本文主要是介绍突破界限:R200科研无人车,开辟研究新天地,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
提到科研无人车,大家可能首先想到的是其在自动驾驶和其他先进技术领域的应用。然而,随着科技的不断进步,科研无人车已经在智慧城市建设、商业服务、地质勘探、环境保护、农业技术革新、灾害应急和自动化服务等多个领域发挥着至关重要的作用。
在今年的早些时候,我们对旗舰产品R300科研无人车平台进行了全面的升级,以确保它在行业内保持领先地位。
R300不仅配备了高性能底盘,还基于开源机器人操作系统ROS和先进的自动导航系统Ardupilot。它集成了多种传感器,预装了各类案例demo,并配有详尽的使用教程,全方位地支持开发者快速开发和高效验证他们的算法。

为了更好地满足开发者的多元化需求,特别是在室内外非越野和小空间环境中,我们自豪地推出了全新R200科研无人车!
R200科研无人车不仅继承了R300的丰富功能,还提供了更高的性价比,是一款真正能够适应各种环境和需求的科研无人车。
R200科研无人车![]() https://mp.weixin.qq.com/s?__biz=MzIwNzgxNzg0Mg==&mid=2247548342&idx=1&sn=b20f81f1a0185e3563741408b5f0d0c5&chksm=970ee0aba07969bd4be3b0814fc44d165ba594b15a7756a037d411b056d5de7c3d6a5144e407&token=563629232&lang=zh_CN#rd
https://mp.weixin.qq.com/s?__biz=MzIwNzgxNzg0Mg==&mid=2247548342&idx=1&sn=b20f81f1a0185e3563741408b5f0d0c5&chksm=970ee0aba07969bd4be3b0814fc44d165ba594b15a7756a037d411b056d5de7c3d6a5144e407&token=563629232&lang=zh_CN#rd
R200 无人车主要功能
R200(EasyCar系列)是一款低成本的开源无人车科研平台,适用于室内外多种场景的自主导航避障、室内二维、三维建图、GAZEBO仿真、多目标点巡航与导航算法的验证。
航点规划
多目标点巡航

二维建图
三维建图
GAZEBO仿真
自主导航避障
R200与R300:专业定位与应用场景
R200

R300

R200无人车专为需要高度灵活性和精准操作的环境而设计。其轻巧的构造和高效的传感器使其特别适用于狭窄空间的操作,例如实验室、小型仓库和复杂的工厂环境。

应用场景
R200无人车适用于工业巡检、小型仓库管理、科研探测等多种场合。它的高灵活性和可靠性使其成为小型工厂、研究所和紧凑空间的理想选择。

工业巡检

自动驾驶

仓储物流

巡逻安防

测量勘探

农业耕种
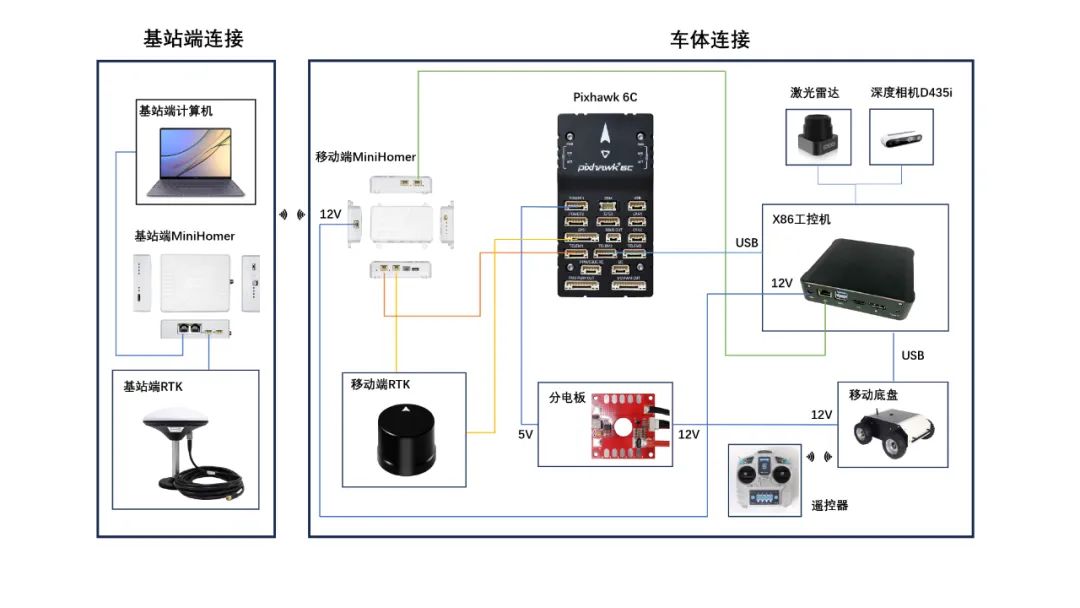
硬件连接图
发货清单
| 设备名称 | 规格/型号 | 单位/数量 | 基站版 |
|---|---|---|---|
| 整车 | 底盘+上装 | 1 套 | √ |
| 遥控器 | MC6C航模遥控器 | 1 个 | √ |
| 无线键鼠 | 无线键鼠套装 | 1 套 | √ |
| Mini Homer | 基站端 | 1套 | √ |
| RTK | F9P RTK 基站 | 1 套 | √ |
| 包装箱 | 定制 | 1 个 | √ |
这篇关于突破界限:R200科研无人车,开辟研究新天地的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!