本文主要是介绍六、CM4树莓派USBRS转485串口通讯,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、串行通讯接口
串行通讯接口简称串口(UART)
采用串行通信方式的扩展接口,数据位一位一位的按照顺序传送
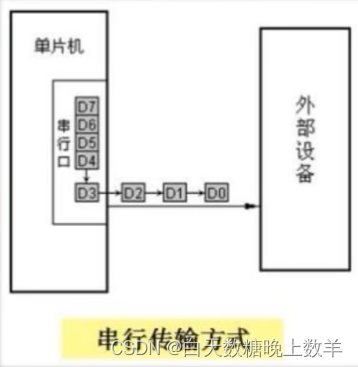
优点:通信线路简单,只要一对传输线就可以实现双向通信能够大大降低成本,适合远距离通信。
缺点:传输速度慢
二、树莓派的串口(UART)
树莓派3/4b的外设一共包含两个串口:
-
一个是硬件串口(/dev/ttyAMA0);
-
一个mini串口(/dev/ttyS0)
硬件串口由硬件实现,有独特的波特率时钟源,性能高、可靠;
mini串口性能低,功能简单
在树莓派上,引脚8(发送)和引脚10(接收)是作为主串口的收发端。
引脚8 被叫做TXD(Transmit Data)
引脚10 被叫做RXD(Receive Data)

树莓派的串口分类:
-
主串口——可以通过引脚实现通信;
-
辅助串口——不能使用GPIO引脚通信默认被分配给蓝牙端
注意:默认情况下,mini串口是禁用的,无论将它指定为主UART还是辅助UART

三、CM4树莓派USBRS转485串口通讯步骤
Step1:准备待调试的硬件串口
1.使用命令 ls/dev --al 查看串口打开情况
2.打开 minii UART

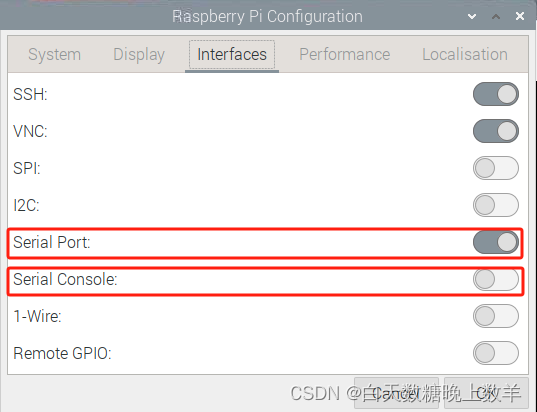
3.将硬件串口设置为主串口
sudo nano /boot/config.txt在该文件末尾添加上两行代码
dtoverlay=pi3-miniuart-bt
force_turbo=1
Ctrl + S 保存,Ctrl + X退出,再次重启树莓派后查看

4./boot/cmdline.txt文件配置
命令:
sudo nano /boot/cmdline.txt
在其中添加该句:
dwc_otg.lpm_enable=0 console=tty1 root=/dev/mmcblk0p2 rootfstype=ext4
fsck.repair=yes rootwait quiet spla>
5./boot/config.txt文件配置
命令:
sudo nano /boot/config.txt
在最后添加串口开启,并打开指定串口
enable uart=1
dtoverlay=pi3-miniuart-bt,core_freq=250
dtoverlay=uart4
dtoverlay=uart3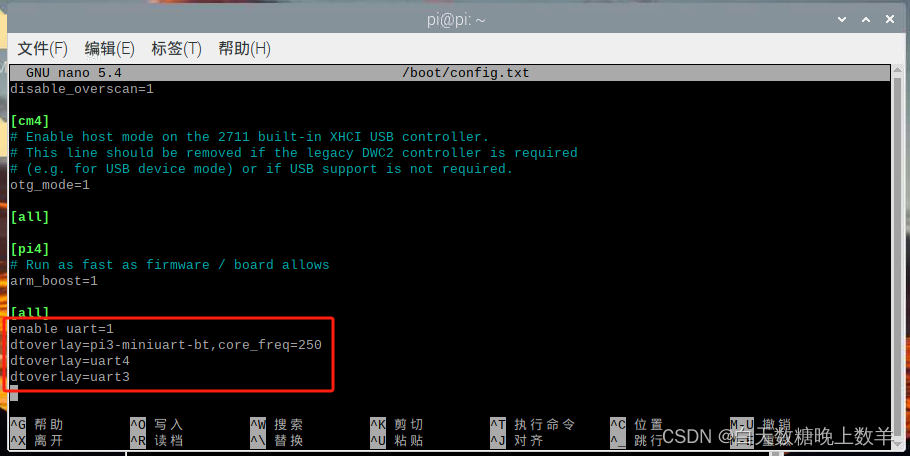
检查目前已经打开哪些串口
查看目前已经打开哪些串口命令:
ls /dev/ttyAMA*
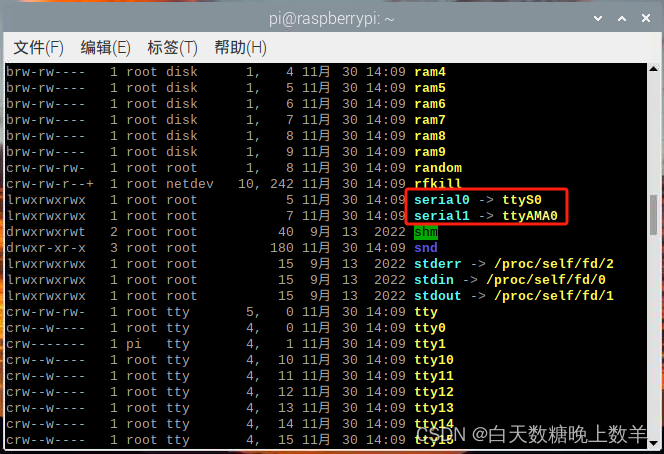
检查映射关系:
查看映射关系命令:
ls -l /dev/serial*
Step2:安装minicom串口助手
终端输入:sudo apt-get install minicom
Step3:电脑安装串口调试工具
XCOM软件下载![]() http://cdn.bettertree.cn/lovegeek/raspberry/XCOM%20V2.0.exe
http://cdn.bettertree.cn/lovegeek/raspberry/XCOM%20V2.0.exe

Step4:USB转RS485线路连接
注意接线口是否对应:A1B1

Step5:使用USB转RS485连接电脑和树莓派,开始通讯
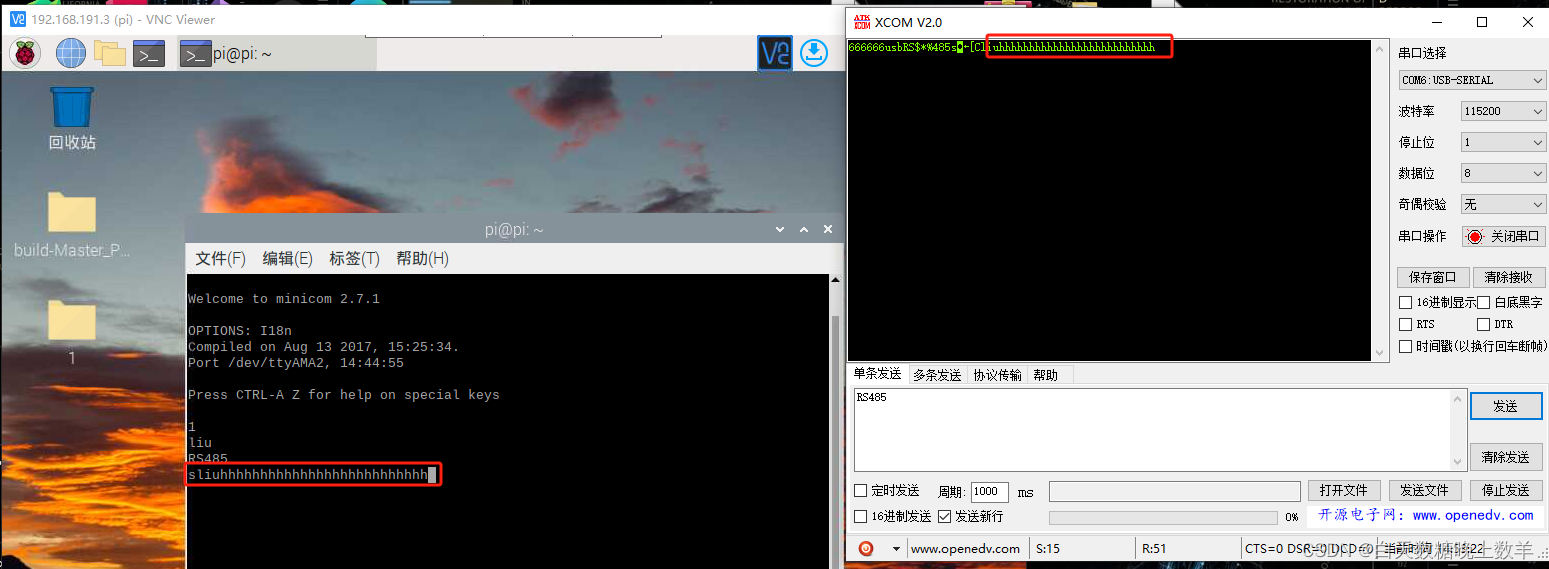
在树莓派中运行代码进入minicom空间
sudo minicom -D /dev/ttyAMA2
// 默认波特率为115200,-D代表端口,/dev/ttyAMA2 类似于windows中的COM口
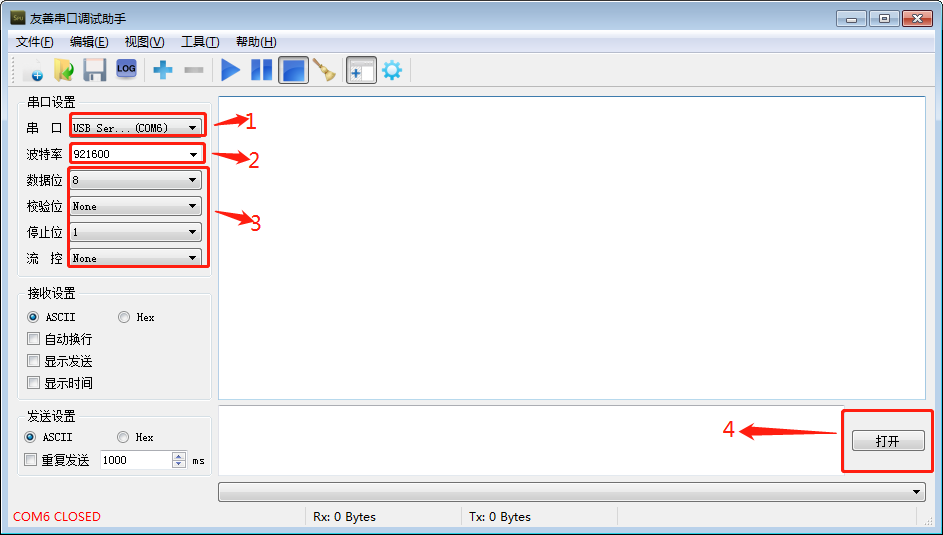
打开串口调试助手,选择相应配置

PC端——>树莓派
在PC端发送字符串,会在minicom的窗口显示出来

树莓派——>PC端
在minicom窗口输入字符串会自动发送至PC端,窗口默认不显示键盘输入的字符串

minicom使用技巧:
1、输入ctrl+A,再输入E,可以打开串口发送显示(默认是关闭的),再操作一遍则是隐藏显示
2、输入ctrl+A,再输入Q,Enter,可以退出minicom串口
这篇关于六、CM4树莓派USBRS转485串口通讯的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!