本文主要是介绍微机原理——定时器8253(8254)学习1,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
定时类型
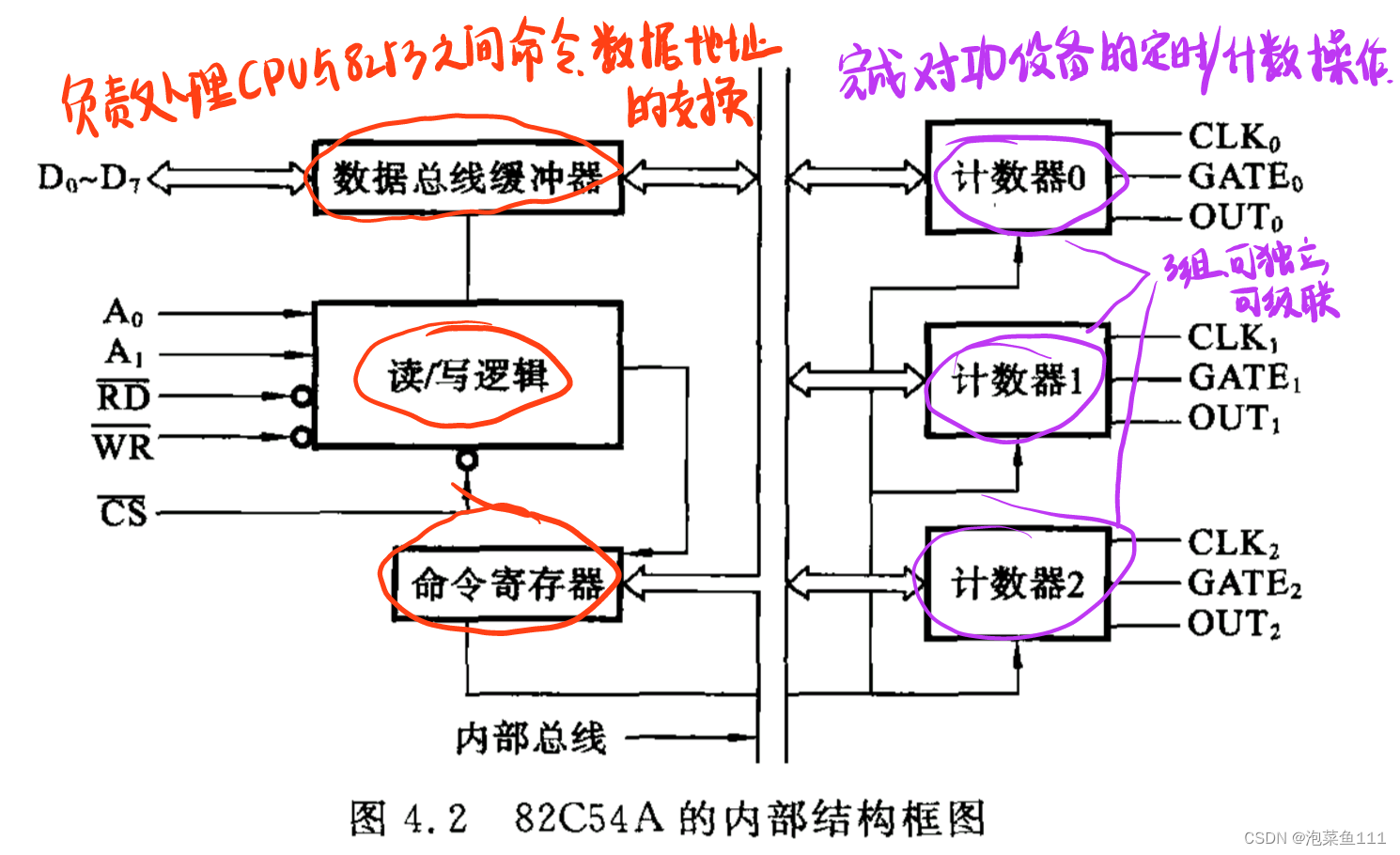
8253内部结构框图
8253命令字
六种工作方式及输出波形
计数初值的计算与装入
8253的初始化
定时类型
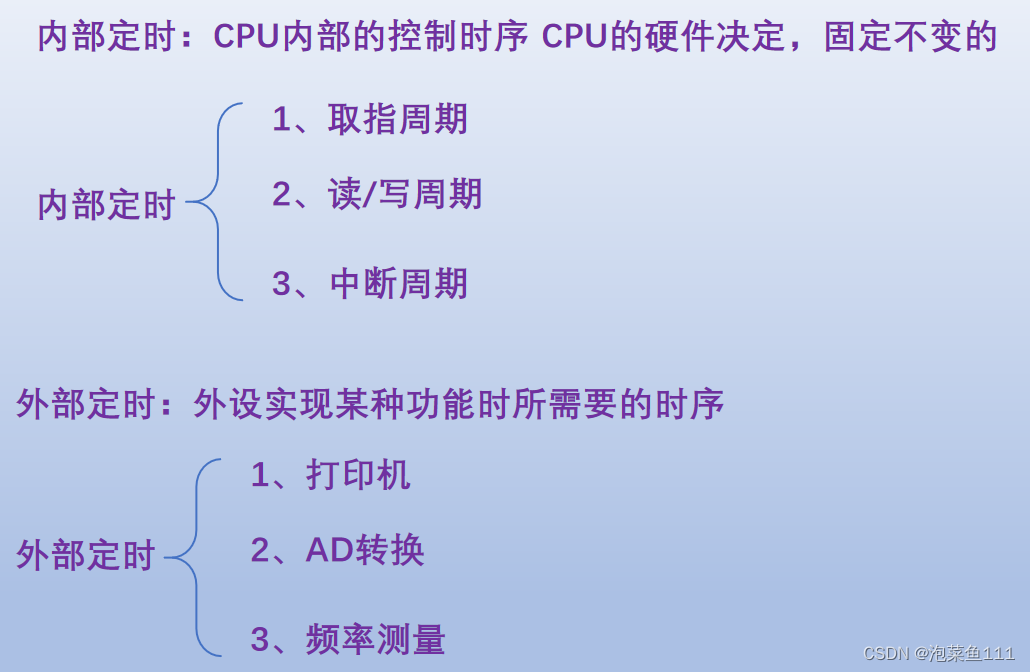
可编程定时器8253:(内部采用的是16位 减法计数器)
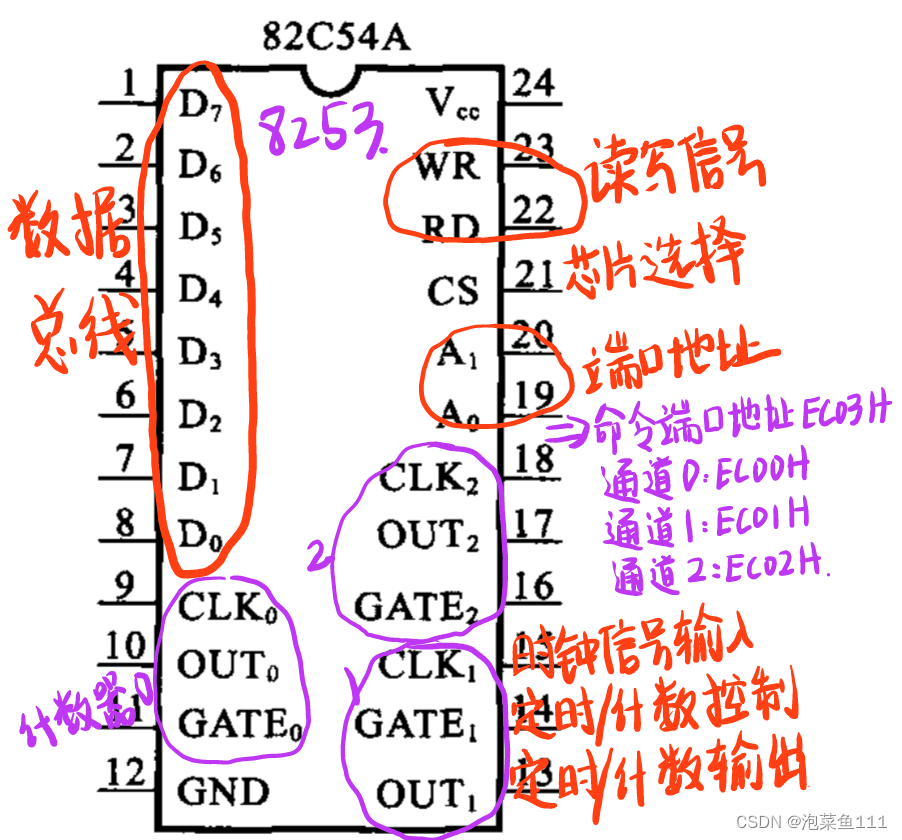
8253内部结构框图
8253命令字
8253有三个命令字:方式命令,锁存命令,读回命令。(三个命令共用一个端口,按方式命令在前,其他命令在后的顺序写入。)
方式命令格式: (方式命令用来初始化8253,所以必须使用,剩下两个根据需要使用)
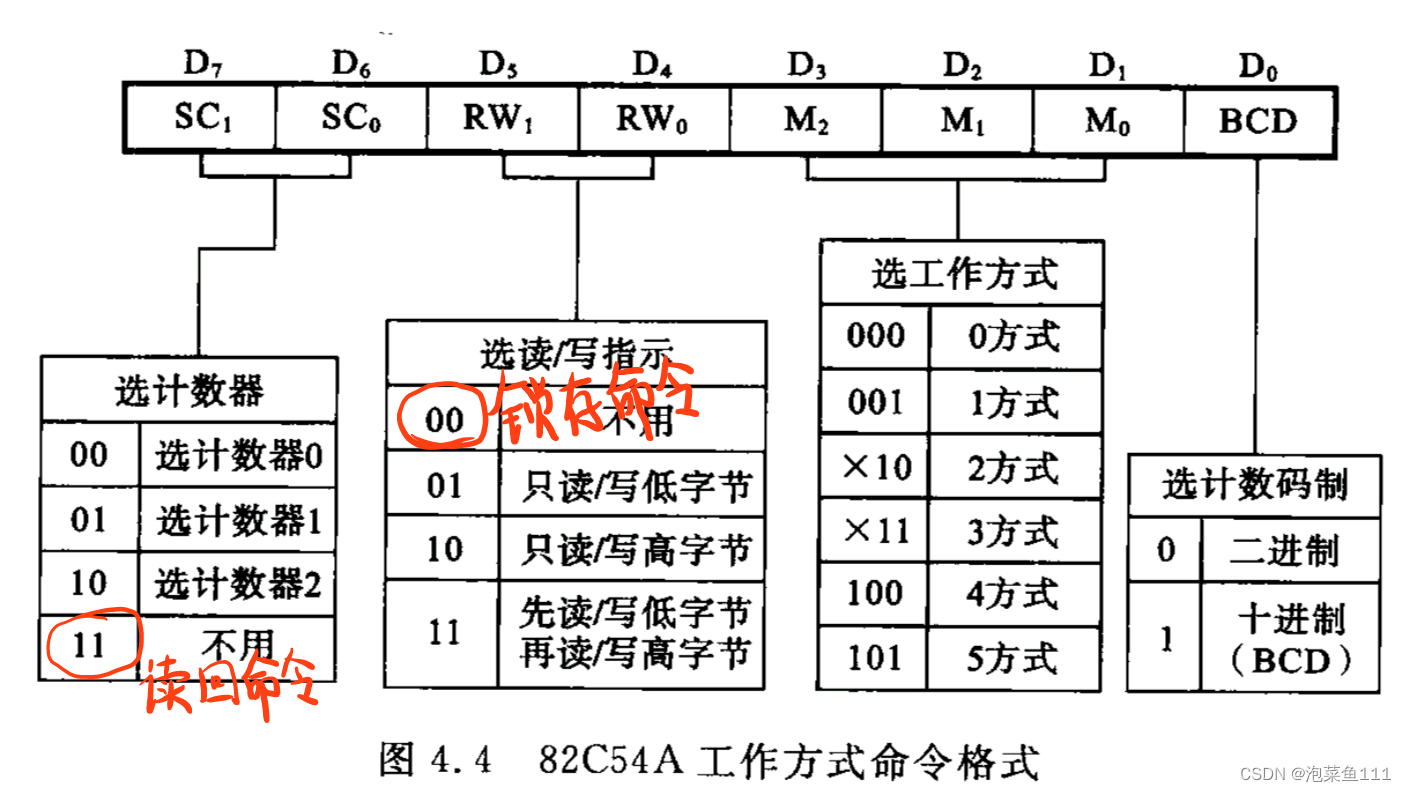
例:计数器1,只读/写低字节,方式1,二进制
01010010 52H
MOV A, 52H
MOV DPTR, #EC03H
MOVX @DPTR, A锁存命令格式: (在要求读取当前计数值时使用)
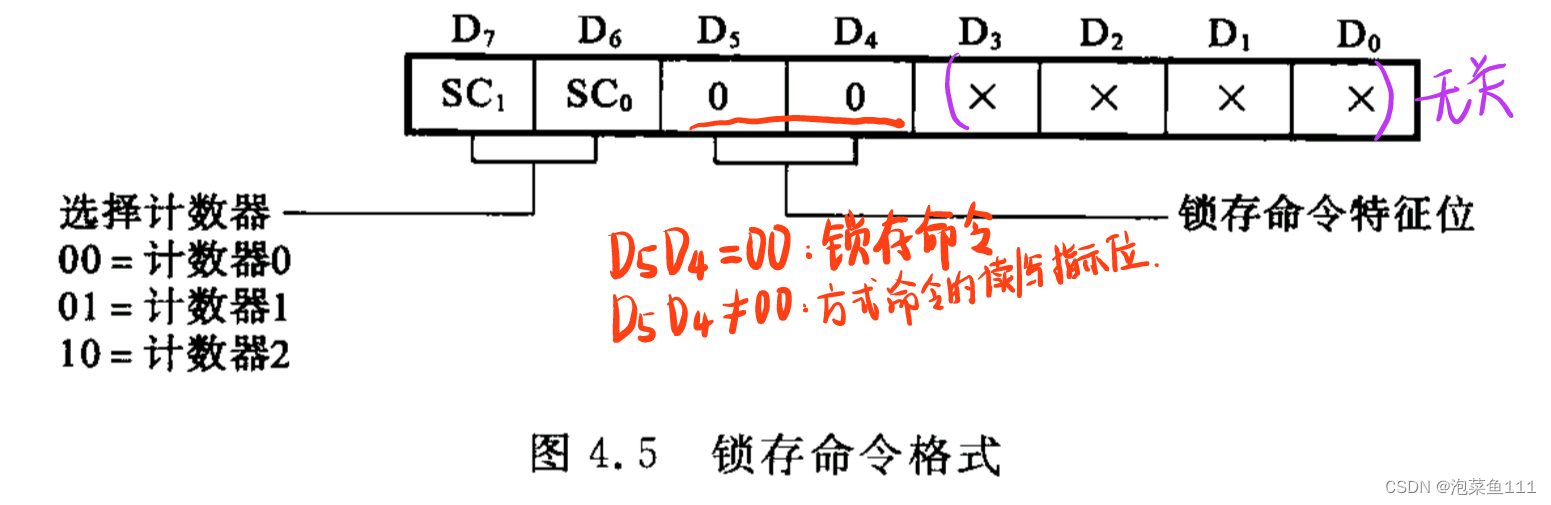
例:读计数器1的当前值,送到30H 31H中:01 00 0010 42H 方式1 二进制 MOV A, #42H
MOV DPTR, #EC03H 命令端口地址
MOVX @DPTR, AMOV DPTR, #EC01H 通道1
MOVX A, @DPTR
MOV 30H, AMOV DPTR, #EC01H 通道1
MOVX A, @DPTR
MOV 31H, A读回命令格式:(既能锁存计数值又能锁存状态信息,一条读回命令可以锁存3个计数器的当前计数值和状态)

读取计数器2的当前计数值:11011000
读取计数器2的当前状态: 11101000
读取计数器2的当前计数值和状态:11001000
读取全部3个计数器的当前计数值和状态:11001110读取计数器1的当前计数值,送到30H 31H中:1110 0010 E2H MOV A, #0E2H
MOV DPTR, #EC03H 命令端口地址
MOVX @DPTR, AMOV DPTR, #0EC01H 数据低八位
MOVX A, @DPTR
MOV 30H, AMOV DPTR, #0EC01H 数据高八位
MOVX A, @DPTR
MOV 31H, A六种工作方式及输出波形
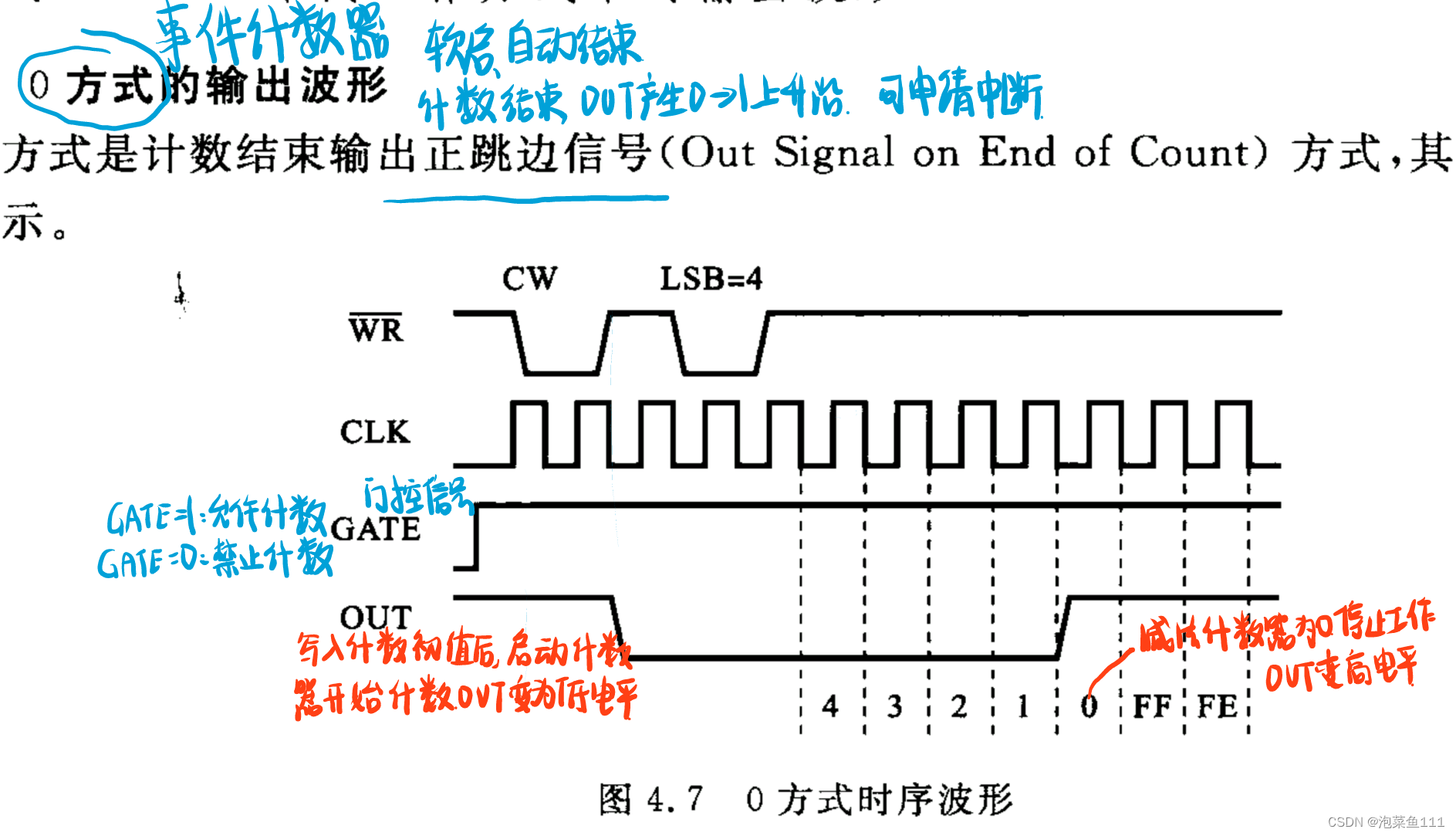
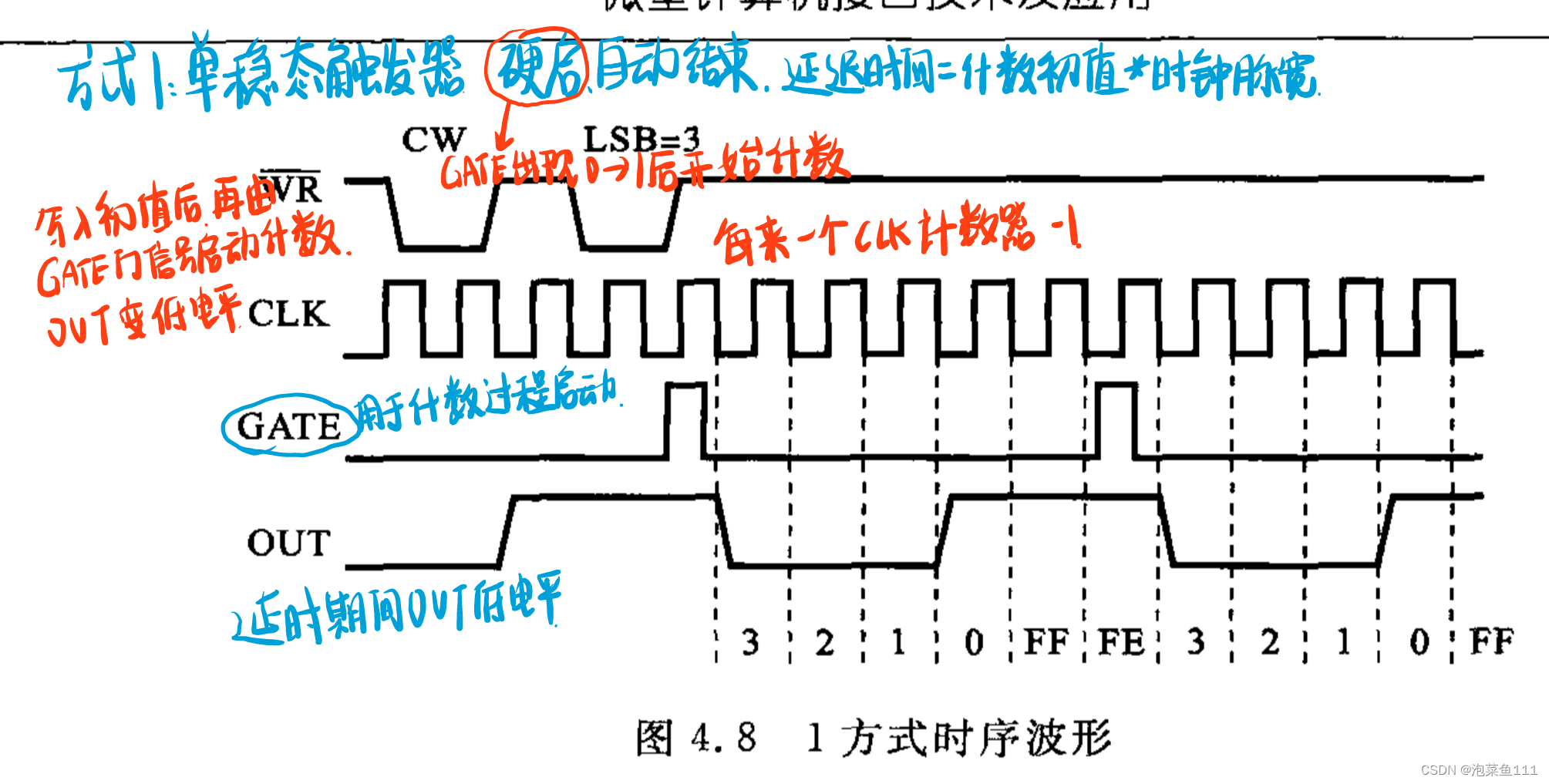
启动方式:软件启动(GATE=1时,当计数初值写入减法计数器就开始计数),硬件启动(计数初值写入减法计数器后,等GATE由0变为1的上升沿出现才开始计数)。
停止方式:强制停止方式(对于重复计数过程,因为能自动重装载,计数过程会反复进行,不能自动停止,要停止计数必须加控制信号,方法是置GATE=0),自动停止方式(对于单次计数过程,一到计数完毕就自动停止)。
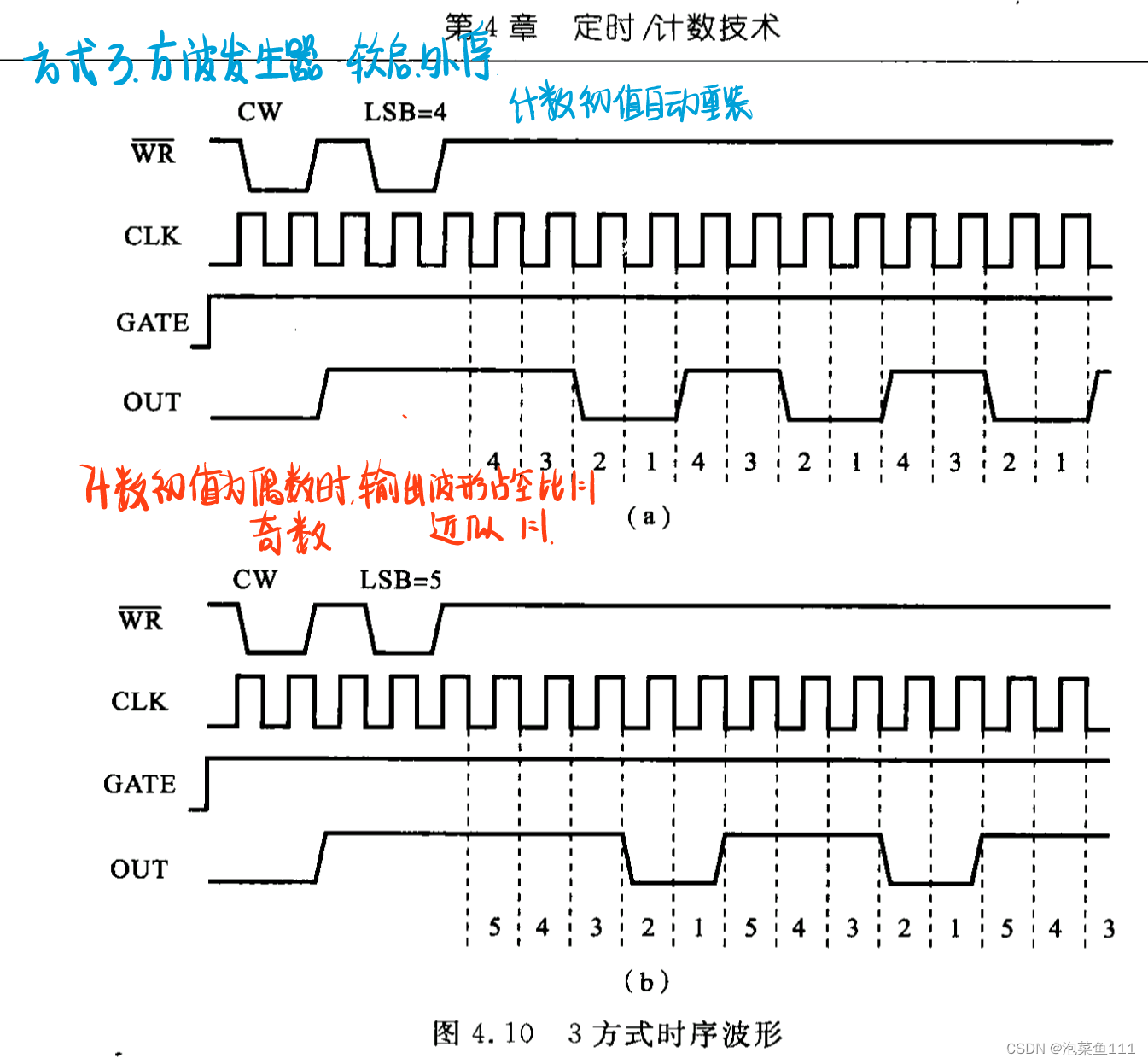
因为只有方式2和方式3有自动重装载功能,所以只有方式2和方式3能输出连续波形,其他方式只能输出单次波形。
方式0: 软启 自动结束
方式1:硬启 自动结束
 方式2:软启 不自动结束
方式2:软启 不自动结束

方式3:软启 不自动结束
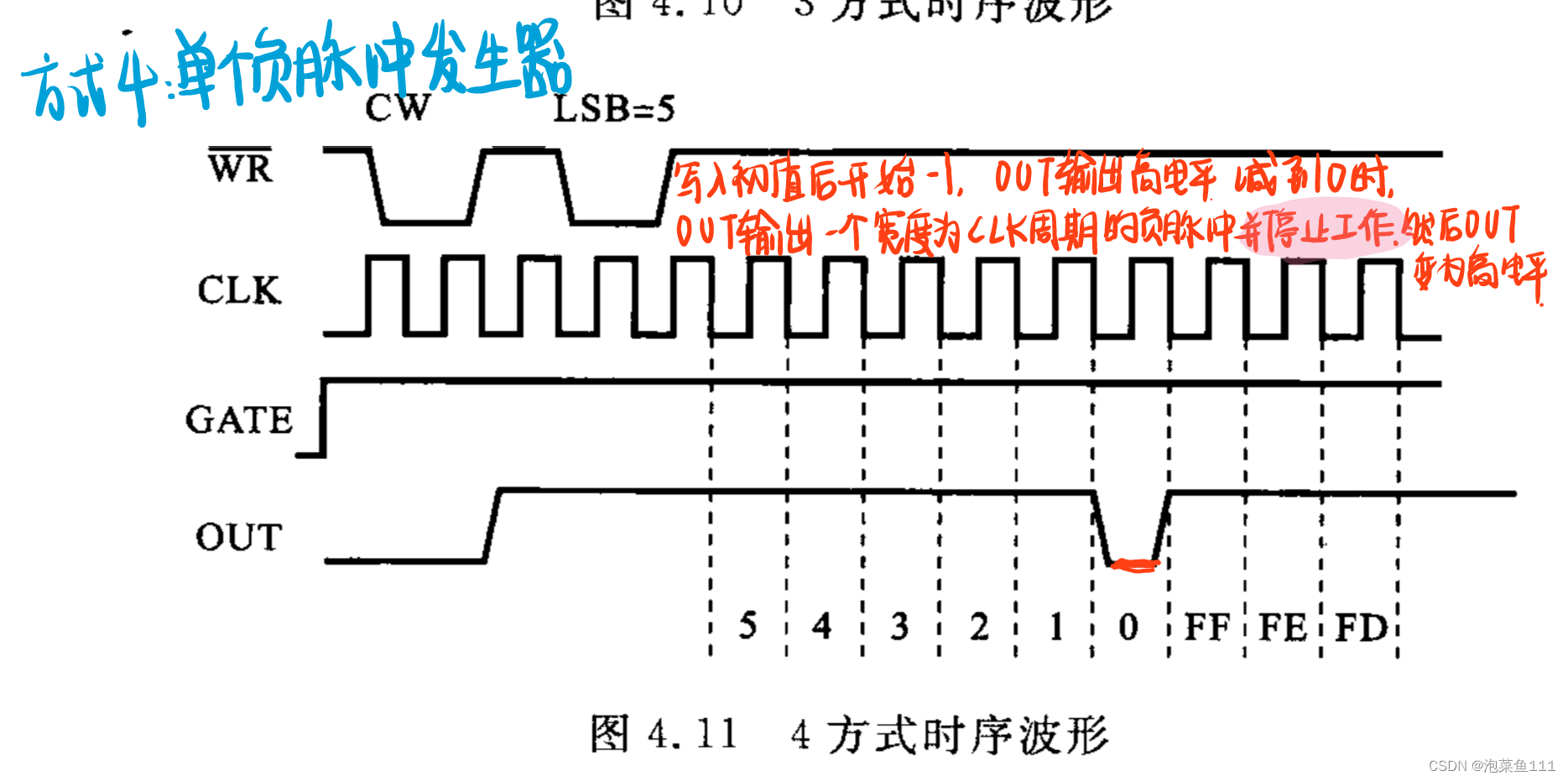
方式4:软启 自动结束
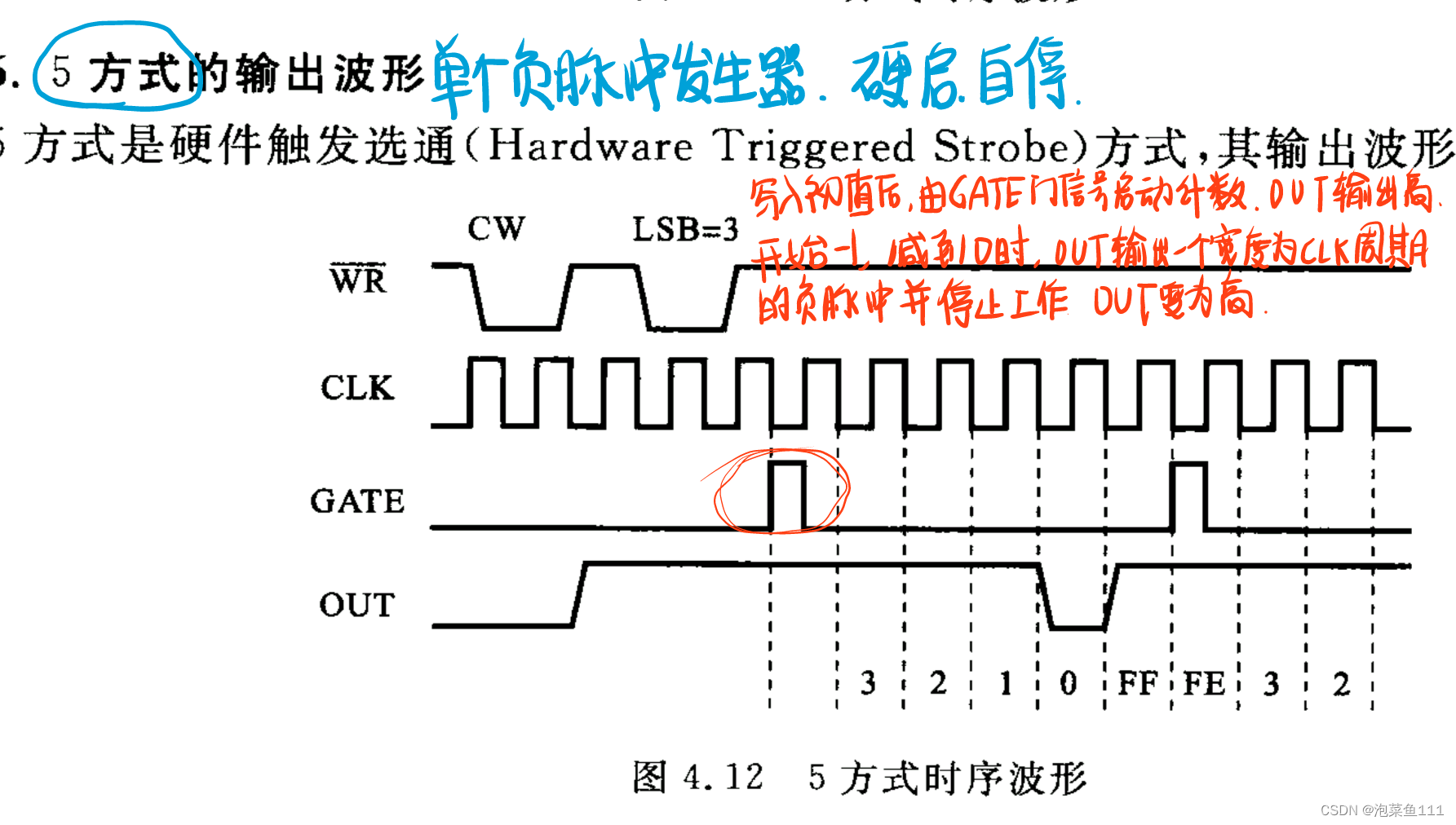
方式5:硬启 自动结束
计数初值的计算与装入
作计数器用:次数就是计数初值,直接装入就可,不用换算。
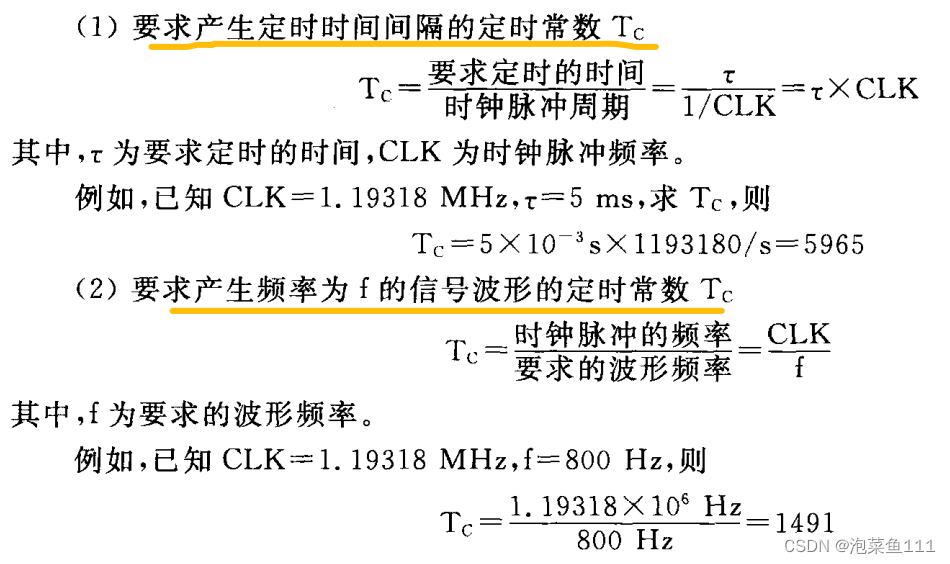
作定时器用:需要换算,换算方法:
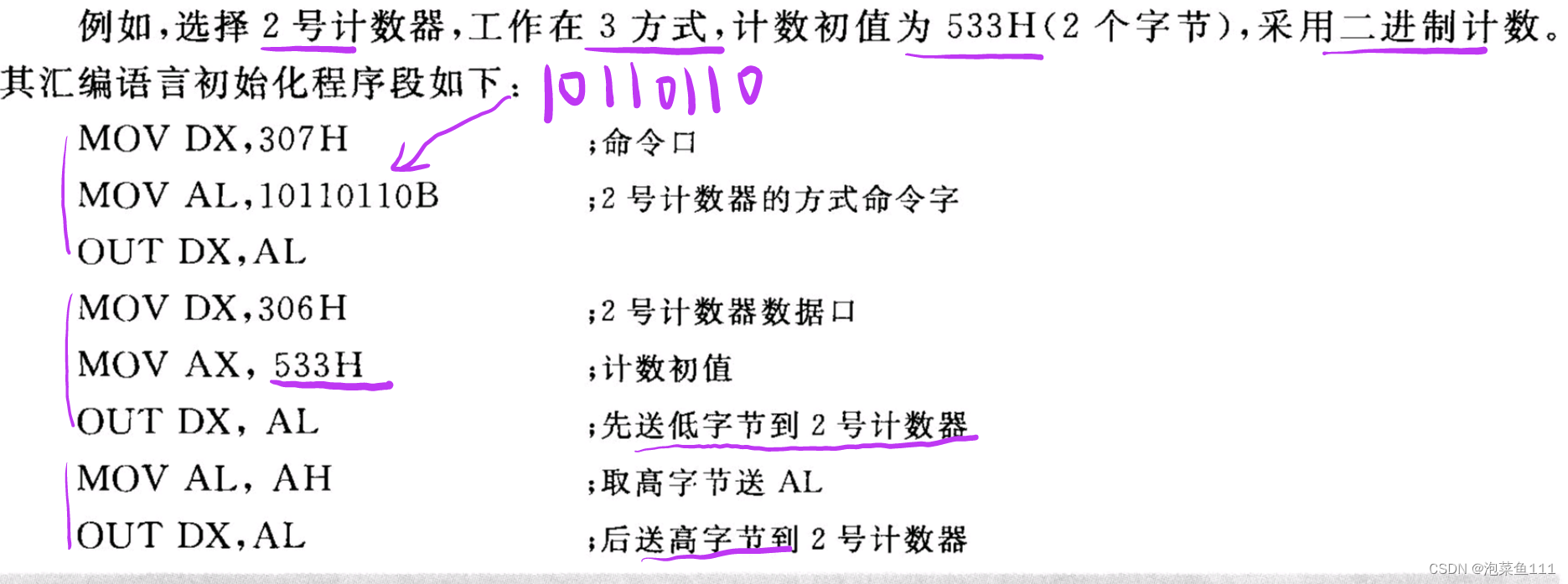
装入:16位减法计数器,8253外部数据线只有8位,所以先装低八位,后装高八位,写入同一个端口。
8253的初始化
这篇关于微机原理——定时器8253(8254)学习1的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




