本文主要是介绍学习笔记 --- LINUX MTD设备之NORFLASH驱动分析,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
之前文章分析了MTD的框架与NANDFLASH的驱动,NORFLASH也是MTD设备的一种,他的驱动和NANDFLASH差不多,也是内核帮我们完成了NOR操作协议层,内核提供的协议层接口是map_info结构体,我们要写一个新的NOR驱动就只需要填充这个协议接口。
1 标准内核的NORFLASH驱动配置(内核默认的NOR驱动)
其实大部分NORFLASH都一样,内核的前辈们已经帮我们设计好了NORFLASH的驱动,把不同厂商的NOR提取出最小差异,所以一般只要在标准的内核中进入内核配置菜单设置三项就可以了:
设置好了这三个,然后编译模块,insmod模块,就算完成了NORFLASH的驱动了
2 自己写一个NORFLASH驱动
步骤和NANDFLASH差不多,这里NOR主要设置好三项:
1 物理基地址
2 大小(设置为>=NORFLASH容量)
3 设置位宽(字节为单位)
/**参考drivers\mtd\maps\physmap.c
*/
#include <linux/module.h>
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/init.h>
#include <linux/slab.h>
#include <linux/device.h>
#include <linux/platform_device.h>
#include <linux/mtd/mtd.h>
#include <linux/mtd/map.h>
#include <linux/mtd/partitions.h>
#include <linux/mtd/physmap.h>
#include <asm/io.h>static struct map_info *s3c_nor_map;
static struct mtd_info *s3c_nor_mtd;
static struct mtd_partition s3c_nor_parts[] = { //4个分区,分区地址和uboot对应 [0] = { .name = "bootloader", .size = 0x00040000, .offset = 0, }, [1] = { .name = "params", .offset = MTDPART_OFS_APPEND, //接着上面结束地址 .size = 0x00020000, }, [2] = { .name = "kernel", .offset = MTDPART_OFS_APPEND, .size = 0x00200000, }, [3] = { .name = "root", .offset = MTDPART_OFS_APPEND, .size = MTDPART_SIZ_FULL, }
};
static int __init nor_init(void)
{/* 分配一个map_info结构体 */s3c_nor_map = kzalloc(sizeof(struct map_info), GFP_KERNEL);/* 设置上面分配的map_info结构体 */s3c_nor_map->name = "s3c_nor";//设置名字s3c_nor_map->phys = 0; //设置物理地址s3c_nor_map->size = 0x1000000;//设置norflash大小s3c_nor_map->bankwidth = 2;//设置位宽s3c_nor_map->virt = ioremap(s3c_nor_map->phys, s3c_nor_map->size);//将物理地址映射为虚拟地址simple_map_init(s3c_nor_map);//这里面设置了读写和擦除等函数printk("use cfi_probe\n");/* 调用NOR FLASH协议层提供的函数来识别 */s3c_nor_mtd = do_map_probe("cfi_probe", s3c_nor_map);if (!s3c_nor_mtd){printk("use jedec_probe\n");s3c_nor_mtd = do_map_probe("jedec_probe", s3c_nor_map);}if (!s3c_nor_mtd){ iounmap(s3c_nor_map->virt);kfree(s3c_nor_map);return -EIO;}/* 添加分区 */add_mtd_partitions(s3c_nor_mtd, s3c_nor_parts, 2);return 0;
}static void __exit nor_exit(void)
{del_mtd_partitions(s3c_nor_mtd);iounmap(s3c_nor_map->virt);kfree(s3c_nor_map);
}module_init(nor_init);
module_exit(nor_exit);
MODULE_LICENSE("GPL");上面可以知道和NAND最大的不同就是协议层的do_map_probe,这个函数第一个参数传入name,name就是不同norflash类型的名称,这里是cfi类型的norflash,还有一种是jedec类型的,前者通过CFI这样一个标准接口可以从NOR芯片上读出出硬件的信息,而不需要事先在结构体里面设置好,支持CFI接口的NOR移植起来就更加方便,而后者jedec型的就需要事先设置好NOR的信息结构体jedec_table,内核通过ID号比较得出NORFLASH匹配上的哪个结构体,再获取到这个NOR的信息,这种移植的时候就需要事先去设置好,不方便。内核支持这两种NOR的驱动,他们都通过register_mtd_chip_driver函数注册,对应的驱动程序在:cfi_probe.c与jedec_probe.c
下面分解这个函数:
do_map_probe("cfi_probe", s3c_nor_map);drv = get_mtd_chip_driver(name)ret = drv->probe(map); // cfi_probe.ccfi_probemtd_do_chip_probe(map, &cfi_chip_probe);cfi = genprobe_ident_chips(map, cp);genprobe_new_chip(map, cp, &cfi)cp->probe_chip(map, 0, NULL, cfi)cfi_probe_chip// 进入CFI模式cfi_send_gen_cmd(0x98, 0x55, base, map, cfi, cfi->device_type, NULL);// 看是否能读出"QRY"qry_present(map,base,cfi).....do_map_probe("jedec_probe", s3c_nor_map);drv = get_mtd_chip_driver(name)ret = drv->probe(map); // jedec_probejedec_probemtd_do_chip_probe(map, &jedec_chip_probe);genprobe_ident_chips(map, cp);genprobe_new_chip(map, cp, &cfi)cp->probe_chip(map, 0, NULL, cfi)jedec_probe_chip// 解锁cfi_send_gen_cmd(0xaa, cfi->addr_unlock1, base, map, cfi, cfi->device_type, NULL);cfi_send_gen_cmd(0x55, cfi->addr_unlock2, base, map, cfi, cfi->device_type, NULL);// 读ID命令cfi_send_gen_cmd(0x90, cfi->addr_unlock1, base, map, cfi, cfi->device_type, NULL); // 得到厂家ID,设备IDcfi->mfr = jedec_read_mfr(map, base, cfi);cfi->id = jedec_read_id(map, base, cfi);// 和数组比较jedec_match上面这个函数设置好协议层之后,就可以注册MTD设备了,这里也和NANFLASH一样使用了分区。
最后总结一下MTD设备:
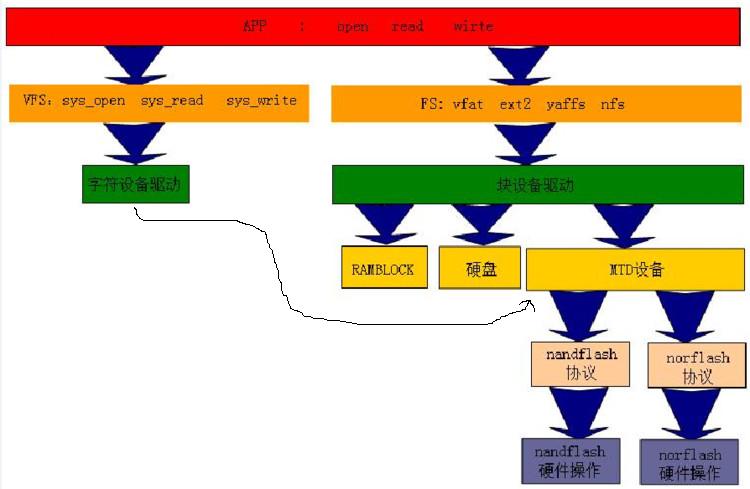
最上层APP操作文件,有两种情况:
1读写字符设备驱动文件(通过虚拟文件系统VFS)
2读写普通的文件系统的文件(通过文件系统)
第一个直接操作字符设备,而读写普通的文件系统文件(文件系统)就是操作块设备;
块设备下面有MTD设备,块设备驱动主要是做一些优化工作,MTD设备有NORFLASH和NANDFLASH,既支持块设备也支持字符设备的操作:
norflash协议层知道往某地址写某数据来实现识别、擦除和烧写等
norflash硬件操作就是用来实现一些硬件信息的设置,比如设置要地址、位宽什么的?以及设置读写函数。而我们写驱动程序要做的,就是实现这些最小的硬件差异,我们总结出来写norflash驱动程序的步骤:
(1)分配map_info结构体,并设置:物理地址,位宽,虚拟地址等
(2)设置读写函数,用默认函数即可
(3)调用NOR FLASH协议层提供的函数来识别:do_map_probe
(4)添加分区:add_mtd_partitions
顺便我们也来说一下nandflash的情况:
nandflash协议知道发什么来读写擦除,读写,识别
nandflash硬件操作知道怎么发地址命令/地址
也就是说在硬件层里面我们把协议层里面的读写擦除的条件准备好。而我们要做的就是在硬件操作里面准备好这些条件:
(1)分配nand_chip结构体,并设置它:这里面就是设置一些芯片参数
(2)硬件相关设置:这里主要就是设备芯片,使其可以正常被读写擦除等
(3)使用nand_scan:来扫描并且设置读,写函数,这些函数是内核实现好的,属于协议层
(4)add_mtd_partitions:添加分区
这篇关于学习笔记 --- LINUX MTD设备之NORFLASH驱动分析的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








