可以自己生成平面,并向该平面进行投影操作。
步骤三:对孔洞所在面进行投影操作,使之变成二维图
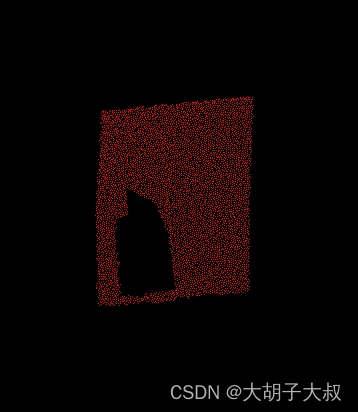
步骤四:对二维图进行分析,用fill_up和difference 即可得到孔洞的位置
这篇关于填充点云孔洞(较大的洞)halcon算法的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








