本文主要是介绍HPM6750系列--第十一篇 Uart讲解(轮询模式),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、目的
在介绍完GPIO的相关内容下一个必须介绍的就是uart了,因为串口一个主要用途就是用于调试信息打印。
HPM6750在uart的配置上也是相当炸裂,有17个串口;结合HPM6750的高主频高内存,完全可以作为一个串口服务器。
二、介绍
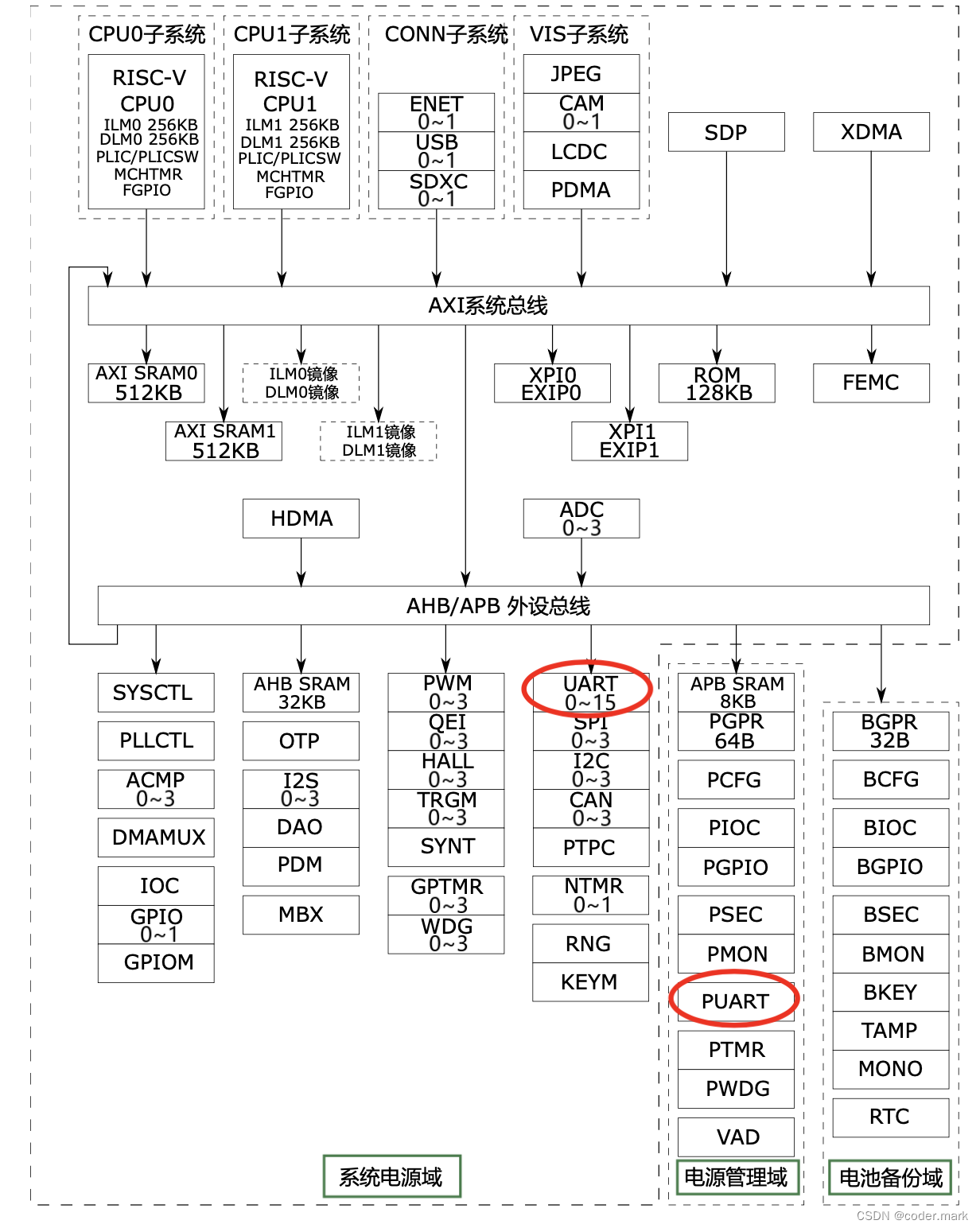
1.框图

TX FIFO 包含待发送的数据,并将数据传送到 TX 移位寄存器。TX 移位寄存器为并行-串行转换器,把发送数据转换成串行的比特流。
TXFIFO 的写入口是THR寄存器 (Transmitter Holding Register)。用户需要把FCR寄存器 (FIFO Control Reg- ister) 的 FIFOE 位置 1,来打开 TXFIFO。
RX 控制器使用波特率控制模块生成的过采样时钟,对输入的每一位进行采样,并把收到的每一位移入 RX 移 位寄存器。RX 移位寄存器对数据进行串行-并行转换,并把数据存入 RX FIFO。RX FIFO 的读入口是RBR寄存器 (Receiver Buffer Register),用户需要把FCR寄存器 (FIFO Control Register)的 FIFOE 位置 1,来打开 RXFIFO。
2.基本特征
- 支持 5∼8 位数据长度
- 可配置停止位:1 位,1.5 位或者 2 位
- 可配置奇偶校验位:奇校验,偶校验,粘校验位
- 支持 DMA 数据传输
- 支持可配置波特率,支持独立的波特率生成时钟
- 支持硬件流控
- 支持奇偶校验错误,数据 FIFO 溢出等错误检测
- 16 字节的 TXFIFO 和 RXFIFO
- 支持各类中断
3.功能时钟(输入时钟)、过采样率、波特率三者之间的关系
在时钟章节我们讲到每个外设都可以八选一选择一个功能时钟,并且设置分频。


上图中我们通过clock_set_source_divider设置uart0选择clk_src_osc24m=24MHz时钟源,不分频,也就是说上图中的配置uart0输入时钟为24MHz。
UART 时钟与波特率的比率就是过采样率OSC。
RX 控制器利用过采样时钟对输入数据进行采样。假设过采样率OSC为 16 当检测到输入信号第一个下降沿 时 (起始 START 位),计数器从 1 开始计数直到 16,在计数到 8 时,RX 控制器对输入数据采样。计数器在计数 到 16 后,会复位到 1,以此采样下一位数据,循环往复,直到停止 STOP 位。TX 控制器同样利用过采样时钟来 生成输出数据流。
uart外设内部还有一个时钟分频寄存器(16位)Divisor。分频值的 MSB 位于DLM寄存器 (Divisor Latch MSB),而 LSB 位于DLL寄存器 (Divisor Latch LSB)。
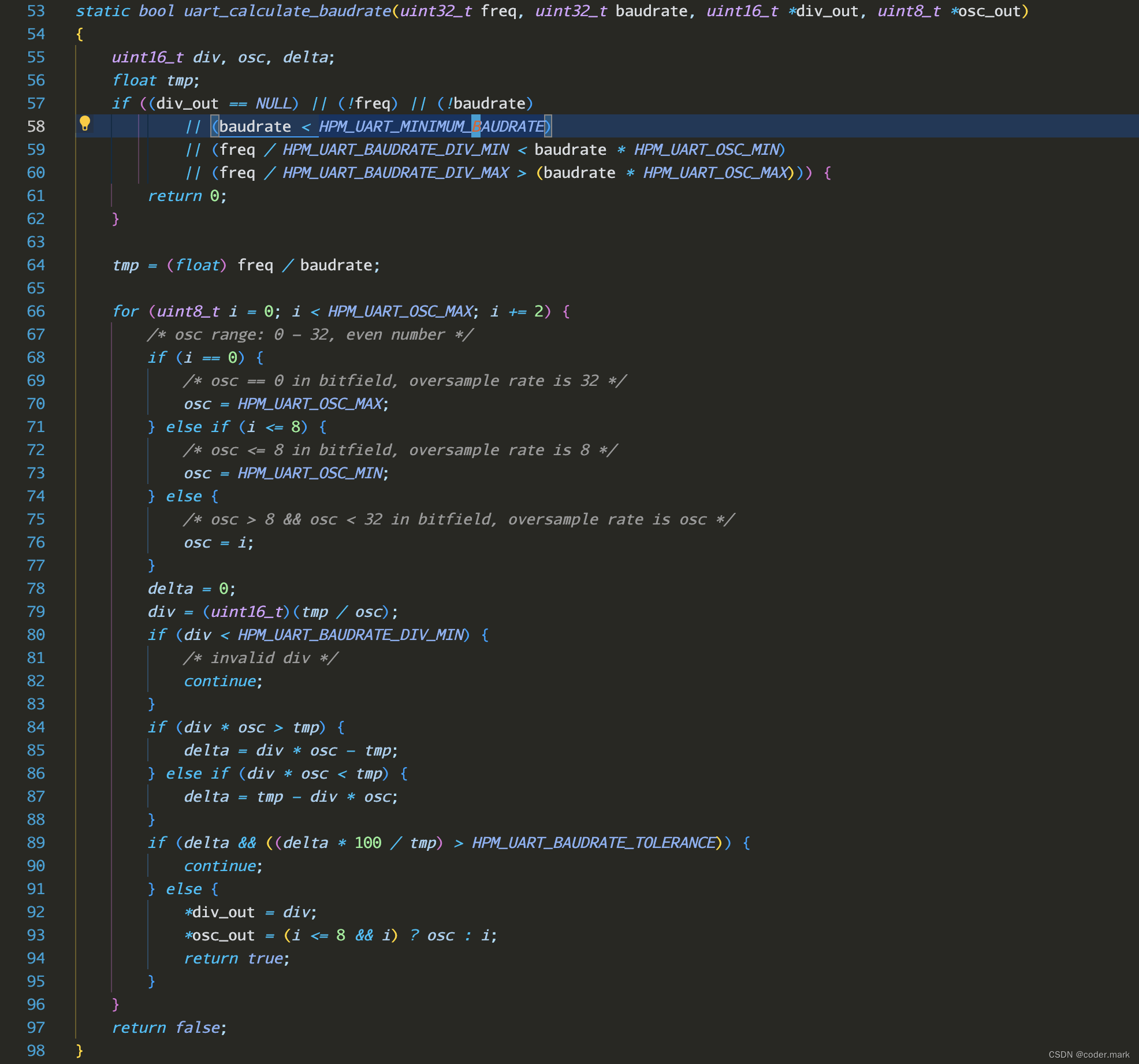
三者之间的关系如下:


在SDK中有一个函数专门用于计算分频系数和过采样率,对于开发者来讲,只需要设置输入时钟和波特率即可。
4.引脚配置(以uart0为例)

由于uart0使用PY06/07作为TXD/RXD, 而PY06/07属于电源管理域的引脚,所以必须先通过HPM_PIOC先将引脚映射到HPM_IOC中,然后由HPM_IOC再将PY06/07复用为外设引脚。
5.API接口说明
typedef struct hpm_uart_config {uint32_t src_freq_in_hz; /**< Source clock frequency in Hz */uint32_t baudrate; /**< Baudrate */uint8_t num_of_stop_bits; /**< Number of stop bits */uint8_t word_length; /**< Word length */uint8_t parity; /**< Parity */uint8_t tx_fifo_level; /**< TX Fifo level */uint8_t rx_fifo_level; /**< RX Fifo level */bool dma_enable; /**< DMA Enable flag */bool fifo_enable; /**< Fifo Enable flag */uart_modem_config_t modem_config; /**< Modem config */
#if defined(UART_SOC_HAS_RXLINE_IDLE_DETECTION) && (UART_SOC_HAS_RXLINE_IDLE_DETECTION == 1)uart_rxline_idle_config_t rxidle_config; /**< RX Idle configuration */
#endif
#if defined(UART_SOC_HAS_TXLINE_IDLE_DETECTION) && (UART_SOC_HAS_TXLINE_IDLE_DETECTION == 1)uart_rxline_idle_config_t txidle_config; /**< TX Idle configuration */
#endif
#if defined(UART_SOC_HAS_RXEN_CFG) && (UART_SOC_HAS_RXEN_CFG == 1)bool rx_enable; /**< RX Enable configuration */
#endif
} uart_config_t;各个字段含义:
| src_freq_in_hz | 输入时钟,八选一,并且可以分频(注意uart内部可以再次分频) |
| baudrate | 波特率 |
| num_of_stop_bits | 停止位 typedef enum num_of_stop_bits { |
| word_length | 字长 typedef enum word_length { |
| parity | 奇偶校验位 typedef enum parity { |
| tx_fifo_level | 发送触发阈值 |
| rx_fifo_level | 接收触发阈值 |
| dma_enable | 使能DMA |
| fifo_enable | 使能FIFO |
| modem_config | 流控 typedef struct uart_modem_config { |
uart_init函数用于设置波特率、字长、停止位、奇偶校验以及FIFO阈值。
hpm_stat_t uart_init(UART_Type *ptr, uart_config_t *config)
{uint32_t tmp;uint8_t osc;uint16_t div;/* disable all interrupts */ptr->IER = 0;/* Set DLAB to 1 */ptr->LCR |= UART_LCR_DLAB_MASK;if (!uart_calculate_baudrate(config->src_freq_in_hz, config->baudrate, &div, &osc)) {return status_uart_no_suitable_baudrate_parameter_found;}ptr->OSCR = (ptr->OSCR & ~UART_OSCR_OSC_MASK)| UART_OSCR_OSC_SET(osc);ptr->DLL = UART_DLL_DLL_SET(div >> 0);ptr->DLM = UART_DLM_DLM_SET(div >> 8);//设置奇偶校验/* DLAB bit needs to be cleared once baudrate is configured */tmp = ptr->LCR & (~UART_LCR_DLAB_MASK);tmp &= ~(UART_LCR_SPS_MASK | UART_LCR_EPS_MASK | UART_LCR_PEN_MASK);switch (config->parity) {case parity_none:break;case parity_odd:tmp |= UART_LCR_PEN_MASK;break;case parity_even:tmp |= UART_LCR_PEN_MASK | UART_LCR_EPS_MASK;break;case parity_always_1:tmp |= UART_LCR_PEN_MASK | UART_LCR_SPS_MASK;break;case parity_always_0:tmp |= UART_LCR_EPS_MASK | UART_LCR_PEN_MASK| UART_LCR_SPS_MASK;break;default:/* invalid configuration */return status_invalid_argument;}//设置停止位tmp &= ~(UART_LCR_STB_MASK | UART_LCR_WLS_MASK);switch (config->num_of_stop_bits) {case stop_bits_1:break;case stop_bits_1_5:tmp |= UART_LCR_STB_MASK;break;case stop_bits_2:if (config->word_length < word_length_6_bits) {/* invalid configuration */return status_invalid_argument;}tmp |= UART_LCR_STB_MASK;break;default:/* invalid configuration */return status_invalid_argument;}//设置字长ptr->LCR = tmp | UART_LCR_WLS_SET(config->word_length);//复位FIFO并设置FIFO阈值#if defined(UART_SOC_HAS_FINE_FIFO_THR) && (UART_SOC_HAS_FINE_FIFO_THR == 1)/* reset TX and RX fifo */ptr->FCRR = UART_FCRR_TFIFORST_MASK | UART_FCRR_RFIFORST_MASK;/* Enable FIFO */ptr->FCRR = UART_FCRR_FIFOT4EN_MASK| UART_FCRR_FIFOE_SET(config->fifo_enable)| UART_FCRR_TFIFOT4_SET(config->tx_fifo_level)| UART_FCRR_RFIFOT4_SET(config->rx_fifo_level)| UART_FCRR_DMAE_SET(config->dma_enable);#else/* reset TX and RX fifo */ptr->FCR = UART_FCR_TFIFORST_MASK | UART_FCR_RFIFORST_MASK;/* Enable FIFO */tmp = UART_FCR_FIFOE_SET(config->fifo_enable)| UART_FCR_TFIFOT_SET(config->tx_fifo_level)| UART_FCR_RFIFOT_SET(config->rx_fifo_level)| UART_FCR_DMAE_SET(config->dma_enable);ptr->FCR = tmp;/* store FCR register value */ptr->GPR = tmp;
#endifuart_modem_config(ptr, &config->modem_config);#if defined(UART_SOC_HAS_RXLINE_IDLE_DETECTION) && (UART_SOC_HAS_RXLINE_IDLE_DETECTION == 1)uart_init_rxline_idle_detection(ptr, config->rxidle_config);
#endif
#if defined(UART_SOC_HAS_RXEN_CFG) && (UART_SOC_HAS_RXEN_CFG == 1)if (config->rx_enable) {ptr->IDLE_CFG |= UART_IDLE_CFG_RXEN_MASK;}
#endifreturn status_success;
}读取字节
hpm_stat_t uart_receive_byte(UART_Type *ptr, uint8_t *byte)
{uint32_t retry = 0;while (!(ptr->LSR & UART_LSR_DR_MASK)) {if (retry > HPM_UART_DRV_RETRY_COUNT) {break;}retry++;}if (retry > HPM_UART_DRV_RETRY_COUNT) {return status_timeout;}*byte = ptr->RBR & UART_RBR_RBR_MASK;return status_success;
}
不断查询LSR寄存器的UART_LSR_DR_MASK是否置位(存在有效的接收数据时该位置 1),如果置位说明可读,此时RBR寄存器存储的就是当前可读字节。
写入字节
hpm_stat_t uart_send_byte(UART_Type *ptr, uint8_t c)
{uint32_t retry = 0;while (!(ptr->LSR & UART_LSR_THRE_MASK)) {if (retry > HPM_UART_DRV_RETRY_COUNT) {break;}retry++;}if (retry > HPM_UART_DRV_RETRY_COUNT) {return status_timeout;}ptr->THR = UART_THR_THR_SET(c);return status_success;
}不断查询LSR寄存器的UART_LSR_THRE_MASK是否置位(发送FIFO空),如果置位说明可写,此时写入THR寄存器就会传送给TX FIFO。
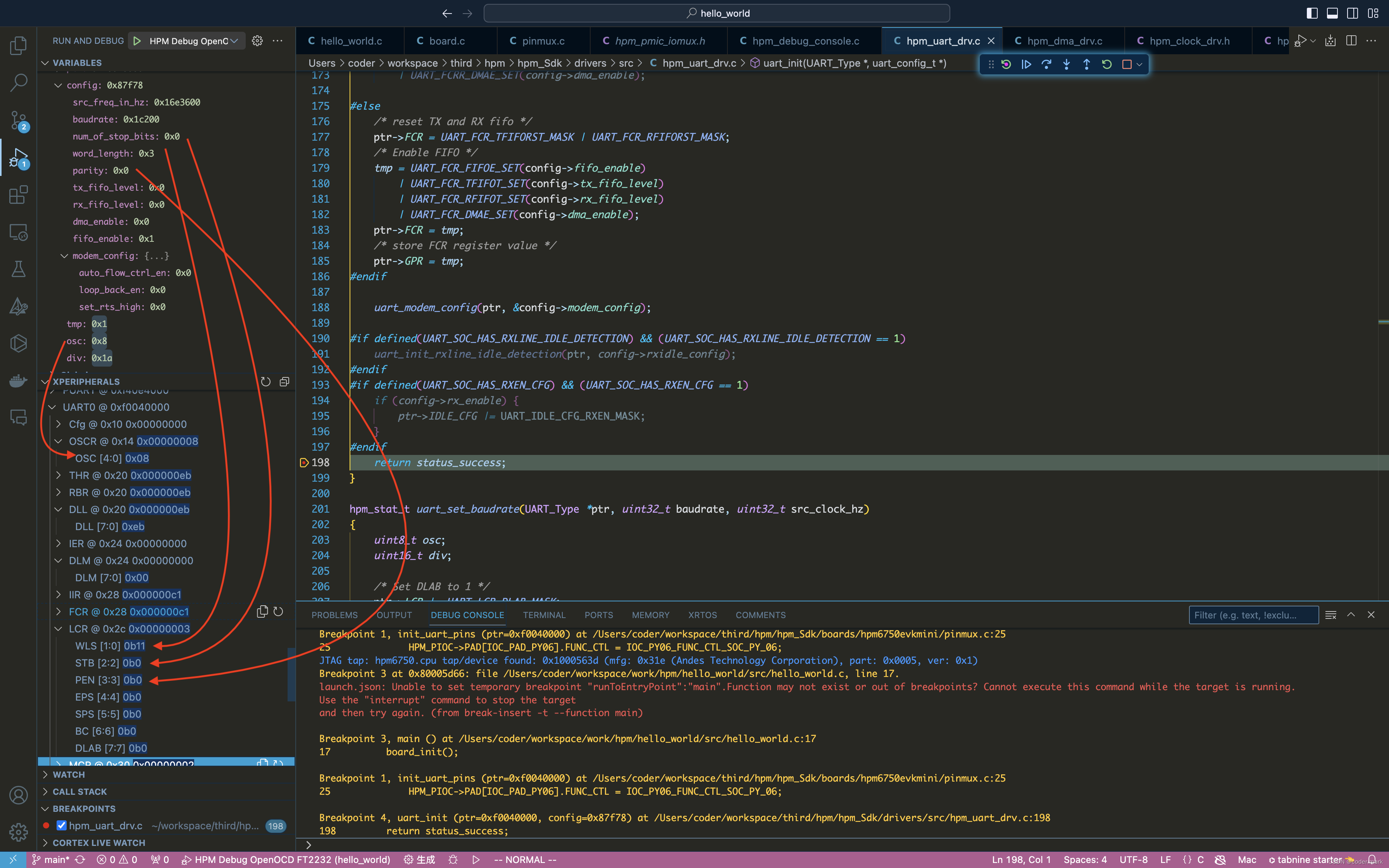
三、实战
VScode打开工程并进入调试窗口,在
cd ~/workspace/work/hpm/hello_world
code .

以上就是uart的基本内容,包括功能说明、引脚配置、时钟配置、轮询读写。
这篇关于HPM6750系列--第十一篇 Uart讲解(轮询模式)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




