本文主要是介绍nuc980开发板使用Agile Modbus软件包-基于 rs485 通讯,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、nuc980开发板电路
打开 nuc980-eth2p 开发板原理图,如下:
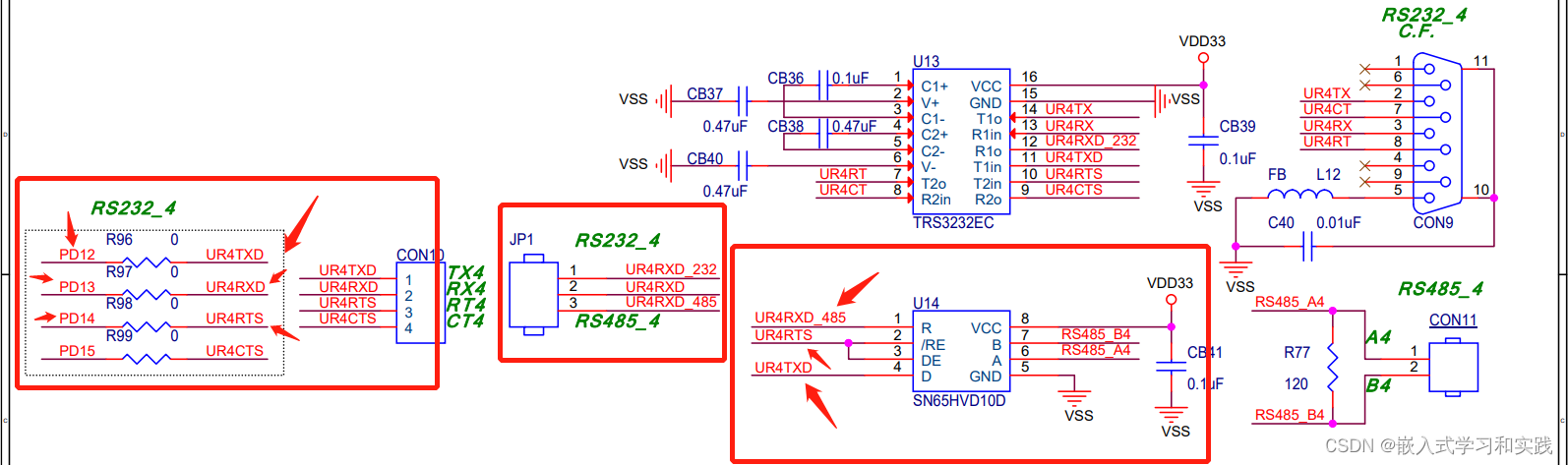
将JP1跳线帽连接到rs485。使用rs485转usb连接到电脑即可。
除了收发引脚,多了一个控制引脚。
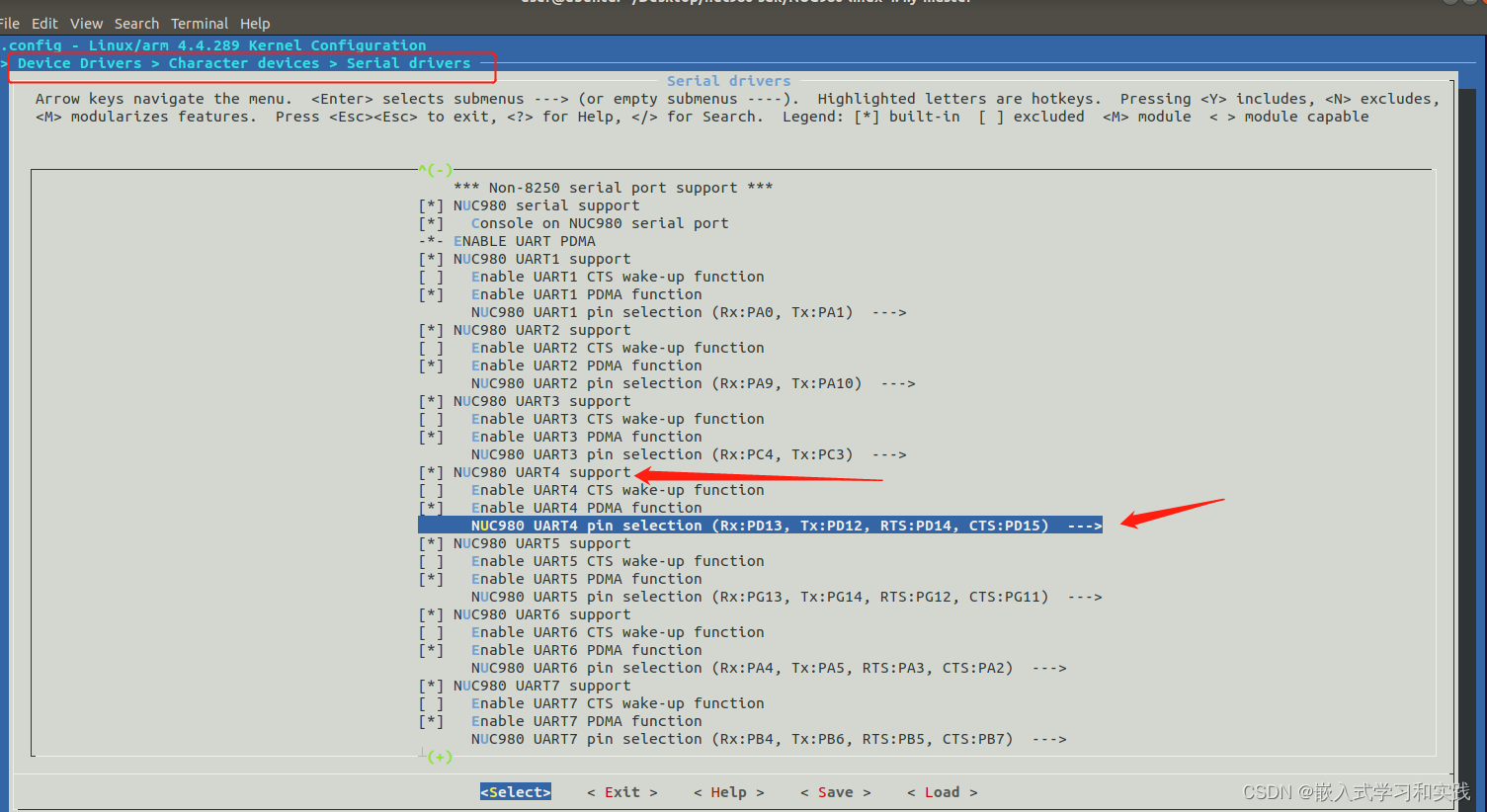
linux内核使能串口4
二、Agile Modbus软件包
1、软件包的获取
下载网址
选择最新版即可。

2、软件包的demo
打开下载的文件,文件工程的结构如下,包含doc、examples、inc、src等文件。
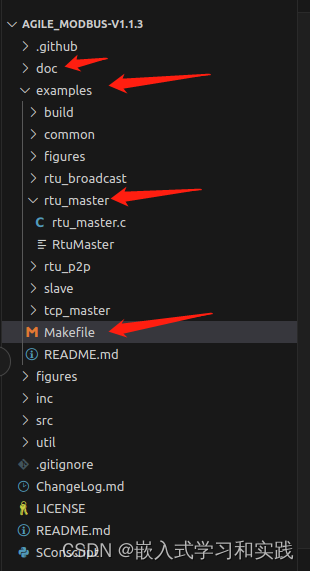
因为我们是 rtu-master,所以打开官方自带的 rtu_master 文件夹。查看串口初始化部分。
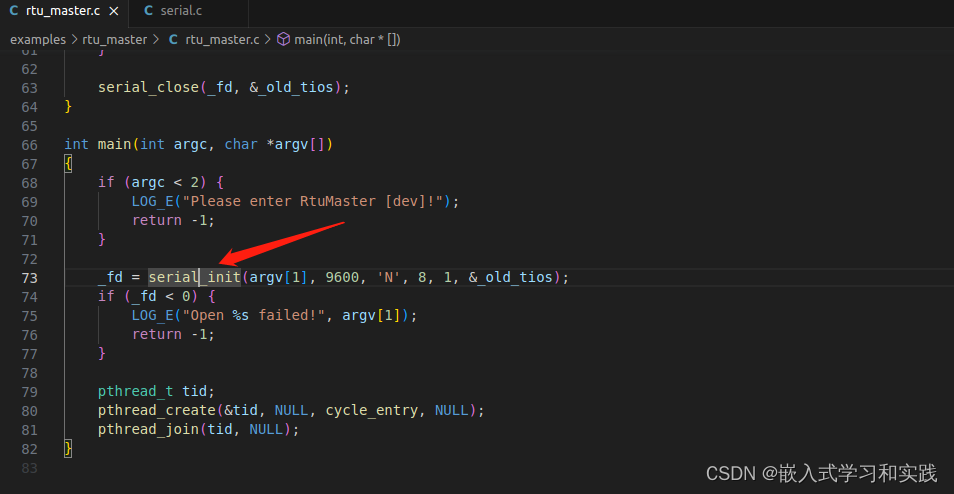
int serial_init(const char *device,int baud, char parity, int data_bit,int stop_bit, struct termios *old_tios)
{struct termios tios;speed_t speed;int flags;/* The O_NOCTTY flag tells UNIX that this program doesn't wantto be the "controlling terminal" for that port. If youdon't specify this then any input (such as keyboard abortsignals and so forth) will affect your processTimeouts are ignored in canonical input mode or when theNDELAY option is set on the file via open or fcntl */flags = O_RDWR | O_NOCTTY | O_NDELAY | O_EXCL;
#ifdef O_CLOEXECflags |= O_CLOEXEC;
#endifint s = open(device, flags);if (s == -1) {LOG_E("ERROR Can't open the device %s (%s)", device, strerror(errno));return -1;}flags = fcntl(s, F_GETFL, 0);flags |= O_NONBLOCK;fcntl(s, F_SETFL, flags);flags = fcntl(s, F_GETFD);flags |= FD_CLOEXEC;fcntl(s, F_SETFD, flags);/* Save */tcgetattr(s, old_tios);memset(&tios, 0, sizeof(struct termios));/* C_ISPEED Input baud (new interface)C_OSPEED Output baud (new interface)*/switch (baud) {case 110:speed = B110;break;case 300:speed = B300;break;case 600:speed = B600;break;case 1200:speed = B1200;break;case 2400:speed = B2400;break;case 4800:speed = B4800;break;case 9600:speed = B9600;break;case 19200:speed = B19200;break;case 38400:speed = B38400;break;
#ifdef B57600case 57600:speed = B57600;break;
#endif
#ifdef B115200case 115200:speed = B115200;break;
#endif
#ifdef B230400case 230400:speed = B230400;break;
#endif
#ifdef B460800case 460800:speed = B460800;break;
#endif
#ifdef B500000case 500000:speed = B500000;break;
#endif
#ifdef B576000case 576000:speed = B576000;break;
#endif
#ifdef B921600case 921600:speed = B921600;break;
#endif
#ifdef B1000000case 1000000:speed = B1000000;break;
#endif
#ifdef B1152000case 1152000:speed = B1152000;break;
#endif
#ifdef B1500000case 1500000:speed = B1500000;break;
#endif
#ifdef B2500000case 2500000:speed = B2500000;break;
#endif
#ifdef B3000000case 3000000:speed = B3000000;break;
#endif
#ifdef B3500000case 3500000:speed = B3500000;break;
#endif
#ifdef B4000000case 4000000:speed = B4000000;break;
#endifdefault:speed = B9600;LOG_W("WARNING Unknown baud rate %d for %s (B9600 used)", baud, device);}/* Set the baud rate */if ((cfsetispeed(&tios, speed) < 0) ||(cfsetospeed(&tios, speed) < 0)) {close(s);s = -1;return -1;}/* C_CFLAG Control optionsCLOCAL Local line - do not change "owner" of portCREAD Enable receiver*/tios.c_cflag |= (CREAD | CLOCAL);/* CSIZE, HUPCL, CRTSCTS (hardware flow control) *//* Set data bits (5, 6, 7, 8 bits)CSIZE Bit mask for data bits*/tios.c_cflag &= ~CSIZE;switch (data_bit) {case 5:tios.c_cflag |= CS5;break;case 6:tios.c_cflag |= CS6;break;case 7:tios.c_cflag |= CS7;break;case 8:default:tios.c_cflag |= CS8;break;}/* Stop bit (1 or 2) */if (stop_bit == 1)tios.c_cflag &= ~CSTOPB;else /* 2 */tios.c_cflag |= CSTOPB;/* PARENB Enable parity bitPARODD Use odd parity instead of even */if (parity == 'N') {/* None */tios.c_cflag &= ~PARENB;} else if (parity == 'E') {/* Even */tios.c_cflag |= PARENB;tios.c_cflag &= ~PARODD;} else {/* Odd */tios.c_cflag |= PARENB;tios.c_cflag |= PARODD;}/* Read the man page of termios if you need more information. *//* This field isn't used on POSIX systemstios.c_line = 0;*//* C_LFLAG Line optionsISIG Enable SIGINTR, SIGSUSP, SIGDSUSP, and SIGQUIT signalsICANON Enable canonical input (else raw)XCASE Map uppercase \lowercase (obsolete)ECHO Enable echoing of input charactersECHOE Echo erase character as BS-SP-BSECHOK Echo NL after kill characterECHONL Echo NLNOFLSH Disable flushing of input buffers afterinterrupt or quit charactersIEXTEN Enable extended functionsECHOCTL Echo control characters as ^char and delete as ~?ECHOPRT Echo erased character as character erasedECHOKE BS-SP-BS entire line on line killFLUSHO Output being flushedPENDIN Retype pending input at next read or input charTOSTOP Send SIGTTOU for background outputCanonical input is line-oriented. Input characters are putinto a buffer which can be edited interactively by the useruntil a CR (carriage return) or LF (line feed) character isreceived.Raw input is unprocessed. Input characters are passedthrough exactly as they are received, when they arereceived. Generally you'll deselect the ICANON, ECHO,ECHOE, and ISIG options when using raw input*//* Raw input */tios.c_lflag &= ~(ICANON | ECHO | ECHOE | ISIG);/* C_IFLAG Input optionsConstant DescriptionINPCK Enable parity checkIGNPAR Ignore parity errorsPARMRK Mark parity errorsISTRIP Strip parity bitsIXON Enable software flow control (outgoing)IXOFF Enable software flow control (incoming)IXANY Allow any character to start flow againIGNBRK Ignore break conditionBRKINT Send a SIGINT when a break condition is detectedINLCR Map NL to CRIGNCR Ignore CRICRNL Map CR to NLIUCLC Map uppercase to lowercaseIMAXBEL Echo BEL on input line too long*/if (parity == 'N') {/* None */tios.c_iflag &= ~INPCK;} else {tios.c_iflag |= INPCK;}/* Software flow control is disabled */tios.c_iflag &= ~(IXON | IXOFF | IXANY);/* C_OFLAG Output optionsOPOST Postprocess output (not set = raw output)ONLCR Map NL to CR-NLONCLR ant others needs OPOST to be enabled*//* Raw ouput */tios.c_oflag &= ~OPOST;/* C_CC Control charactersVMIN Minimum number of characters to readVTIME Time to wait for data (tenths of seconds)UNIX serial interface drivers provide the ability tospecify character and packet timeouts. Two elements of thec_cc array are used for timeouts: VMIN and VTIME. Timeoutsare ignored in canonical input mode or when the NDELAYoption is set on the file via open or fcntl.VMIN specifies the minimum number of characters to read. Ifit is set to 0, then the VTIME value specifies the time towait for every character read. Note that this does not meanthat a read call for N bytes will wait for N characters tocome in. Rather, the timeout will apply to the firstcharacter and the read call will return the number ofcharacters immediately available (up to the number yourequest).If VMIN is non-zero, VTIME specifies the time to wait forthe first character read. If a character is read within thetime given, any read will block (wait) until all VMINcharacters are read. That is, once the first character isread, the serial interface driver expects to receive anentire packet of characters (VMIN bytes total). If nocharacter is read within the time allowed, then the call toread returns 0. This method allows you to tell the serialdriver you need exactly N bytes and any read call willreturn 0 or N bytes. However, the timeout only applies tothe first character read, so if for some reason the drivermisses one character inside the N byte packet then the readcall could block forever waiting for additional inputcharacters.VTIME specifies the amount of time to wait for incomingcharacters in tenths of seconds. If VTIME is set to 0 (thedefault), reads will block (wait) indefinitely unless theNDELAY option is set on the port with open or fcntl.*//* Unused because we use open with the NDELAY option */tios.c_cc[VMIN] = 0;tios.c_cc[VTIME] = 0;if (tcsetattr(s, TCSANOW, &tios) < 0) {close(s);s = -1;return -1;}return s;
}
修改Makefile文件
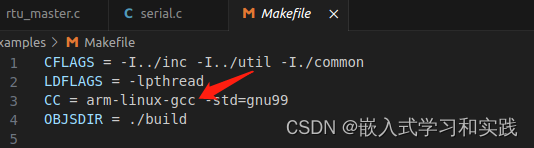
将 gcc 改为 arm-linux-gcc
CC = arm-linux-gcc -std=gnu99
此时编译并下载到开发板,肯定不能正常通信,还需要对 serial.c 文件进行适当的修改。
三、修改思路
思路:通过对控制引脚的控制,来控制数据的接收和发送。
方法1
不修改串口的初始化,通过配置控制引脚的输出高低电平来操作数据的收发。
方法2
修改串口的初始化,配置为rs485模式,配置 RTS的引脚即可。
文章主要介绍方法2。
rs485收发测试可参考linux 串口测试指令和测试程序
四、串口配置修改
添加头文件
#include <sys/types.h>
#include <sys/stat.h>
#include <pthread.h>
#include <linux/serial.h>
初始化添加代码
int portfd;#if (__GNUC__ == 4 && __GNUC_MINOR__ == 3)struct my_serial_rs485 rs485conf;struct my_serial_rs485 rs485conf_bak;
#elsestruct serial_rs485 rs485conf;
#endif portfd=s;if (ioctl (portfd, TIOCGRS485, &rs485conf) < 0) {/* Error handling.*/ printf("ioctl TIOCGRS485 error.\n");}/* Enable RS485 mode: */rs485conf.flags |= SER_RS485_ENABLED;/* Set logical level for RTS pin equal to 1 when sending: */rs485conf.flags |= SER_RS485_RTS_ON_SEND;/* set logical level for RTS pin equal to 0 after sending: */ rs485conf.flags &= ~(SER_RS485_RTS_AFTER_SEND);/* Set rts delay after send, if needed: */rs485conf.delay_rts_after_send = 0x80;if (ioctl (portfd, TIOCSRS485, &rs485conf) < 0){/* Error handling.*/ printf("ioctl TIOCSRS485 error.\n");}else{printf("rs485conf.flags 0x%x.\n", rs485conf.flags);printf("rs485conf.delay_rts_before_send 0x%x.\n", rs485conf.delay_rts_before_send);printf("rs485conf.delay_rts_after_send 0x%x.\n", rs485conf.delay_rts_after_send);}
serial.c 整体代码
#include "serial.h"
#include <errno.h>
#include <fcntl.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/ioctl.h>
#include <sys/time.h>
#include <termios.h>
#include <unistd.h>#include <sys/types.h>
#include <sys/stat.h>
#include <pthread.h>
#include <linux/serial.h>#define DBG_ENABLE
#define DBG_COLOR
#define DBG_SECTION_NAME "serial"
#define DBG_LEVEL DBG_LOG
#include "dbg_log.h"int serial_init(const char *device,int baud, char parity, int data_bit,int stop_bit, struct termios *old_tios)
{struct termios tios;speed_t speed;int flags;/* The O_NOCTTY flag tells UNIX that this program doesn't wantto be the "controlling terminal" for that port. If youdon't specify this then any input (such as keyboard abortsignals and so forth) will affect your processTimeouts are ignored in canonical input mode or when theNDELAY option is set on the file via open or fcntl */flags = O_RDWR | O_NOCTTY | O_NDELAY | O_EXCL;
#ifdef O_CLOEXECflags |= O_CLOEXEC;
#endifint s = open(device, flags);if (s == -1) {LOG_E("ERROR Can't open the device %s (%s)", device, strerror(errno));return -1;}flags = fcntl(s, F_GETFL, 0);flags |= O_NONBLOCK;fcntl(s, F_SETFL, flags);flags = fcntl(s, F_GETFD);flags |= FD_CLOEXEC;fcntl(s, F_SETFD, flags);/* Save */tcgetattr(s, old_tios);memset(&tios, 0, sizeof(struct termios));/* C_ISPEED Input baud (new interface)C_OSPEED Output baud (new interface)*/switch (baud) {case 110:speed = B110;break;case 300:speed = B300;break;case 600:speed = B600;break;case 1200:speed = B1200;break;case 2400:speed = B2400;break;case 4800:speed = B4800;break;case 9600:speed = B9600;break;case 19200:speed = B19200;break;case 38400:speed = B38400;break;
#ifdef B57600case 57600:speed = B57600;break;
#endif
#ifdef B115200case 115200:speed = B115200;break;
#endif
#ifdef B230400case 230400:speed = B230400;break;
#endif
#ifdef B460800case 460800:speed = B460800;break;
#endif
#ifdef B500000case 500000:speed = B500000;break;
#endif
#ifdef B576000case 576000:speed = B576000;break;
#endif
#ifdef B921600case 921600:speed = B921600;break;
#endif
#ifdef B1000000case 1000000:speed = B1000000;break;
#endif
#ifdef B1152000case 1152000:speed = B1152000;break;
#endif
#ifdef B1500000case 1500000:speed = B1500000;break;
#endif
#ifdef B2500000case 2500000:speed = B2500000;break;
#endif
#ifdef B3000000case 3000000:speed = B3000000;break;
#endif
#ifdef B3500000case 3500000:speed = B3500000;break;
#endif
#ifdef B4000000case 4000000:speed = B4000000;break;
#endifdefault:speed = B9600;LOG_W("WARNING Unknown baud rate %d for %s (B9600 used)", baud, device);}/* Set the baud rate */if ((cfsetispeed(&tios, speed) < 0) ||(cfsetospeed(&tios, speed) < 0)) {close(s);s = -1;return -1;}/* C_CFLAG Control optionsCLOCAL Local line - do not change "owner" of portCREAD Enable receiver*/tios.c_cflag |= (CREAD | CLOCAL);/* CSIZE, HUPCL, CRTSCTS (hardware flow control) *//* Set data bits (5, 6, 7, 8 bits)CSIZE Bit mask for data bits*/tios.c_cflag &= ~CSIZE;switch (data_bit) {case 5:tios.c_cflag |= CS5;break;case 6:tios.c_cflag |= CS6;break;case 7:tios.c_cflag |= CS7;break;case 8:default:tios.c_cflag |= CS8;break;}/* Stop bit (1 or 2) */if (stop_bit == 1)tios.c_cflag &= ~CSTOPB;else /* 2 */tios.c_cflag |= CSTOPB;/* PARENB Enable parity bitPARODD Use odd parity instead of even */if (parity == 'N') {/* None */tios.c_cflag &= ~PARENB;} else if (parity == 'E') {/* Even */tios.c_cflag |= PARENB;tios.c_cflag &= ~PARODD;} else {/* Odd */tios.c_cflag |= PARENB;tios.c_cflag |= PARODD;}/* Read the man page of termios if you need more information. *//* This field isn't used on POSIX systemstios.c_line = 0;*//* C_LFLAG Line optionsISIG Enable SIGINTR, SIGSUSP, SIGDSUSP, and SIGQUIT signalsICANON Enable canonical input (else raw)XCASE Map uppercase \lowercase (obsolete)ECHO Enable echoing of input charactersECHOE Echo erase character as BS-SP-BSECHOK Echo NL after kill characterECHONL Echo NLNOFLSH Disable flushing of input buffers afterinterrupt or quit charactersIEXTEN Enable extended functionsECHOCTL Echo control characters as ^char and delete as ~?ECHOPRT Echo erased character as character erasedECHOKE BS-SP-BS entire line on line killFLUSHO Output being flushedPENDIN Retype pending input at next read or input charTOSTOP Send SIGTTOU for background outputCanonical input is line-oriented. Input characters are putinto a buffer which can be edited interactively by the useruntil a CR (carriage return) or LF (line feed) character isreceived.Raw input is unprocessed. Input characters are passedthrough exactly as they are received, when they arereceived. Generally you'll deselect the ICANON, ECHO,ECHOE, and ISIG options when using raw input*//* Raw input */tios.c_lflag &= ~(ICANON | ECHO | ECHOE | ISIG);/* C_IFLAG Input optionsConstant DescriptionINPCK Enable parity checkIGNPAR Ignore parity errorsPARMRK Mark parity errorsISTRIP Strip parity bitsIXON Enable software flow control (outgoing)IXOFF Enable software flow control (incoming)IXANY Allow any character to start flow againIGNBRK Ignore break conditionBRKINT Send a SIGINT when a break condition is detectedINLCR Map NL to CRIGNCR Ignore CRICRNL Map CR to NLIUCLC Map uppercase to lowercaseIMAXBEL Echo BEL on input line too long*/if (parity == 'N') {/* None */tios.c_iflag &= ~INPCK;} else {tios.c_iflag |= INPCK;}/* Software flow control is disabled */tios.c_iflag &= ~(IXON | IXOFF | IXANY);/* C_OFLAG Output optionsOPOST Postprocess output (not set = raw output)ONLCR Map NL to CR-NLONCLR ant others needs OPOST to be enabled*//* Raw ouput */tios.c_oflag &= ~OPOST;/* C_CC Control charactersVMIN Minimum number of characters to readVTIME Time to wait for data (tenths of seconds)UNIX serial interface drivers provide the ability tospecify character and packet timeouts. Two elements of thec_cc array are used for timeouts: VMIN and VTIME. Timeoutsare ignored in canonical input mode or when the NDELAYoption is set on the file via open or fcntl.VMIN specifies the minimum number of characters to read. Ifit is set to 0, then the VTIME value specifies the time towait for every character read. Note that this does not meanthat a read call for N bytes will wait for N characters tocome in. Rather, the timeout will apply to the firstcharacter and the read call will return the number ofcharacters immediately available (up to the number yourequest).If VMIN is non-zero, VTIME specifies the time to wait forthe first character read. If a character is read within thetime given, any read will block (wait) until all VMINcharacters are read. That is, once the first character isread, the serial interface driver expects to receive anentire packet of characters (VMIN bytes total). If nocharacter is read within the time allowed, then the call toread returns 0. This method allows you to tell the serialdriver you need exactly N bytes and any read call willreturn 0 or N bytes. However, the timeout only applies tothe first character read, so if for some reason the drivermisses one character inside the N byte packet then the readcall could block forever waiting for additional inputcharacters.VTIME specifies the amount of time to wait for incomingcharacters in tenths of seconds. If VTIME is set to 0 (thedefault), reads will block (wait) indefinitely unless theNDELAY option is set on the port with open or fcntl.*//* Unused because we use open with the NDELAY option */tios.c_cc[VMIN] = 0;tios.c_cc[VTIME] = 0;if (tcsetattr(s, TCSANOW, &tios) < 0) {close(s);s = -1;return -1;}/***************************/int portfd;#if (__GNUC__ == 4 && __GNUC_MINOR__ == 3)struct my_serial_rs485 rs485conf;struct my_serial_rs485 rs485conf_bak;
#elsestruct serial_rs485 rs485conf;//struct serial_rs485 rs485conf_bak;
#endif //struct termios newtios,oldtios; /*termianal settings */portfd=s;
/*get serial port parnms,save away */// tcgetattr(portfd,&newtios);// memcpy(&oldtios,&newtios,sizeof newtios);// /* configure new values */// cfmakeraw(&newtios); /*see man page */// newtios.c_iflag |=IGNPAR; /*ignore parity on input */// newtios.c_oflag &= ~(OPOST | ONLCR | OLCUC | OCRNL | ONOCR | ONLRET | OFILL); // newtios.c_cflag = CS8 | CLOCAL | CREAD;// newtios.c_cc[VMIN]=1; /* block until 1 char received */// newtios.c_cc[VTIME]=0; /*no inter-character timer *//* 115200 bps */// cfsetospeed(&newtios,B9600);// cfsetispeed(&newtios,B9600);// /* register cleanup stuff */// atexit(reset_tty_atexit);// memset(&sa,0,sizeof sa);// sa.sa_handler = reset_tty_handler;// sigaction(SIGHUP,&sa,NULL);// sigaction(SIGINT,&sa,NULL);// sigaction(SIGPIPE,&sa,NULL);// sigaction(SIGTERM,&sa,NULL);// /*apply modified termios */// saved_portfd=portfd;// tcflush(portfd,TCIFLUSH);// tcsetattr(portfd,TCSADRAIN,&newtios);if (ioctl (portfd, TIOCGRS485, &rs485conf) < 0) {/* Error handling.*/ printf("ioctl TIOCGRS485 error.\n");}/* Enable RS485 mode: */rs485conf.flags |= SER_RS485_ENABLED;/* Set logical level for RTS pin equal to 1 when sending: */rs485conf.flags |= SER_RS485_RTS_ON_SEND;//rs485conf.flags |= SER_RS485_RTS_AFTER_SEND;/* set logical level for RTS pin equal to 0 after sending: */ rs485conf.flags &= ~(SER_RS485_RTS_AFTER_SEND);//rs485conf.flags &= ~(SER_RS485_RTS_ON_SEND);/* Set rts delay after send, if needed: */rs485conf.delay_rts_after_send = 0x80;if (ioctl (portfd, TIOCSRS485, &rs485conf) < 0){/* Error handling.*/ printf("ioctl TIOCSRS485 error.\n");}else{printf("rs485conf.flags 0x%x.\n", rs485conf.flags);printf("rs485conf.delay_rts_before_send 0x%x.\n", rs485conf.delay_rts_before_send);printf("rs485conf.delay_rts_after_send 0x%x.\n", rs485conf.delay_rts_after_send);}/****************************/return s;
}void serial_close(int s, struct termios *old_tios)
{if (s != -1) {tcsetattr(s, TCSANOW, old_tios);close(s);}
}int serial_send(int s, const uint8_t *buf, int length)
{return write(s, buf, length);
}int serial_receive(int s, uint8_t *buf, int bufsz, int timeout)
{int len = 0;int rc = 0;fd_set rset;struct timeval tv;while (bufsz > 0) {FD_ZERO(&rset);FD_SET(s, &rset);tv.tv_sec = timeout / 1000;tv.tv_usec = (timeout % 1000) * 1000;rc = select(s + 1, &rset, NULL, NULL, &tv);if (rc == -1) {if (errno == EINTR)continue;}if (rc <= 0) {break;}rc = read(s, buf + len, bufsz);if (rc <= 0) {break;}len += rc;bufsz -= rc;timeout = 20;}if (rc >= 0) {rc = len;}return rc;
}int serial_flush(int s)
{if (s != -1) {tcflush(s, TCIOFLUSH);}return 0;
}五、编译验证
将修改后的代码进行交叉编译,并下载到开发板。
打开测试软件,启动程序。
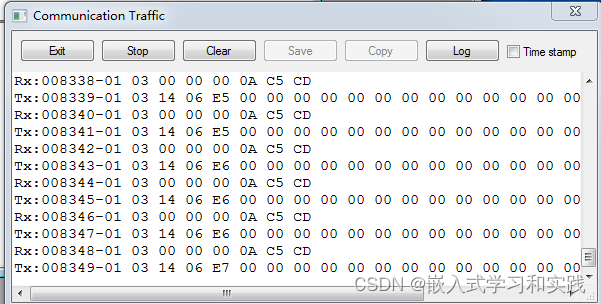
软件通信日志部分:
开发板串口打印信息:
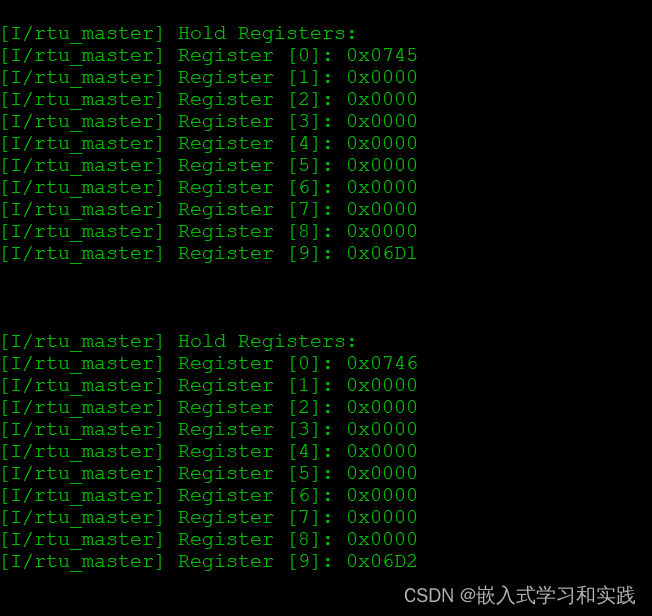
程序能能够通过rs485正常获取到modbus数据。
这篇关于nuc980开发板使用Agile Modbus软件包-基于 rs485 通讯的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




