本文主要是介绍Baumer工业相机堡盟工业相机如何通过BGAPISDK获取相机的各种信息如SN/ID等等(C++),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Baumer工业相机堡盟工业相机如何通过BGAPISDK获取相机的各种信息如SN/ID等等(C++)
- Baumer工业相机
- Baumer工业相机通过SDK获取相关生产信息的技术背景
- 通过SDK获取相机信息的代码分析
- 获取Baumer工业相机相关信息
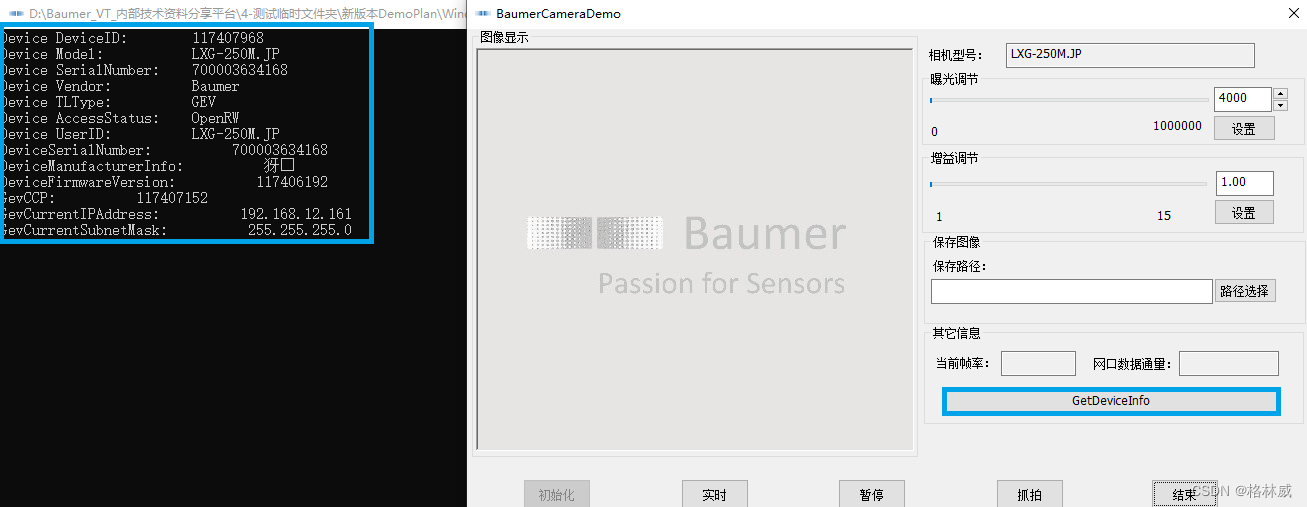
- Baumer工业相机相关参数信息获取的测试
- Baumer工业相机通过SDK获取相机相关信息的优势
- Baumer工业相机通过SDK获取相机相关信息的行业应用
Baumer工业相机
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运动分析和图像处理。
Baumer的万兆网相机拥有出色的图像处理性能,可以实时传输高分辨率图像。此外,该相机还具有快速数据传输、低功耗、易于集成以及高度可扩展性等特点。
Baumer GAPI SDK是由Baumer公司提供的软件开发工具包,专门为其工业相机产品定制而成。该SDK旨在为开发人员提供一系列功能强大的工具和接口,以便轻松地与Baumer的工业相机进行通信、图像采集和处理等操作。
Baumer工业相机的Camera Explorer软件功能强大,内容丰富,通过该软件可以有效的获取相机相关的全部信息,在对于相机检测项目的开发中,有时需要获取相机中图像Buffer信息和相关的数据流信息,而Camera Explorer软件可以有效的显示相关的信息。
Baumer工业相机通过SDK获取相关生产信息的技术背景
工业相机通过SDK获取相关生产信息涉及到多个技术背景。首先,工业相机通常配备高性能图像传感器和处理器,能够拍摄高质量的图像和视频。其次,SDK(Software Development Kit,软件开发工具包)则是由相机制造商提供的软件包,其中包含了与相机通信、图像处理等相关的API和工具。借助SDK,开发人员能够自定义相机的功能,如设定曝光时间、调整焦距等。
在获取相关生产信息方面,工业相机可以通过SDK与生产线上的其他设备进行集成,例如机器人、传感器和生产数据系统。这种集成使得工业相机能够捕获生产过程中的关键数据,并将其传输到生产信息系统中进行处理和分析。这些数据可能包括产品质量检测、物料追踪、生产效率等方面的信息。
因此,要实现工业相机通过SDK获取相关生产信息,开发人员需要深入了解工业相机的API和功能,以及与生产线集成的方式和数据传输协议。同时还需要考虑数据安全性和实时性等方面的要求,确保从相机获取的信息能够有效地支持生产过程的监控和优化。
通过SDK获取相机信息的代码分析
本文介绍使用BGAPI SDK对Baumer工业相机进行开发时,使用SDK获取Baumer工业相机相关信息、如SN、DeviceID、DeviceFirmwareVersion等等,从而能够做对应的参数设置和功能开发。
获取Baumer工业相机相关信息
C++环境下代码如下所示:
// Helper to Display various information of the camera
void GetDeviceInfo(std::ostream* log, BGAPI2::Device* const pDevice, const bool bOpen)
{*log << "5.1.7 Open device " << std::endl;*log << " Device DeviceID: " << pDevice->GetID() << std::endl;*log << " Device Model: " << pDevice->GetModel() << std::endl;*log << " Device SerialNumber: " << pDevice->GetSerialNumber() << std::endl;*log << " Device Vendor: " << pDevice->GetVendor() << std::endl;*log << " Device TLType: " << pDevice->GetTLType() << std::endl;*log << " Device AccessStatus: " << pDevice->GetAccessStatus() << std::endl;*log << " Device UserID: " << pDevice->GetDisplayName() << std::endl << std::endl;if (bOpen)pDevice->Open();*log << " Opened device - RemoteNodeList Information " << std::endl;*log << " Device AccessStatus: " << pDevice->GetAccessStatus() << std::endl;BGAPI2::NodeMap* const pRemoteNodeList = pDevice->GetRemoteNodeList();// Serial numberif (pRemoteNodeList->GetNodePresent("DeviceSerialNumber")) {*log << " DeviceSerialNumber: "<< pRemoteNodeList->GetNode("DeviceSerialNumber")->GetValue() << std::endl;} else if (pRemoteNodeList->GetNodePresent("DeviceID")) {*log << " DeviceID (SN): "<< pRemoteNodeList->GetNode("DeviceID")->GetValue() << std::endl;} else {*log << " SerialNumber: Not Available " << std::endl;}// Display DeviceManufacturerInfoif (pRemoteNodeList->GetNodePresent("DeviceManufacturerInfo")) {*log << " DeviceManufacturerInfo: "<< pRemoteNodeList->GetNode("DeviceManufacturerInfo")->GetValue() << std::endl;}// Display DeviceFirmwareVersion or DeviceVersionif (pRemoteNodeList->GetNodePresent("DeviceFirmwareVersion")) {*log << " DeviceFirmwareVersion: "<< pRemoteNodeList->GetNode("DeviceFirmwareVersion")->GetValue() << std::endl;} else if (pRemoteNodeList->GetNodePresent("DeviceVersion")) {*log << " DeviceVersion: "<< pRemoteNodeList->GetNode("DeviceVersion")->GetValue() << std::endl;} else {*log << " DeviceVersion: Not Available " << std::endl;}if (pDevice->GetTLType() == "GEV") {*log << " GevCCP: "<< pRemoteNodeList->GetNode("GevCCP")->GetValue() << std::endl;*log << " GevCurrentIPAddress: "<< pRemoteNodeList->GetNode("GevCurrentIPAddress")->GetValue() << std::endl;*log << " GevCurrentSubnetMask: "<< pRemoteNodeList->GetNode("GevCurrentSubnetMask")->GetValue() << std::endl;}*log << std::endl;
}void CGigeDemoDlg::OnBnClickedBtnpath2()
{if(m_pDevice!=NULL){printf( "Device DeviceID: %d\n" , m_pDevice->GetID()); printf( "Device Model: %s\n" , m_pDevice->GetModel());printf( "Device SerialNumber: %s\n" , m_pDevice->GetSerialNumber());printf( "Device Vendor: %s\n" , m_pDevice->GetVendor());printf( "Device TLType: %s\n" , m_pDevice->GetTLType() );printf( "Device AccessStatus: %s\n" , m_pDevice->GetAccessStatus());printf( "Device UserID: %s\n" , m_pDevice->GetDisplayName());BGAPI2::NodeMap* const pRemoteNodeList = m_pDevice->GetRemoteNodeList();// Serial numberif (pRemoteNodeList->GetNodePresent("DeviceSerialNumber")) {printf( "DeviceSerialNumber: %s\n" , pRemoteNodeList->GetNode("DeviceSerialNumber")->GetValue()); } else if (pRemoteNodeList->GetNodePresent("DeviceID")) {printf( "DeviceID (SN): %s\n" , pRemoteNodeList->GetNode("DeviceID")->GetValue()); } else {printf( "SerialNumber: Not Available" ); }// Display DeviceManufacturerInfoif (pRemoteNodeList->GetNodePresent("DeviceManufacturerInfo")){printf( "DeviceManufacturerInfo: %s\n" , pRemoteNodeList->GetNode("DeviceManufacturerInfo")->GetValue()); }// Display DeviceFirmwareVersion or DeviceVersionif (pRemoteNodeList->GetNodePresent("DeviceFirmwareVersion")) {printf( "DeviceFirmwareVersion: %d\n" , pRemoteNodeList->GetNode("DeviceFirmwareVersion")->GetValue()); } else if (pRemoteNodeList->GetNodePresent("DeviceVersion")) {printf( "DeviceVersion: %d\n" , pRemoteNodeList->GetNode("DeviceVersion")->GetValue()); } else {printf( "DeviceVersion: Not Available" ); }if (m_pDevice->GetTLType() == "GEV"){printf( "GevCCP: %d\n" , pRemoteNodeList->GetNode("GevCCP")->GetValue()); printf( "GevCurrentIPAddress: %s\n" , pRemoteNodeList->GetNode("GevCurrentIPAddress")->GetValue()); printf( "GevCurrentSubnetMask: %s\n" , pRemoteNodeList->GetNode("GevCurrentSubnetMask")->GetValue()); }}else{printf( "No Camera connected");}}Baumer工业相机相关参数信息获取的测试
Baumer工业相机通过SDK获取相机相关信息的优势
使用SDK(Software Development Kit)通过工业相机获取相关信息具有以下几个主要优势:
-
自定义和灵活性: SDK使开发人员能够自定义应用程序来满足设备特定的需求,例如设置相机参数,如曝光时间和白平衡等,这提供了极大的灵活性。
-
增强效能: 使用SDK利用工业相机的完整功能,可以控制相机的各种操作和设置,从而获取最佳的图像质量和性能。
-
快速开发和部署: 提供了清晰的API和功能库,通过减少开发所需的编程工作,可以帮助快速开发和部署应用程序。
-
集成和互操作性: SDK能够方便地和其他系统进行集成,例如用于数据分析和视觉处理的软件。这使得相机能够成为生产过程中的一个重要组成部分,支持从设备中获取更丰富、更有价值的信息。
-
设备升级和维护: 当新的相机模型或固件更新发布时,SDK通常会相应更新,以支持新的功能和改进。通过SDK获取信息,使得对设备的升级和维护变得更加容易。
-
调试和诊断: SDK通常还包含一些用于设备调试和性能优化的工具。比如,开发人员可以通过SDK获取相机状态的实时信息,从而诊断问题或优化性能。
Baumer工业相机通过SDK获取相机相关信息的行业应用
工业相机通过SDK获取相关信息的应用广泛,主要集中在视觉指导自动化、质量保证、安全监控等多个工业领域。以下是一些具体的应用实例:
-
质量检测与控制:许多制造业会利用工业相机来自动检测在生产线上的产品质量并获取相关信息。例如,SDK可以被用来设定检测阈值,导入检测算法,以此实现自动化的质量控制,提高生产效率。
-
机器视觉与自动化:在自动化设备如机器人中,工业相机可以借助SDK获取对象的位置信息,然后完成精准的定位、移动和操作。在工业生产中,这种功能非常有价值。例如,它可以用于产品分拣,组装工艺等等。
-
设备维护与故障诊断:通过使用SDK,可以提取工业相机获取的温度、震动等数据,预警设备维护需求或潜在的故障,防止设备的停机,保障生产流程的顺利进行。
-
工业测量与视觉导引:工业相机广泛应用于高精度测量和位置导向。SDK可以帮助开发人员制定精确的测量和跟踪算法,实现精确定位和测量。
以上只是一些示例。SDK可以让开发人员充分利用工业相机提供的强大功能,以满足各种工业应用需求。在实际应用中,这种能力使得工业相机成为许多现代自动化生产中不可或缺的一部分。
这篇关于Baumer工业相机堡盟工业相机如何通过BGAPISDK获取相机的各种信息如SN/ID等等(C++)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






