本文主要是介绍灵巧手操作模仿学习:DexMV,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
DexMV: Imitation Learning for Dexterous Manipulation from Human Videos解析
- 摘要
- 1. 简介
- 2. 相关工作
- 2.1 Dexterous Manipulation(灵巧操作)
- 2.2 Imitation Learning from Human Demonstrations(从人类示范中模仿学习)
- 2.3 Following Human Demonstrations(跟随人类示范)
- 2.4 Hand-Object Interaction(手物交互)
- 3. Overview
- 4. DexMV Platform
- 4.1 计算机视觉系统
- 4.2 仿真系统
- 4.3 任务描述
- 5. 姿态估计
- 5.1 物体姿态估计
- 5.2 手姿态估计
- 6. 演示转换(demonstration translation)
- 6.1 Hand Motion Retargeting
- 6.2 Robot Action Estimation
- 7. Imitation Learning
Manipulation from Human Videos解析)
论文链接:https://arxiv.org/abs/2108.05877
项目网址:https://yzqin.github.io/dexmv/
论文代码:https://github.com/yzqin/dexmv-sim
论文出处:2022 ECCV
论文单位:加州大学圣迭戈分校
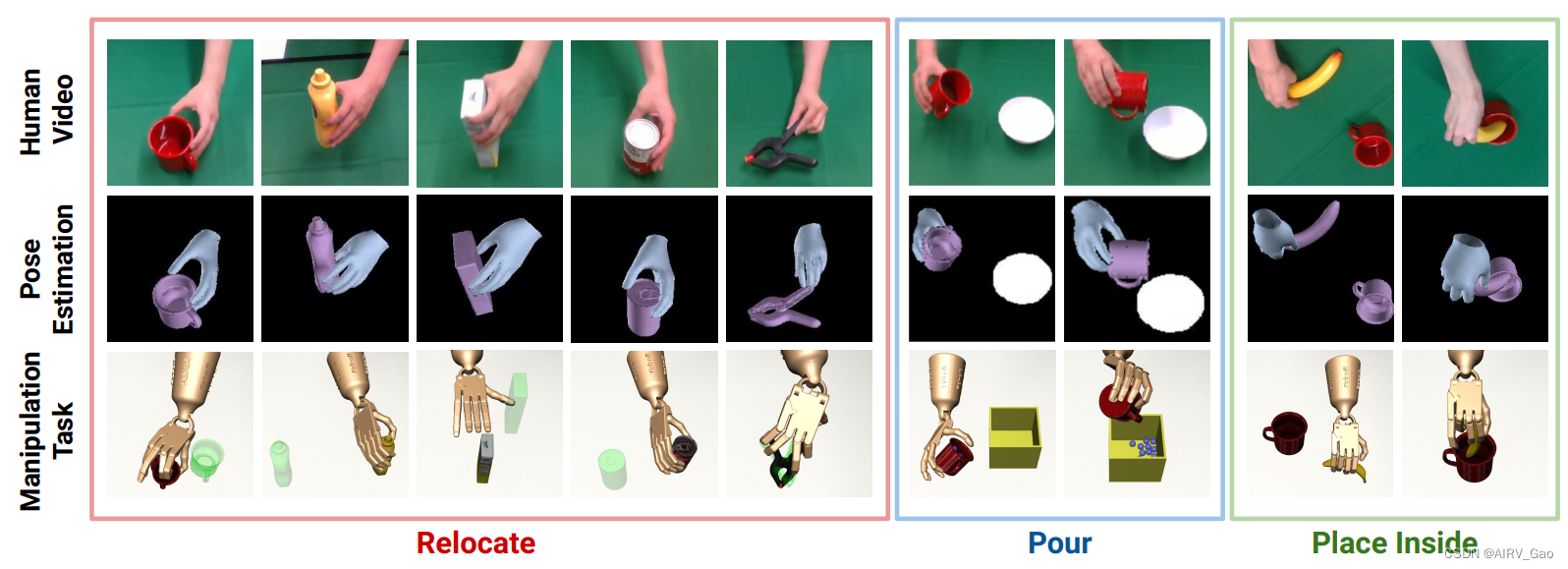
图1. 我们记录了关于操作任务的人类视频(第一行),并从视频(第二行)中执行3D手-对象姿态估计来构建演示。我们有一个配对的模拟系统,为多指机器人(第三排)提供相同的灵巧操作任务,包括:relocate, pour, 和 place inside,我们可以使用模仿学习(imitation learning) with 推断演示(inferred demonstrations) 来解决这些问题。
摘要
-
虽然计算机视觉在理解 手-物交互(hand-object interactions) 方面取得了重大进展,但对于机器人来说,进行复杂的灵巧操作仍然是非常具有挑战性的。
-
本文提出了一种新的模仿学习平台和 pipeline DexMV (Dexterous Manipulation from Videos)。
-
我们设计了一个平台,其中包括:
(i) 一个模拟系统,用于多手指机械手的复杂灵巧操作任务;
(ii)一个计算机视觉系统,用于记录大规模演示人手执行相同任务。 -
在我们的新 pipeline 中,我们从视频中提取3D手和物体的姿势,并提出了一种新的演示翻译方法,将人体运动转换为机器人演示。
-
然后,我们应用和比较基准多个模仿学习算法的演示。
-
我们表明,这些演示确实可以在很大程度上提高机器人的学习能力,并解决单独强化学习无法解决的复杂任务。
1. 简介
-
灵巧地操纵物体是人类与物理世界互动的主要手段。人类在各种各样的日常任务中进行着灵
这篇关于灵巧手操作模仿学习:DexMV的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!


