本文主要是介绍无人机实践:DJI A3 飞控---使用,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
无人机实践:DJI A3 飞控---使用
- 指南针校准
- 校准注意事项
- 校准步骤
- 需要重新校准的情况
- 飞行模式
- 自动定位模式
- 姿态模式
- 功能模式
- 手动模式
- 飞行模式指示灯
- 飞行控制
- 手动起飞
- 姿态控制
- 手动降落
- 停止电机
- LED 飞行状态指示灯
- GPS-Compass Pro/IMU Pro/ 主控器工作状态指示灯
指南针校准
首次使用,必须进行指南针校准,否则系统可能无法正常工作,从而影响飞行安全。指南针容易受其它电子设备干扰,将导致数据异常影响飞行,甚至导致飞行事故。经常校准可以使指南针工作在最佳状态。
校准注意事项
- 请勿在强磁场区域或大块金属附近校准,如磁矿、停车场、带有地下钢筋的建筑区域等。
- 校准时请勿随身携带铁磁物质,如钥匙、手表等。
- 如果在室内校准了指南针,则更换到室外飞行时切记重新校准,防止两个区域因磁场差异而
导致飞行数据异常。 - 下可能有钢铁类的物质影响了指南针,请将飞行器移到其他的位置放置。
校准步骤
- 在遥控器模式切换开关的 P 档和 A 档之间来回所拨开关 3 次,飞行器状态指示灯黄灯常亮进入指南针校准状态。使用其它遥控器时,则是在开关档位 1 和档位 3 之间切换。
- 水平旋转飞行器 360°,飞行器状态指示灯绿灯常亮。
- 使飞行器机头朝下,水平旋转 360。
- 飞行器状态指示灯模式灯正常亮着,完成校准。若飞行器状态指示灯显示红灯闪烁,表示校准失败,需要重新校准指南针。
需要重新校准的情况
- 指南针数据异常,飞行器状态指示灯显示红黄灯交替闪烁
- 飞行场地与上一次指南针校准的场地相距较远
- 飞行器机械结构有变化
- 飞行时漂移比较严重,或者不能直线飞行
飞行模式
A3飞控有多种控制模式,使用不同控制模式,飞行器的飞行表现会有所不同,
自动定位模式
自动定位模式(P 模式)依据定位条件,在三种状态中自动切换:
P-GPS 状态: 飞行器利用 GPS 信号和视觉定位,可在任意飞行高度自动定位并可自动返航。
P-OPTI 状态:GPS 定位无效,视觉定位有效时,飞行器仅可在 3 米及以下高度自动定位,同时自动返航功能失效。
P-ATTI 状态:GPS 和视觉定位都无效,飞行器仅可保持平衡,无法自动定位并会发生漂移,同时自动返航功能失效。
姿态模式
姿态模式(A 模式):不使用 GPS 模块与视觉定位系统进行定位,仅提供姿态增稳,若 GPS卫星信号良好可实现返航。
功能模式
功能模式(F 模式):辅助功能模式,在这个模式下可以使用智能飞行模式。
手动模式
手动模式(M 模式):手动模式下,无 GPS 和视觉定位,也无姿态稳定,建议仅在紧急情况下使用。
飞行模式指示灯

飞行控制
手动起飞
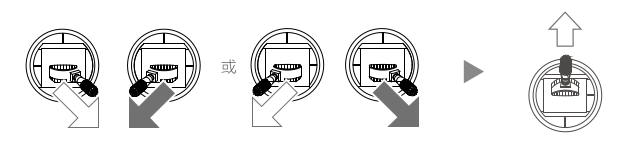
以下两种掰杆动作中的任何一种方式可用于启动电机。启动电机后横滚、俯仰和偏航杆立刻回中,同时向上推动油门杆使飞行器起飞。
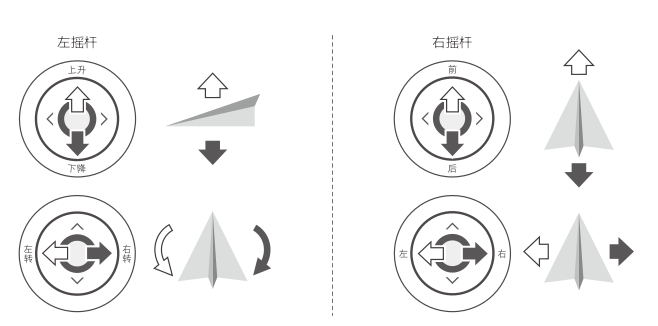
姿态控制
手动降落
使用以下方式停止电机转动:
飞行器着地之后,将油门杆推到最低的位置并保持,3 秒后电机停止。
停止电机
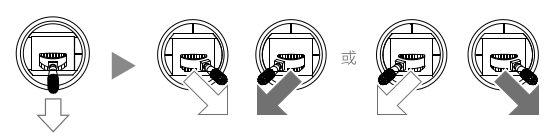
飞行器着地之后,先将油门杆推到最低位置①,然后执行掰杆动作②,电机将立即停止。停止
后松开摇杆。
LED 飞行状态指示灯

GPS-Compass Pro/IMU Pro/ 主控器工作状态指示灯

这篇关于无人机实践:DJI A3 飞控---使用的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





