本文主要是介绍对普罗米修斯的本质的理解和分析,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
原本是直接对mavros话题进行赋值,普罗米修斯只是做了下封装,变为对类赋值,或者是一个统一的话题?再类把值给对应的mavros话题发出去。本质就是这样。所以用不用普罗米修斯都可以。(可能还需要再回顾讲清楚一点)
切模式
比如对无人机的控制或者期望指令信息先都统一赋值给这个话题,普罗米修斯的代码再帮你把这些期望指令信息分解到各个对应的mavros话题上面,发给飞控。
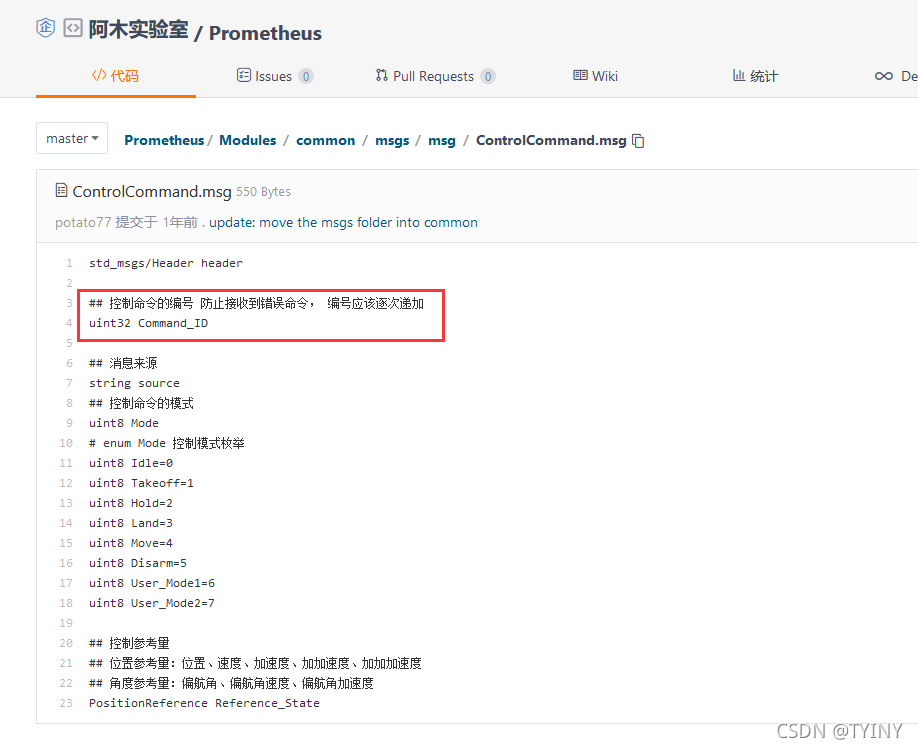
Modules/common/msgs/msg/ControlCommand.msg · 阿木实验室/Prometheus - Gitee.com

获取飞控的各种状态信息也是的,原本是自己订阅各种mavros话题,现在只不过是普罗米修斯帮你订阅各种mavros话题,并帮你都放到一个统一的话题的里面,这样你只需要订阅这么一个话题,这也也就变成了我们原本要发多个mavros话题和订阅多个mavros话题,现在变成统一只发布一个话题,订阅一个话题就OK了。这样可能更方便了些,但是你清楚本质不用也可以。
Modules/common/msgs/msg/DroneState.msg · 阿木实验室/Prometheus - Gitee.com

还有一个是切land,实际可能操作复杂或者多一点,由于普罗米修斯的封装,你只需要给那个统一话题里面的模式赋值land,它具体帮你分解成各个细节去做,这个可能也是方便的地方。(当然自己不用普罗米修斯,又不想这么复杂,可以现实中手动退出offboard然后手动降落)
并且还有一个终端给你显示出无人机的各种状态信息,期望指令,也是比较方便,但其实也是可以自己写。
所以本质只要你清楚用哪些MAVROS话题,就可以了,实现对无人机的控制或者或许无人机的飞控的一些信息。
自己保证以一定频率发送过去。
为什么要cmmand计数加一呢。为什么要加一我发现这里有专门的注释
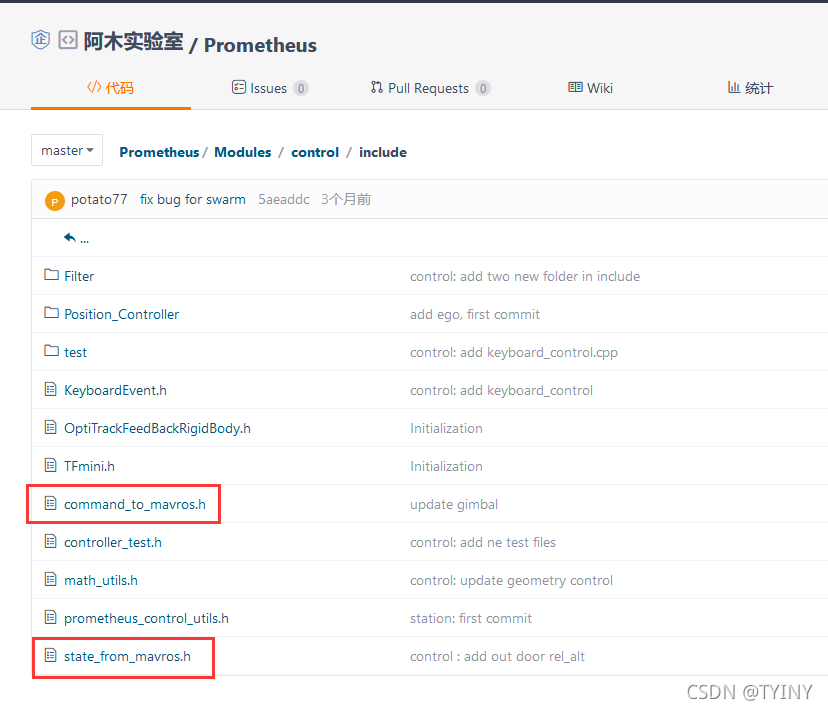
对于初学普罗米修斯的人,我之前也说过,只需要把这四个文件啃透,看普罗米修斯就会轻松很多。也就大体清楚了其本质。
无论上层的应用多复杂,最后都是分解成给无人机发送期望位置或者速度,之前还没有发送期望姿态也可以发送期望姿态。明白这个,你就可以把一些高层应用移植进来,比如astar避障或者egoplanner或者二维码降落,圆框跟踪等等的,最后本质都是给无人机发送期望位置或者期望速度,或者期望姿态(很少),之前的普罗米修斯基本就是发送期望位置或者期望速度。发送期望速度的情况一般是在有闭环控制的情况下,一般是在跟踪的时候,比如二维码降落或者圆框跟踪,这两者的本质都是跟踪,一个对二维码的跟踪一个对圆框的跟踪。指点,astar避障都是实际给无人机发送的期望位置点。
所以清楚本质是可以不用普罗米修斯或者px4_command,是可以自己写的,我之前就看到厦大的人自己写了,也确实可以自己写。
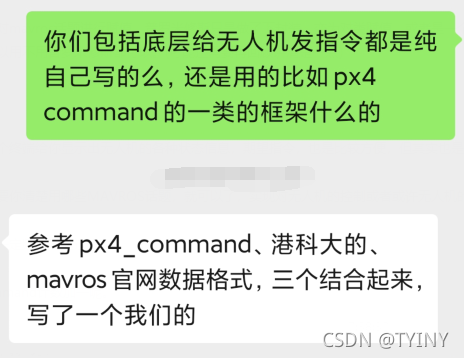
让我想起肖昆做XTDrone的初衷说用了别人的不太好用,可能当初写普罗米修斯或者px4_command的初衷也是单纯用mavros的各种话题比较繁琐,就干脆自己写一个统一的。我觉得这种想法就比较好,可能很多创新或者产品就是这么冒出来的,觉得别人的或者现有的不太好。
可能就像自己清楚SLAM本质之后,觉得也没什么,不过是个最优化最优估计,我用不用别人现成的都可以,自己去运用那些基础的技术去解决,就像感觉普罗米修斯本质可能就是对Mavros话题的一些封装,不过如此,没有说之前看到的那么高大上。
可能我现在看SLAM就不是SLAM,而是什么PNP+最优估计等等的,现在看普罗米修斯也不是普罗米修斯,而是本质还是mavros那些,给无人机发送一些对应期望信息,只不过做了层封装,就像SLAM本质就是对那些原本基础的技术打包了一下,叫SLAM,初学者看着感觉高大上,以为是个新东西,其实都是已有的东西。
而且现在也知道,单靠会普罗米修斯是没法吃饭的,因为清楚本质后就这么点东西,
因为本质还是Mavros那些,所以靠这点东西肯定不够的,无法构建自己核心竞争力,想继续深入,就得去真正研究一些具体的算法,比如SLAM,多传感器融合,或者去扫描路径规划等等的,不能说停留在普罗米修斯层面,单纯说自己会用普罗米修斯。
2021.9.24
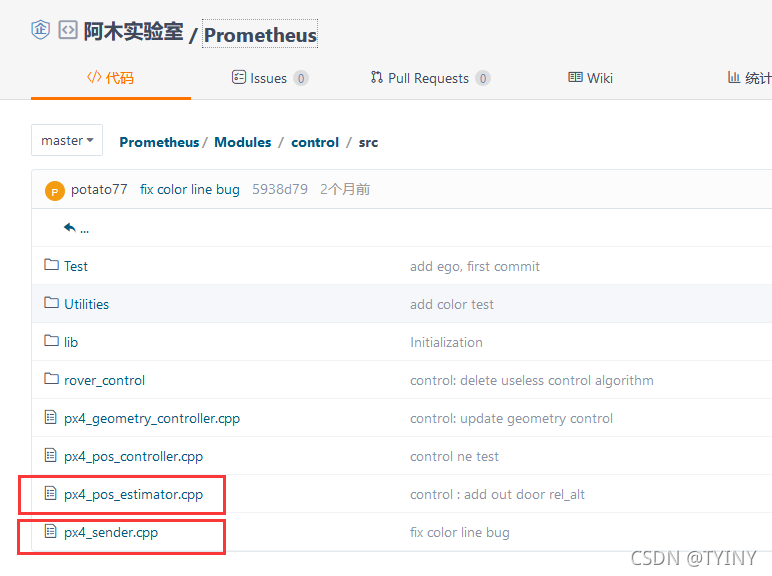
用普罗米修斯开发自己的功能,只需要给px4 sender发送期望位置期望速度切模式等等的就可以了。
然后通过px4_pos_estimate获得一些信息,其他的可以自己写。
关键还是那四个文件,其他的都可以自己写。
这篇关于对普罗米修斯的本质的理解和分析的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







