本文主要是介绍BearPi Std 板从入门到放弃 - 先天神魂篇(3)(RT-Thread I2C设备),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
简介
使用BearPi IOT Std开发板及其扩展板E53_SC1, SC1上有I2C1 的光照强度传感器BH1750 和 EEPROM AT24C02, 本次主要就是读取光照强度;
主板: 主芯片: STM32L431RCT6LED : PC13 \ 推挽输出\ 高电平点亮串口: Usart1I2C使用 : I2C1E53_SC1扩展板 : LED : PB9 \ 推挽输出 \ 高电平点亮光照强度传感器:BH1750EEPROM芯片 : AT24C02
步骤
- 创建项目
参考 BearPi IOT Std板 RT-Thread 工程创建 - 开启rt-thread i2c支持
rtconfig.h 文件中添加
/* rt-thread 开启i2c支持 */
#define RT_USING_I2C // RT-Thread开启I2C
#define RT_USING_I2C_BITOPS // RT-Thread 启用 I2C 位操作功能/* 注册i2c1设备 */
#define BSP_USING_I2C1 // 开启I2C1, 启用该块代码
#define BSP_I2C1_SCL_PIN 22 // i2c1初始化的时候使用
#define BSP_I2C1_SDA_PIN 23 // i2c1初始化的时候使用
-
env + 指令 scons --target=mdk5 -s 更新支持模块到Keil工程文件中
-
编译烧录
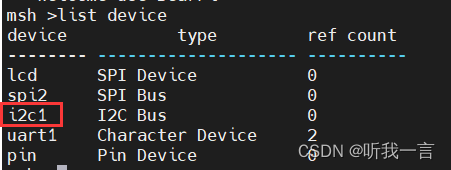
list device # 可以看到i2c1 设备了
-
添加使用代码
#include <board.h>
#include <rtthread.h>
#include <drv_gpio.h>
#ifndef RT_USING_NANO
#include <rtdevice.h>
#endif /* RT_USING_NANO */int main(void)
{struct rt_i2c_bus_device *i2c_bus; /* I2C总线设备句柄 */float lux = 0.0;uint8_t temp[2];uint8_t cmd = 0x11;rt_kprintf("---Welcome use BearPi---\n");
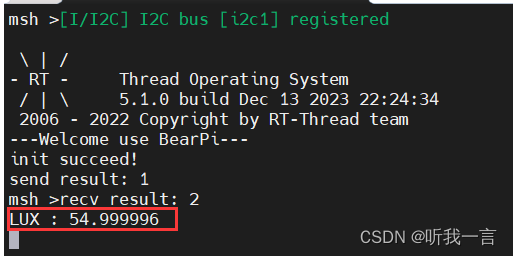
i2c_bus = (struct rt_i2c_bus_device *)rt_device_find("i2c1"); // 获取注册i2c1设备if (i2c_bus != RT_NULL){rt_kprintf("init succeed!\n");rt_kprintf("send result: %d\n", rt_i2c_master_send(i2c_bus, 0x23, RT_I2C_WR, &cmd, 1)); // 发送连续读H分辨率模式到BH1750rt_thread_mdelay(180); // 延时180msrt_kprintf("recv result: %d\n", rt_i2c_master_recv(i2c_bus, 0x23, RT_I2C_RD, temp, 2)); // 读取BH1750传来的光照强度数据/* 计算光照强度数据 */lux = (float)((temp[0]<<8)|temp[1]);lux /= (float)(1.2);rt_kprintf("LUX : %f\n", lux);}
}
- 编译烧录
- 串口打开, 复位查看
前言后说
-
读取BH1750地址差异
裸机API
HAL_I2C_Master_Transmit , DeviceAddress 是 0x46(写)
HAL_I2C_Master_Receive, DeviceAddress 是 0x47(读)
RT-Thread API
rt_i2c_master_send, Address 是 0x23
rt_i2c_master_recv, Address 是 0x23
两者的差异主要是裸机API中的设备地址包含了读/写位
0100011 0(包含写/读位) -> 0x46(写)
0100011 1(包含写/读位) -> 0x47(读)
0100011(不包含写/读位) -> 0x23 -
使用 rt_kprintf 打印不了浮点数
将 rt-thread/src/kservice.c 里面 rt_kprintf 实现函数中的
length = rt_vsnprintf(rt_log_buf, sizeof(rt_log_buf) - 1, fmt, args);
改为
length = vsnprintf(rt_log_buf, sizeof(rt_log_buf) - 1, fmt, args);
记得加上头文件和Keil中设置Micro Lib库支持
项目代码
参考
RT-Thread I2C总线设备
BearPi IOT Std板 RT-Thread 工程创建
BearPi Std 板从入门到放弃 - 先天神魂篇(2)(RT-Thread LED PWM驱动)
这篇关于BearPi Std 板从入门到放弃 - 先天神魂篇(3)(RT-Thread I2C设备)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





