本文主要是介绍【i.MX6ULL】linux驱动bh1750模块,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
I2C-BH1750
1、设备地址
- 引脚说明
| VCC | 5V |
|---|---|
| GND | GND |
| SCL | PB6 |
| SDA | PB7 |
| ADDR | VCC/GND |
bh1750设备的地址由引脚 ADDR 来决定
-
ADDR接GND
当ADDR引脚接地时设备bh1750的地址为:0x23(7bit)
-
ADDR接VCC
当ADDR引脚接地时设备bh1750的地址为:0x5c(7bit)
2、工作模式
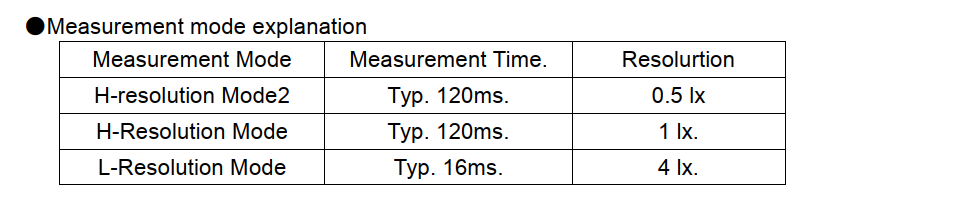
BH1750FVI模块共有六种工作模式:连续H-分辨率模式、连续H-分辨率模式2、连续L-分辨率模式、一次H分辨率模式、一次H分辨率模式2、一次性L分辨率模式
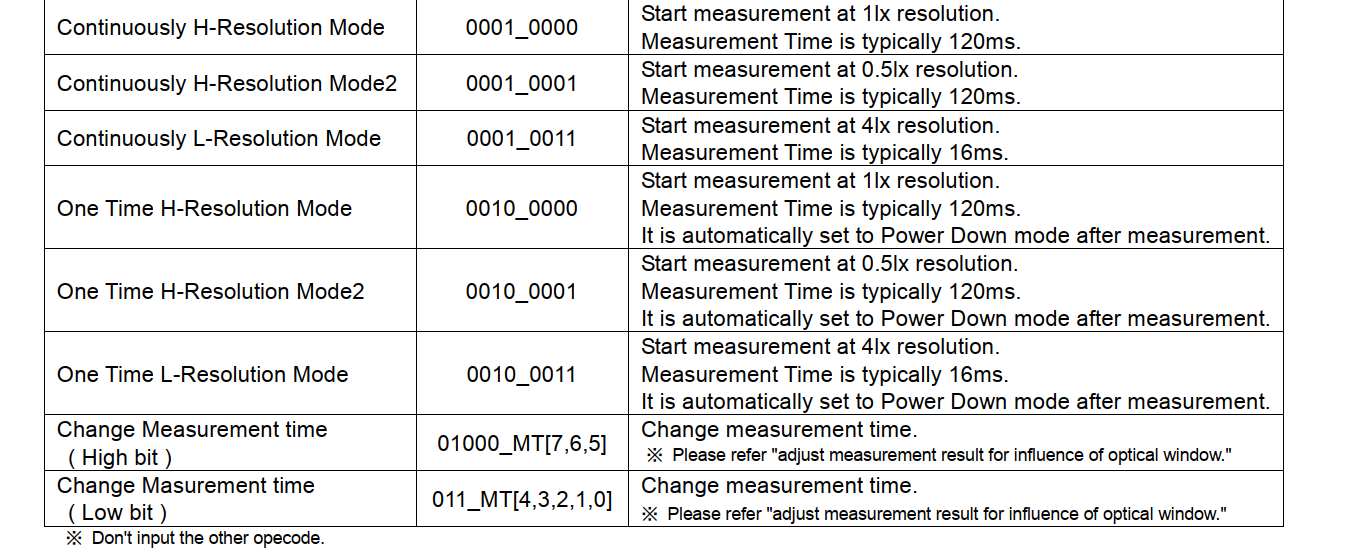
手册中建议使用 连续H-分辨率模式

连续H-分辨率模式 每次转换时间为120ms
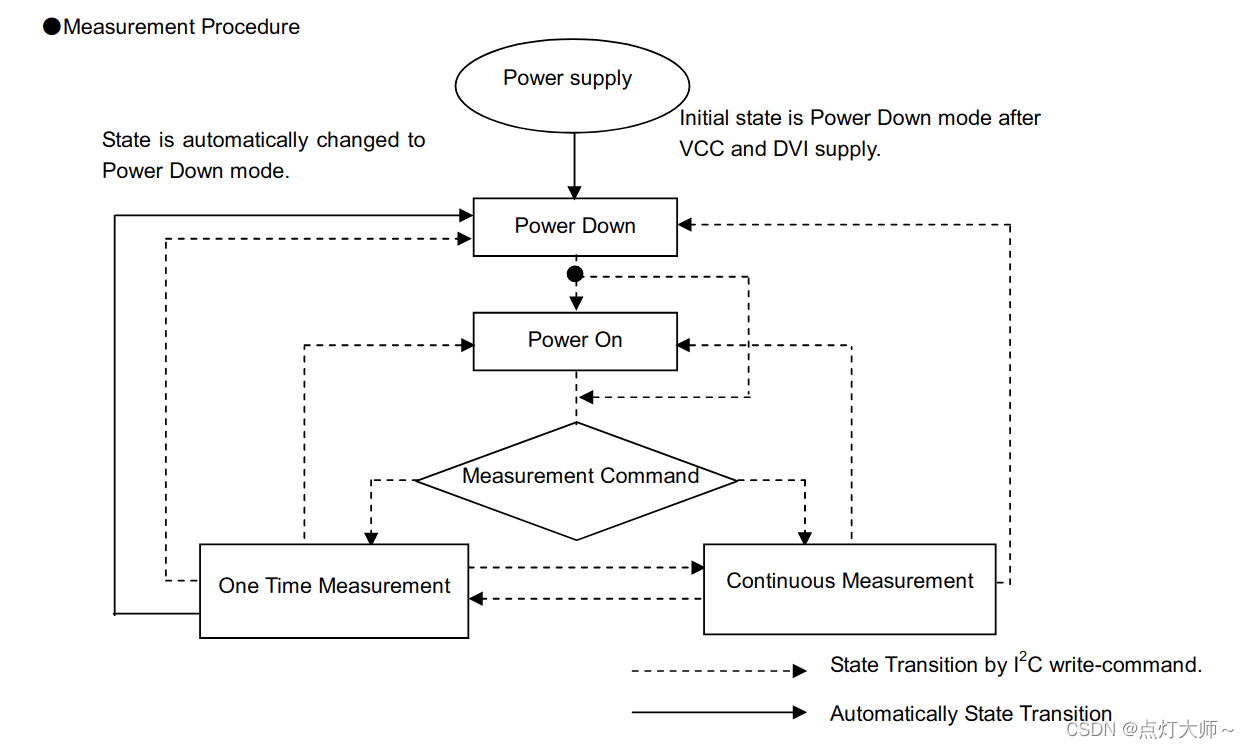
3、读取数据流程
每个芯片都有固有的读取数据流程,下面我们来看一下bh1750模块的读取流程,以连续H-分辨率模式为例大致流程为:通电指令 -> 工作模式指令 -> 获取数据
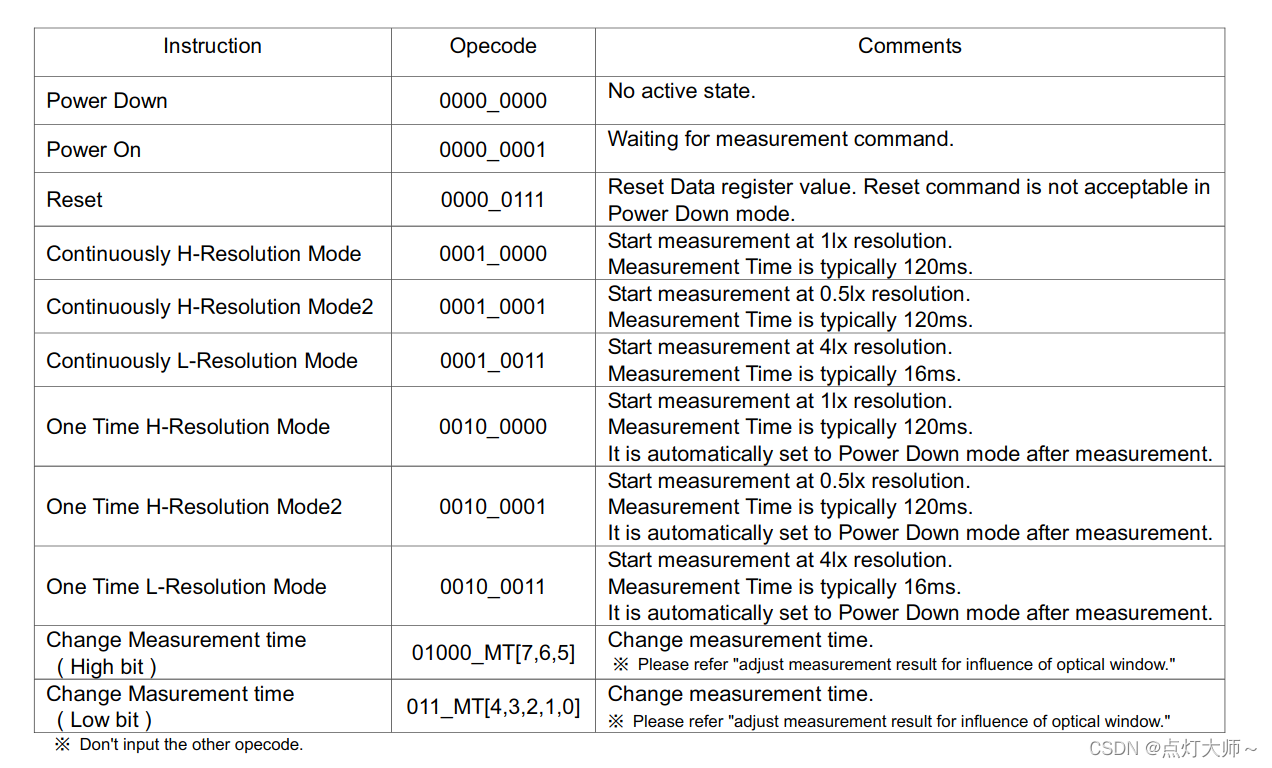
4、ROM指令
5、读写时序
以连续H-分辨率模式并且ADDR与GND相连的读写时序如下:
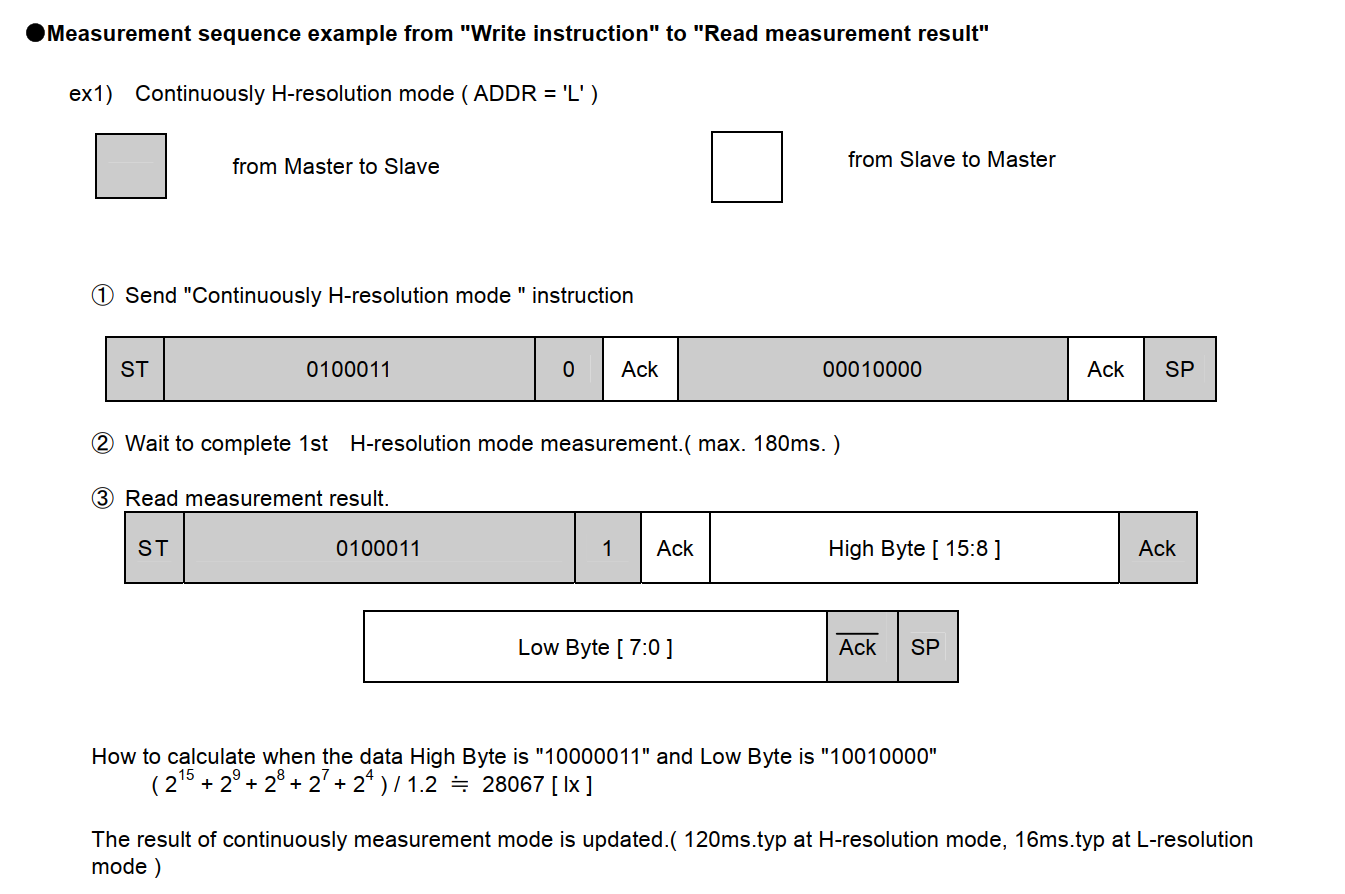
总上,读取数据全过程为:
第一步:通过I2C总线,主机给bh1750设备发送数据:0x01 ——> (Power on)
第二步:通过I2C总线,主机给bh1750设备发送数据:0x10 ——> (Continuously H-resolution mode)
第三步:通过I2C总线,主机读取设备bh1750采集到的数据
6、添加设备信息
找到开发板对应的设备树文件dts,在i2c1的节点下面添加bh1750设备信息(我这里将bh1750连接到了i2c1控制器下):
&i2c1 {clock-frequency = <100000>;pinctrl-names = "default";pinctrl-0 = <&pinctrl_i2c1>;status = "okay";bh1750@23 {compatible = "gy302,bh1750";reg = <0x23>;};
7、驱动代码
#include <asm-generic/errno-base.h>
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of_gpio.h>
#include <linux/semaphore.h>
#include <linux/timer.h>
#include <linux/i2c.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>
#include <linux/miscdevice.h>
#include "acpi/acoutput.h"
#include "asm-generic/int-ll64.h"
#include "linux/export.h"
#include "linux/printk.h"
#include "uapi/linux/i2c.h"
#include <linux/delay.h>//Rom指令
#define POWER_ON 0x01
#define H_RESOLUTION_MODE 0x10struct bh1750_device {void *private_data;
};static struct bh1750_device bh1750_dev;static int bh1750_read_regs(struct bh1750_device *dev, void *val, int len)
{int ret = 0;struct i2c_client *client = (struct i2c_client *)dev->private_data; struct i2c_msg msgs[1] = {[0] = { //寄存器的值.addr = client->addr,.flags = I2C_M_RD,.buf = val,.len = len,}};ret = i2c_transfer(client->adapter, msgs, 1);if (ret != 1) {printk("i2c rd failed=%d len=%d\n",ret, len);ret = -EINVAL;} else {ret = 0;}return ret;
}/* bh1750写数据 */
static int bh1750_write_regs(struct bh1750_device *dev, u8 *buf, u8 len)
{struct i2c_client *client = (struct i2c_client *)dev->private_data;u8 data[256];struct i2c_msg msgs;memcpy(data, buf, len);msgs.addr = client->addr;msgs.flags = 0;msgs.buf = data;msgs.len = len;return i2c_transfer(client->adapter, &msgs, 1);
}static void bh1750_write_reg(struct bh1750_device *dev, u8 data)
{int ret;ret = bh1750_write_regs(dev, &data, 1);if (ret != 1) {printk("i2c write fail: %d\n", ret);}
}/* bh1750字符集 */
int bh1750_open(struct inode *inode, struct file *file)
{bh1750_write_reg(&bh1750_dev, POWER_ON);bh1750_write_reg(&bh1750_dev, H_RESOLUTION_MODE);mdelay(200);return 0;
}ssize_t bh1750_read(struct file* filp, char __user* buf, size_t count, loff_t* ppos)
{u8 data[2];int err;bh1750_read_regs(&bh1750_dev, data, 2);err = copy_to_user(buf, data, sizeof(data));return 0;
}int bh1750_close(struct inode *inode, struct file *file)
{return 0;
}struct file_operations bh1750_fops = {.open = bh1750_open,.release = bh1750_close,.read = bh1750_read,
};struct miscdevice bh1750_misc = {.name = "bh1750",.fops = &bh1750_fops,.minor = 255,
};static const struct of_device_id bh1750_of_device_id[] = {{ .compatible = "gy302,bh1750" },{ /* END OF LIST */ }
};struct i2c_device_id bh1750_device_id[] = {{.name = "gy302,bh1750", },{ /* END OF LIST */ }
};int bh1750_probe(struct i2c_client *client, const struct i2c_device_id *dev)
{int ret;printk("%s %s %d\n", __FILE__, __FUNCTION__, __LINE__);ret = misc_register(&bh1750_misc);if (ret < 0) {printk(KERN_WARNING "ac.o: Unable to register misc device\n");goto MISC_REGISTER_FAIL;}/* 获得iic_client */bh1750_dev.private_data = client;printk("bh1750 addr: %#x\r\n", client->addr);return 0;MISC_REGISTER_FAIL:return ret;
}int bh1750_remove(struct i2c_client *client)
{printk("%s %s %d\n", __FILE__, __FUNCTION__, __LINE__);misc_deregister(&bh1750_misc);return 0;
}struct i2c_driver bh1750_driver = {.id_table = bh1750_device_id,.driver = {.owner = THIS_MODULE,.name = "bh1750",.of_match_table = bh1750_of_device_id,},.probe = bh1750_probe,.remove = bh1750_remove,
};/* 入口 */
static int __init bh1750_driver_init(void)
{return i2c_add_driver(&bh1750_driver);
}static void __exit bh1750_driver_exit(void)
{i2c_del_driver(&bh1750_driver);
}module_init(bh1750_driver_init);
module_exit(bh1750_driver_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("lighting master");应用层代码就你们自己写吧~
这篇关于【i.MX6ULL】linux驱动bh1750模块的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







