本文主要是介绍DeepLabV3+实现sar影像海面溢油区识别,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
今天我们分享DeepLabV3+的sai影像水体提取。
数据集
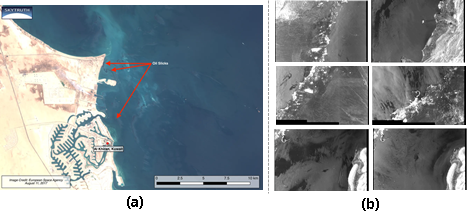
本次使用的数据集是Deep-SAR Oil Spill (SOS) dataset。该数据集由中国地质大学的朱祺琪团队制作并共享。该数据集包含墨西哥湾溢油区域和波斯湾溢油区域,分别获取于ALOS 和Sentinel-1A卫星。由ECHO研究组搜集制作,是溢油与非溢油的像素级数据集。其中来自墨西哥溢油区域的 3101 张样本用于模型训练,776 张样本用于测试。 来自波斯湾溢油区域的3354 张样本用于训练,839 张样本用于测试。 本次我们选取的是波斯湾溢油区的数据,并将训练数据按7:3划分为训练集与验证集。(sar影像为单通道,输入模型时按三通道读取) 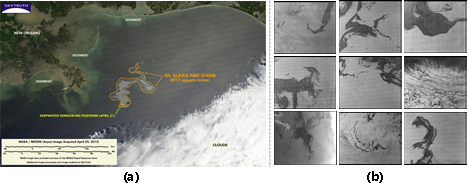
模型
此次我们使用的模型为deeplabv3+。Deeplabv3+是深度学习领域的一个语义分割模型,由Google的研究人员提出。它是在Deeplabv3的基础上进行改进和扩展的,通过添加一个简单的解码器模块来特别改善物体边界的分割结果。 Deeplabv3+模型的整体架构包括Encoder和Decoder两个部分。Encoder部分采用了带有空洞卷积的DCNN,并采用了空洞空间金字塔池化模块(ASPP)来引入多尺度信息。相比Deeplabv3,Deeplabv3+还引入了Decoder模块,将底层特征与高层特征进一步融合,提升分割边界准确度。 在具体的技术实现上,Deeplabv3+采用了深度可分离卷积,这是一种更快速和更强大的编码器-解码器网络。深度可分离卷积将卷积操作分为两个独立的步骤:首先是逐个输入通道进行卷积操作,然后再将卷积结果合并。这种技术可以有效地减少计算量和参数数量,提高模型的效率和性能。 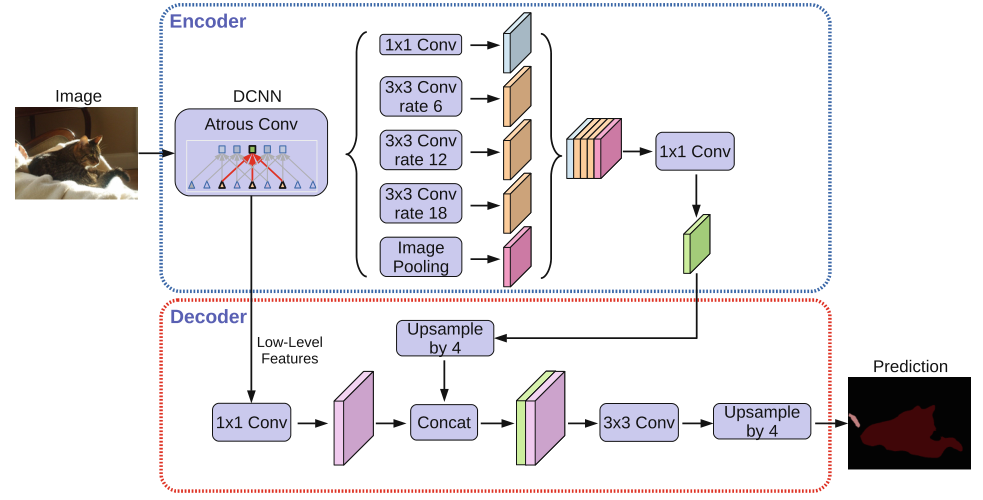
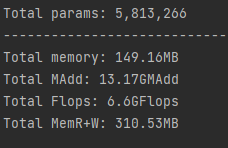
模型参数量
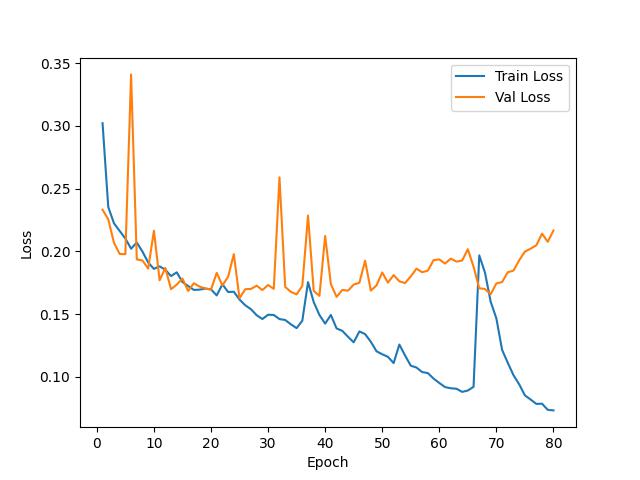
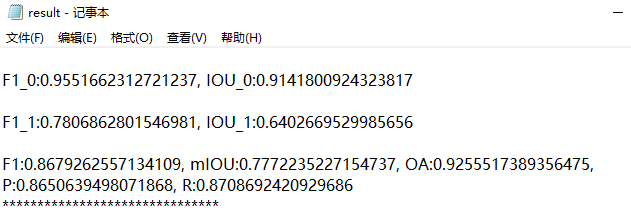
训练结果
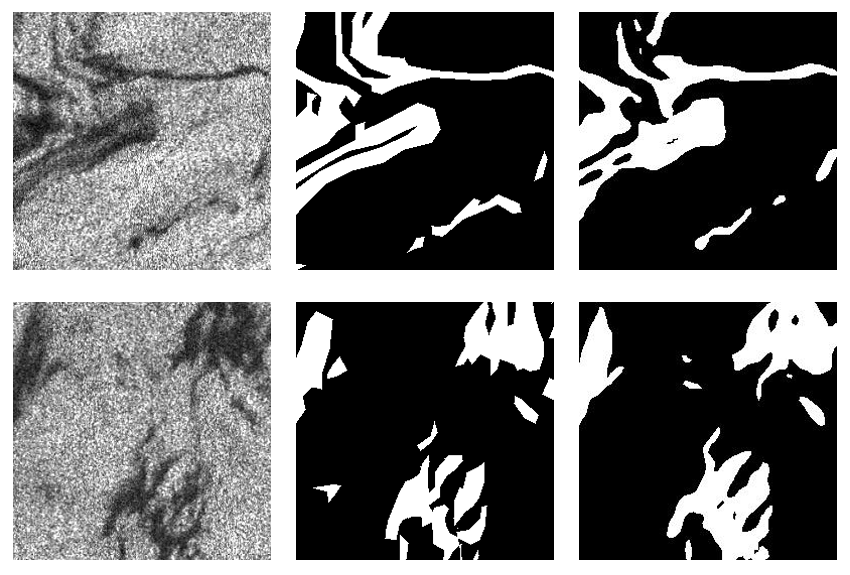
结果展示
总结
本期的分享就到这里,感兴趣的点点关注。如需要获取完整代码,训练结果等文章内所有内容,可加入我们星球,星球会持续更新相关的数据集与完整代码。  加入前不要忘了领取优惠券哦!
加入前不要忘了领取优惠券哦! 
「参考资料」
-
Q. Zhu, Y. Zhang, L. Wang, et. al., "A Global Context-aware and Batch-independent Network for road extraction from VHR satellite imagery," ISPRS Journal of Photogrammetry and Remote Sensing,2021,175:353-365.DOI:10.1016/j.isprsjprs.2021.03.016.
本文由 mdnice 多平台发布
这篇关于DeepLabV3+实现sar影像海面溢油区识别的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







