本文主要是介绍linux系统的u盘/mmc/sd卡等的支持热插拔和自动挂载行为,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1.了解mdev
mdev是busybox自带的一个简化版的udev。udev是从Linux 2.6 内核系列开始的设备文件系统(DevFS)的替代品,是 Linux 内核的设备管理器。总的来说,它取代了 devfs 和 hotplug,负责管理 /dev 中的设备节点。同时,udev 也处理所有用户空间发生的硬件添加、删除事件,以及某些特定设备所需的固件加载。比如,当我们插入U盘后udev会自动在/dev下创建设备节点,同时将U盘挂载到系统中;当拔掉U盘后,udev又会自动删除/dev下U盘的设备节点以及挂载的目录。mdev是udev的简化版,因此它的工作和udev是相同的。
mdev需要内核sysfs的支持。为了使用动态更新的功能,同要需要配置内核支持热拔插。
要使用mdev功能,应在编译busybox时在menconfig的Linux System Utilities中勾选上支持mdev的选项以及在编译kernel时勾选上支持hotplug。如果你对mdev的配置方法不熟悉,请:
一定要看docs/mdev.txt和examples/mdev.conf
关于初始化脚本的详细内容请参阅busybox的docs/mdev.txt文件,里面有详细的介绍,
下面这张图片,展示几个关键的内容
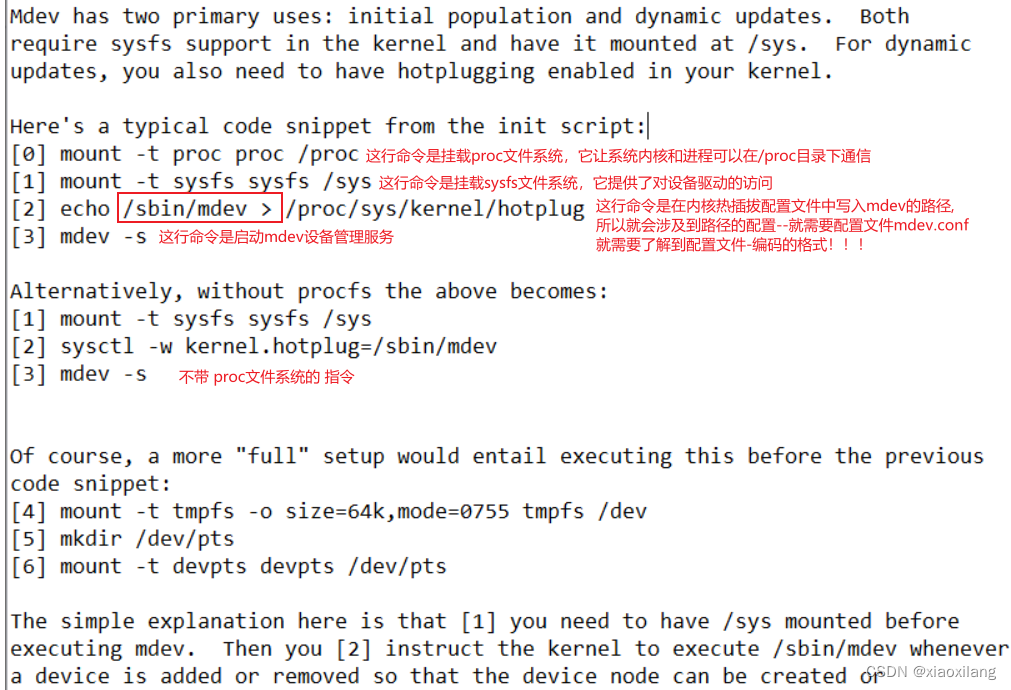
linux的内核的第一个程序是/etc/init.d/rcS
2.配置1
我的配置如下 /etc/init.d # cat rcS
#!/bin/sh
/bin/mount -t proc none /proc
/bin/mount -t sysfs sysfs /sys
/bin/mount -t ramfs /tmp
/bin/mount -t ramfs /mnt
#/bin/mkdir /mnt/pts
#/bin/mount -t devpts devpts /dev/pts
/bin/echo > /dev/mdev.seq
/bin/echo /bin/mdev > /proc/sys/kernel/hotplug
/bin/mdev -sinsmod /usr/drivers_demo/mpu6050d.ko
source /etc/profile
3.配置2
/bin/echo /bin/mdev > /proc/sys/kernel/hotplug的运行之前,需要配置脚本的路径
这样,系统启动时执行了命令echo /sbin/mdev > /proc/sys/kernel/hotplug,当那么当有热插拔事件产生时,内核就会调用位于/sbin目录的mdev。这时mdev通过环境变量中的 ACTION和DEVPATH(这两个变量是系统自带的)来确定此次热插拔事件的动作以及影响了/sys 中的那个目录。接着会看看这个目录中是否有" dev "的属性文件,如果有就利用这些信息为这个设备在/dev下创建设备节点文件。
# cat /etc/mdev.conf
mmcblk([0-9]+)p([0-9]+) 0:0 660 */sbin/automount.sh $MDEV X${ACTION}
mmcblk([0-9]+) 0:0 660 */sbin/automount.sh $MDEV X${ACTION}
sd([a-z]+)([0-9]+) 0:0 660 */sbin/automount.sh $MDEV X${ACTION}
sd([a-z]+) 0:0 660 */sbin/automount.sh $MDEV X${ACTION}
#mtdblock([0-9]+) 0:0 660 */sbin/automount.sh $MDEV X${ACTION}
for usb: sd[a-z][0-9]
for sd/mmc card:mmcblk[0-9]p[0-9] 0:6
指令:<device regex> <uid>:<gid> <octal permissions> [<@|$|*> <command>]
特殊字符的意义如下:
@:在创建设备节点后运行命令。
$:在删除设备节点前运行命令。
*:在创建设备节点和删除设备节点前都运行命令。
Command :对应的shell—般位于letc/mdev目录
为了利用脚本(如Shell脚本automout.sh)实现u盘在嵌入式系统上的自动挂载,在mdev规则文件/sbin/automount.sh中加入以下一行匹配规则使mdev在找到匹配行时可以执行用户自定义的命令( shell脚本中的内容):
sd[a-z][0-9]* 0:0 0600 */sbin/automount.sh $MDEV
4.脚本automount.sh
上一个配置已经指定脚本和路径,现在实现如下
# cat /sbin/automount.sh
#! /bin/sh# debugging message
#echo "MDEV=$1 : ACTION=$2 : SUBSYSTEM=$SUBSYSTEM : DEVPATH=$DEVPATH : DEVNAME=$DEVNAME" >> /dev/consoleif [ "$1" == "" ]; thenecho "parameter is none" > /tmp/error.txtexit 1
fiMNT=$1
#if [ $(echo $1 | grep mmcblk) ]; then
# if [ $(echo $1 | grep p[25]) ]; then
# MNT=sdcard2
# else
# MNT=sdcard
# fi
#elif [ $(echo $1 | grep sd) ]; then
# if [ $(echo $1 | grep p[25]) ]; then
# MNT=nandcard2
# else
# MNT=nandcard
# fi
#fi# there is no ACTION, it is for initial population
if [ "$2" = "X" ]; thenmounted=`mount | grep $1 | wc -l`if [ $mounted -ge 1 ]; then# mounted, assume the ACTION is remove#ACT=Xremove# only set add for initial populationACT=Xaddelse# not mounted, assume the ACTION is addACT=Xaddfi
elseACT=$2
fiif [ "$ACT" = "Xremove" ]; then# umount the deviceecho "$ACT /mnt/$1" >> /tmp/mdev.logif ! umount -l "/mnt/$1"; thenexit 1elserm -f "/mnt/$MNT"echo "[Umount FS]: /dev/$1 -X-> /mnt/$MNT" > /dev/consolefiif ! rmdir "/mnt/$1"; thenexit 1fi
else# mount the devicemounted=`mount | grep $1 | wc -l`#echo "par=$1,mounted=$mounted,MNT=$MNT" > /dev/consoleif [ $mounted -ge 1 ]; then#echo "device $1 is already mounted" > /dev/consoleexit 0fiif ! mkdir -p "/mnt/$1"; thenexit 1fiif [ $(echo $1 | grep mtd) ]; thenif mount -t jffs2 "/dev/$1" "/mnt/$1"; thenecho "[Mount JFFS2]: /dev/$1 --> /mnt/$MNT" > /dev/consoleecho "$ACT /mnt/$1" >> /tmp/mdev.logelif mount -t yaffs2 -o"inband-tags" "/dev/$1" "/mnt/$1"; thenecho "[Mount YAFFS2]: /dev/$1 --> /mnt/$MNT" > /dev/consoleecho "$ACT /mnt/$1" >> /tmp/mdev.logelif mount -t ubifs "/dev/$1" "/mnt/$1"; thenecho "[Mount UBIFS]: /dev/$1 --> /mnt/$MNT" > /dev/consoleecho "$ACT /mnt/$1" >> /tmp/mdev.logelse# failed to mount, clean up mountpointif ! rmdir "/mnt/$1"; thenexit 1fifielse# try vfat onlyif mount -t vfat -o noatime,shortname=mixed,utf8 "/dev/$1" "/mnt/$1"; thenln -s /mnt/$1 /mnt/$MNTecho "[Mount VFAT]: /dev/$1 --> /mnt/$MNT" > /dev/consoleecho "$ACT /mnt/$1" >> /tmp/mdev.logelse# failed to mount, clean up mountpointif ! rmdir "/mnt/$1"; thenexit 1fiexit 1fifi
fi
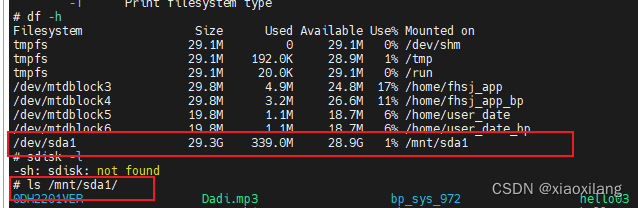
5.测试
6.如果我想把automount.sh放到其他地方,如何修改启动文件
自启动脚本添加如下内容
- 添加下面两条指令到mdev.conf:
sd([a-z]+)([0-9]+) 0:0 660 */home/fhsj_app/automount.sh $MDEV X${ACTION}"
sd([a-z]+) 0:0 660 */home/fhsj_app/automount.sh $MDEV X${ACTION}"
- 确保/home/fhsj_app/下面有automount.sh(或者是你自己的目录)的脚本且权限660以上
- 加入热插拔和自动挂载的指令
/sbin/echo /sbin/mdev > /proc/sys/kernel/hotplug
/sbin/mdev -s
我的自启动脚本如下:
awk '1; END {print "sd([a-z]+)([0-9]+) 0:0 660 */home/fhsj_app/automount.sh $MDEV X${ACTION}"}' /etc/mdev.conf > /tmp/mdev.conf && mv /tmp/mdev.conf /etc/mdev.conf
awk '1; END {print "sd([a-z]+) 0:0 660 */home/fhsj_app/automount.sh $MDEV X${ACTION}"}' /etc/mdev.conf > /tmp/mdev.conf && mv /tmp/mdev.conf /etc/mdev.conf
/sbin/echo /sbin/mdev > /proc/sys/kernel/hotplug
/sbin/mdev -s
这篇关于linux系统的u盘/mmc/sd卡等的支持热插拔和自动挂载行为的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







