本文主要是介绍ACES 增强版不丹水稻作物地图(2016-2022 年),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
ACES 增强版不丹水稻作物地图(2016-2022 年)¶
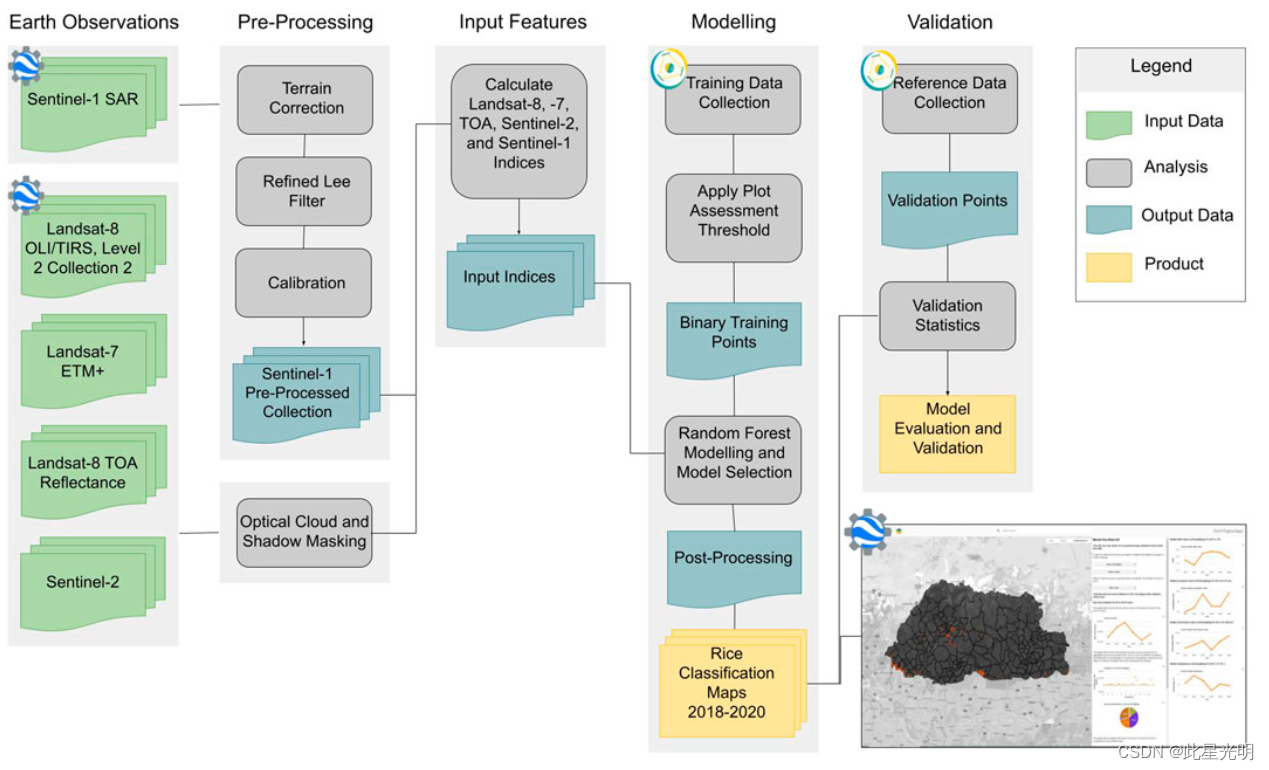
用于改善粮食安全决策的 2016-2022 年年度作物类型稻米地图仍然是不丹的一项挑战。这些地图是与不丹农业部和 SERVIR 合作开发的。通过专注于发展不丹的科学、技术、工程和数学 (STEM),我们共同开发了名为农业分类和估算服务 (ACES) 的地理空间应用程序。该数据集和论文重点关注共同开发地球观测信息气候智能作物类型框架,该框架包含建模和训练样本收集。ACES网络应用程序和后续的 ACES 建模软件包使利益相关者能够更轻松地将地球观测用于决策过程。此外,该数据集和论文提供了一种透明且可复制的方法,用于解决和克服由于地形和云层覆盖而造成的遥感限制,这是不丹的一个常见问题。最后,这种方法从一组 3,600 个可能的模型中产生了随机森林“LTE 555”模型,2020 年的总体测试精度为 85%,F-1 得分为 0.88。该模型经过独立验证,得出2020 年独立准确度为 83%,F-1 分数为 0.45。

利用上述 ACES 软件系统中可用的方法,使用 LTE2 555 模型对 2016-2021 年生长季节(5 月至 10 月)进行水稻范围分类。这些图层与地理空间 ACES 工具一起作为 Google Cloud Asset 托管,使最终用户和从业者能够通过网络浏览器查询数据并与之交互。该应用程序允许最终用户可视化整个不丹国家 5 年的稻米作物范围,并按区和分区进行无缝过滤。ACES 按过滤区域总结了预测的年度稻米面积范围,并纳入了不丹农业部和国家统计局报告的稻米统计数据,从而可以在仪表板中进行直接比较。绘制所有年份的预测年度水稻面积增加和/或损失,以评估给定区域的作物轮作动态。此外,ACES 应用程序还有一个专门的气候和物候信息面板,显示土壤湿度、累积降水量、地表以上 2 m 处的气温以及用户选择的地区和年份的 NDVI 中位数,如补充图 S2所示。土壤湿度和降水数据集均来自爱达荷大学 TerraClimate 小组(Abatzoglou 等人,2018)。温度数据集来自欧洲中期天气预报中心 (ECMWF) 欧洲再分析 5 (ERA5) 项目(Muñoz-Sabater 等人,2021)。最后,NDVI 中值是使用 2.3 中概述的相同过程得出的。这些数据集均在 GEE 中提供,并且这些 EO 和模型数据集是共同设计的,因为它们是告知作物状况的相关气候和物候指标。前言 – 人工智能教程
由于 ACES 工具的共同开发性质,它能够通过提供一致、高效的分区级别报告指标来补充决策者的工作。ACES 将关键的农业相关数据量化以及气候智能和简化的 EO 解决方案整合到一个仪表板中,为更具弹性的粮食安全规划流程提供信息。对开发地理空间能力和共同开发平台的关注符合国家数字化的意图和动力,同时该应用程序提供了数据三角测量的选项。最后,ACES 网络应用程序和软件包都是开源且免费提供的,合作伙伴正在努力将 ACES 系统集成到可再生自然资源 (RNR) 统计中,并由政策和规划司 (PPD) 直接使用。
开发 MEL 评估来评估 ACES 应用的影响在未来几年至关重要。具体来说,从利益相关者的角度探索该框架的价值将允许未来的迭代和改进的 ACES 应用程序以及地理空间能力建设工作。
在未来的研究中,我们将研究数据收集团队针对规模化数据收集的协议策略,特别是围绕独立验证工作。由于少数训练点被误解,我们将进一步强调未来训练采样工作的更加严格。此外,我们建议未来的首席执行官数据收集工作专门纳入更多有冰川和/或常年积雪的地点,因为这些被观察到的稀疏类别。训练数据集中景观多样性的增加可以增强模型的性能。此外,对于未来的初步模型测试,我们将探索扰动远远超出最高设置 120 的树木数量。在 ACES 系统的未来实施中,有必要确定测试精度性能峰值。
由于 ACES 应用程序仅专注于水稻分类,并且被合作伙伴视为最高优先级,因此所有开发都集中在这一关键品种上。然而,ACES 软件包非常灵活,能够在地理上重新部署和/或调整以专注于不同的重点作物类型。探索 LTE2 555 模型设置在不同地理位置和新作物类型的敏感性将是该研究小组未来的一个步骤。此外,合作伙伴将计划使用 ACES 应用程序进行地面勘察来评估该工具,作为年度现场调查的一部分。
引文¶
Mayer, Timothy, Biplov Bhandari, Filoteo Gómez Martínez, Kaitlin Walker, Stephanie A. Jiménez, Meryl Kruskopf, Micky Maganini et al. "Employing the
agricultural classification and estimation service (ACES) for mapping smallholder rice farms in Bhutan."
Frontiers in Environmental Science 11 (2023): 1137835.
 地球引擎片段¶
地球引擎片段¶
var Bhutan_ACES_Rice_Maps = ee.ImageCollection("projects/servir-sco-assets/assets/Bhutan/Rice_Extent_Mapper/Predicted_Rice_Post_Processed_IC");
Map.setCenter(90.37, 27.51,8)
var palettes = require('users/gena/packages:palettes');var snazzy = require("users/aazuspan/snazzy:styles");
snazzy.addStyle("https://snazzymaps.com/style/132/light-gray", "Grayscale");Map.addLayer(Bhutan_ACES_Rice_Maps,{min: 0,max: 1, palette: ["fee6ce","fdae6b","e6550d"]},
"ACES Rice Maps 2016-2022 ")应用
aces-bhutan
示例代码:https://code.earthengine.google.com/? scriptPath=users/sat-io/awesome-gee-catalog-examples:agriculture-vegetation-forestry/ACES-BHUTAN
执照¶
该数据集可在 Creative Commons BY-4.0 许可下使用
关键词:农业、土地利用、土地覆盖、不丹、水稻
创建和提供者:Mayer 等人 2023、NASA SERVIR
策展人:Mayer 等人 2023,NASA SERVIR
这篇关于ACES 增强版不丹水稻作物地图(2016-2022 年)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!