本文主要是介绍【Matlab】根据伯德图计算pid参数方法原理,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
在学习鲁棒控制的过程中,有一些步骤需要根据一些性能参数来计算pid参数,因此记录一下根据伯德图的性能来计算pid参数的原理。
系统开环响应的几个关键参数
在使用开环响应初调控制器参数时,主要就是调整几个需要注意的关键参数,相同的,计算控制器参数也是根据关键参数来进行计算的,主要关心的是一下几个参数:
1)相位裕度
2)穿越频率
3)截止频率
相位裕度:相位裕度是系统的开环增益为 0 db 时(穿越频率),对应相频响应曲线与 -180 度的相位差,用于评估系统的稳定性,相位裕度越大,系统稳定性越好
穿越频率:是指系统幅频响应曲线与 0db 的交点频率,用于评估系统的稳定性
截止频率:是指系统幅频响应曲线与 -3db 相交的频率
其中,穿越频率通常用来衡量系统的相位裕度,截止频率通常用来衡量系统的带宽。当系统满足相位裕度要求时,截止频率越高,系统带宽越大,响应速度越快。
根据伯德图来调整pid参数的中心思路:指定想要的穿越频率,以及在此穿越频率下想要系统达到的相位裕度,之后根据实际系统的频率特性曲线,加入控制器补偿其相位裕度与穿越频率。
单校正环节效果与原理分析
进行整体指标的调整需要用到多个环节,接下来的内容是对单个环节的效果与作用进行分解分析,方便后续合并为整体的计算理解。
超前校正与穿越频率,相位裕度
穿越频率中对应的相频响应曲线,决定相位裕度,超前校正可以用于提升系统的相位裕度。
超前校正的思路是:将相位曲线在某一个频率段向上提升,同时尽量不改变幅值曲线,这样就可以增加系统的相位裕度。
例如以下的一个系统的伯德图,随便给了一个控制器,相位裕度是35.9度,想要抬升其相位裕度:

单个超前或滞后控制器的传递函数表达式为:

w_z < w_p 时,就是超前控制器
w_z > w_p 时,就是滞后控制器
但上述表示方式不容易计算各类参数,需要进行转换。转换有两种方法。
方法一(可能会计算出实际中不合理的值,需要查看计算结果)
超前校正调节器转换为以下的形式:

当 α > 1 时,就是超前校正,小于 1 时,就是滞后校正。
写成这种形式,各种参数比较好算:
1)其上下截止频率为 w1 = 1 / (α*Ta) ,w2 = 1 / Ta
2)最大相位处的频率为:

3)最大相位为

使用一个例子来验证一下,假设穿越频率是 1Hz,需要补偿 30度,让超前校正器的最大相位对应频率对应 1Hz,最大相位为 30度,按照上式计算参数:
%超前校正传递函数
f_lead = 1; %假设穿越频率为1Hz
compensation_phase = 30; %假定补偿相位为30度 (α-1)/(α+1) = sin(Φ) α = (1+sin(Φ)) / (1-sin(Φ))
alpha = (1+sin(compensation_phase / 57.3)) / (1-sin(compensation_phase / 57.3)); %系数,必须大于1,否则会变成滞后校正
Ta = 1 / (f_lead*sqrt(alpha));
a_lead = [alpha*Ta 1];
b_lead = [Ta 1];
lead_K = tf(a_lead, b_lead); %超前校正传递函数
margin(lead_K);打印超前校正器的伯德图,与给定一致:

这种方法也是可以的,只是有可能会计算出比较大的 Ta,其实超前校正的分母就对应 PID 控制器中 D 项的滤波器,这种方法会调整滤波器,可能会计算出一个很大的值,在实际中不太合理,需要计算出不合理值后,再重新调整计算。
方法二(与滤波器的值对应,固定其中一个参数)
实际中,对于原始数据的滤波是固定的,因此,可以考虑采用如下的形式:
假设实际中使用的是一个 60Hz 的低通滤波,将T2使用 60Hz 固定住,即 T2 = 1 / fc = 0.0167。
这种方法需要放在整体完整的系统中去求解参数,因此先放在这里。
需要注意,理论上超前校正器最多只能补偿 90 度的相位,实际中,会比理论值更小,如果要增加比较大的相位裕度,可以考虑两个超前校正器串联。
类PI控制器调整截止频率
超前校正器用来补偿系统的相位裕度,截止频率可以由 PI 控制器来进行调节:

但上述的 PI 控制器,在实际的计算过程中,发现了许多的弊端,主要有两处:
1)引入了两个变量,k1,k2,导致没有唯一解,
2)两个变量很容易算出负数来,还需要再检查结果,徒增麻烦
因此,需要将上述控制器砍掉一个参数 k2,只留 k1,最终的计算结果就一直是正数,且计算容易:

这是一个类似 PI 的控制器
接下来,使用此控制器来调节系统,进而求解其开环截止频率的步骤可以简述为以下几步(假设控制对象是二阶系统):
1)将此控制器的传递函数与被控对象传递函数相乘,得到系统的总开环传递函数 KG(s)
2)将 KG(s) 中的 s 用 jw 替代,得到系统的频率响应公式
3)求解 KG(jw) 的幅值为 -3db 时对应的频率 w,即为系统的开环截止频率
系统传递函数为:

加入 PI 控制器的开环传递函数为:

将 s 用 jw 替换,之后写出其幅频响应表达式,之后求解:

此时的幅值对应的 wc 就是截止频率。
求解上述式子需要回顾一些复数计算的公式:
复数的模(幅值)就是其实部,相角是其虚部

再例如,对于以下系统响应:

其幅频响应为:

之后,将 KG 的幅频响应算出:

令其等于 1/sqrt(2) ,也就是列出了截止频率时的方程。
因为是期望截止频率达到想要的值(wc_ref),也就是说,指定 wc = wc_ref,作为一个已知量,写出 k1 的表达式,求得对应的 k1,就可以使此控制器控制截止频率达到想要的值了:

例如,令 w = 15 hz,求解出来的控制器与系统的开环伯德图与截止频率为:

证明计算是无误的,有一点点的误差关系不大,matlab画图与计算的精度有一些区别,不完全一样关系不大。
增加增益系数调节穿越频率
在控制器的前面,再增加一个系数 k,用于调整幅频响应的增益,就可以调整穿越频率到指定的值上,系数 k 的计算原理也比较简单,求出不加 k 时,整个控制器加系统在期望穿越频率下的幅值,记作 g,然后求倒数赋给 k 即可。
完整控制器与系统联立求解参数
以上是单个环节分析验证,最终是要使用完整的控制器与系统进行计算,系数k,加上控制器,再加上超前校正环节,构成最终的控制器,再加上系统的传递函数:

求解参数时,可以根据自己看重系统的哪些性能来联立方程,例如,给定系统的滤波系数T2,期望的系统截止频率 wn_ref,期望的系统穿越频率 wc_ref,期望的系统相位裕度 PM 。
求解时,先刨除参数 k ,因为系数 k 是用于最后的穿越频率增益补偿的,不过k增加了之后,还是会对整体的截止频率预设计有影响。
可以根据截止频率来确定系统的 k1,滤波系数确定系统的 T2,之后的参数 T1 根据以下的期望相位裕度与穿越频率的方程来计算:

注意:arctan 计算出来是弧度,PM 也要转化为弧度制
在计算完成之后,再根据出去 k 的系统的幅频响应,确定系数 k。
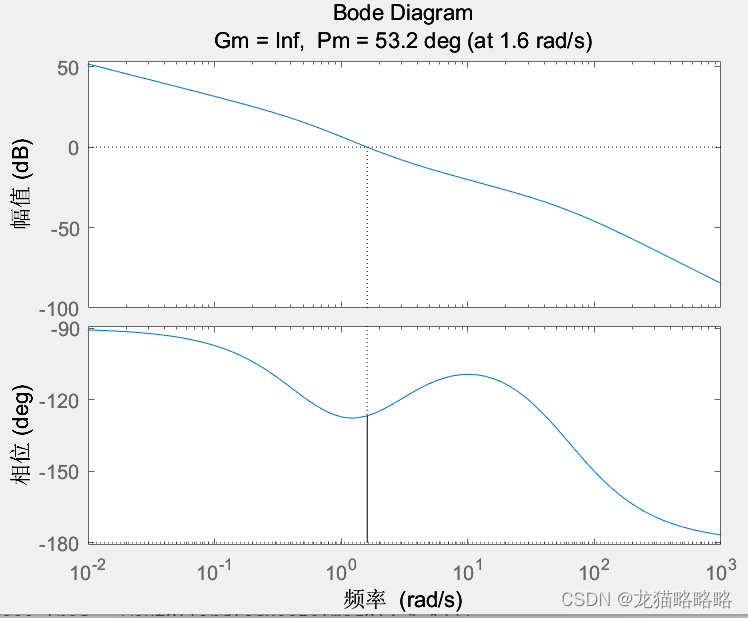
例如,先设置截止频率为 3hz,60Hz 的滤波频率,1.5hz的穿越频率,60度的相位裕度,得出的结果的伯德图为:
控制器转化为PID参数
完整控制器的传递函数为:

PID控制器的传递函数为:

联立两个方程,可以求解出 PID 的参数的表达式:
Kp = k*k1+k*T1 - k*T2
Ki = k
Kd = k*k1*T1 - Kp*T2
Td = T2
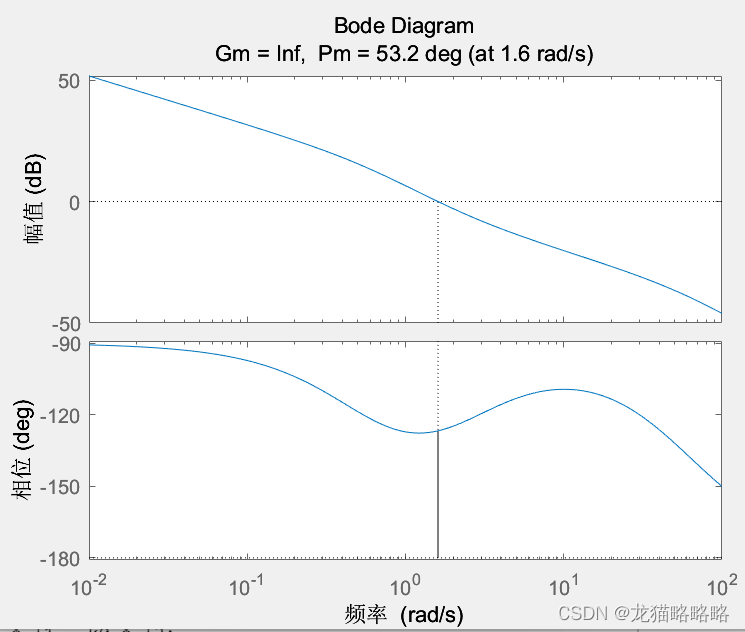
求解出的 PID 控制器的伯德图与上面是一致的:
这篇关于【Matlab】根据伯德图计算pid参数方法原理的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




