本文主要是介绍java superess,凯迪拉克Super Cruise超级智能驾驶系统全面解析,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
在今日开幕的2018亚洲消费电子展上,凯迪拉克Super Cruise超级智能驾驶系统正式中国发布。凯迪拉克指出,超级智能驾驶系统是业内首个量产并可真正实现在高速公路上释放双手驾驶的智能驾驶技术。在国内,超级智能驾驶系统也将率先搭载于凯迪拉克旗舰车型CT6 40T铂金版上。

超级智能驾驶系统,拥有驾驶员注意力保持系统和高精地图数据系统两大核心技术,能够整合车道中央行驶保持系统和自适应巡航系统,辅以增强型GPS定位,并与原有强化安全策略ESS的实时摄像头与雷达传感器形成强大互补,使驾驶者在双手脱离方向盘之后仍能安全地完成一系列日常行驶操作。
凯迪拉克CT6首席工程师李林登(Lyndon Lie)先生表示:“‘安全’是超级智能驾驶系统研发过程的第一要义,我们深知提升驾驶员操控专注度的重要性。首次将驾驶员注意力保持系统整合其中,确保驾驶员时刻保持对驾驶的专注和车辆的掌控。”
驾驶员注意力保持系统由七大模块组成,涵盖监控、警示、交互三大功能。当超级智能驾驶系统运行时,通过位于车辆转向柱顶端的微型摄像头与方向盘灯带两旁的红外传感器,系统可实时追踪驾驶者头部位置和脸部特征,识别驾驶者的视线方向,确保其始终专注于驾驶。当驾驶者视线离开时间过久时,系统会提示驾驶者将注意力转移至前方道路,而如果驾驶者没能及时收回注意力,系统将进一步升级警示强度,利用方向盘光条、警示图标、座椅震动、蜂鸣音进行增强提示。如驾驶者仍未作出任何反应,系统则将通过驾驶辅助技术及时制动车辆,在必要的情况下OnStar安吉星紧急救援将主动联系驾驶员,全面保障驾驶者与车辆的安全。

与此同时,超级智能驾驶系统是全球第一个使用高精地图数据的智能驾驶技术。据了解,高精地图数据采用了针对未来自动驾驶车辆研发的先进技术——激光雷达扫描地图。增强型GPS定位所提供的实时方位数据准确性则是传统GPS的4-8倍。
Super Cruise超级智能驾驶系统能够高度整合包括高精地图数据、实时摄像头、雷达传感器和增强型GPS定位系统等多种数据,有效确保超级智能驾驶系统只在合适的道路条件下启动,并更准确识别车辆所在的位置,保证系统安全顺畅运行。目前,已针对中国境内绝大多数的高速公路、城市快速路,以及与高速公路相连的所有城市高架道路进行了地图数据核查与评估。同时,得益于OTA远程升级技术,高精地图数据能够定期实现云端更新,以满足高速公路快速扩张等道路多变的属性。在国内,地图数据方面,凯迪拉克选择与高德地图合作进行地图核查工作。

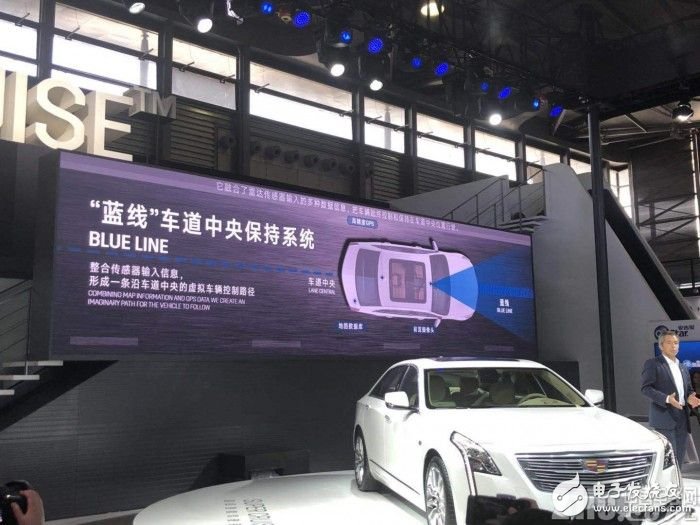
不仅如此,多种数据的高效结合,形成了一条被称为“蓝线”的虚拟车辆控制路径,以供车辆跟随并始终保持在车道中央位置行驶,这样能更好地提升车辆在曲度较复杂路况上,如曲折道路或山路弯道中的操控安全性。
同时,超级智能驾驶系统具备功能安全与网络安全双模块,从两个层面保证系统的安全性。不同于其他类似系统,超级智能驾驶系统拥有两个EOCM模块,实时进行互相备份,并在刹车系统、转向控制、驾驶员注意力监控等子系统,全面实现增强性冗余设计,以确保安全驾驶和行车安全。
这篇关于java superess,凯迪拉克Super Cruise超级智能驾驶系统全面解析的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




