本文主要是介绍ubuntu22.04 arrch64版操作系统编译zlmediakit,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
脚本
系统没有cmake,需要通过apt先进行下载,下面的脚本已经包含了
# 安装依赖 gcc-c++.x86_64 这个不加的话会有问题
sudo yum -y install gcc gcc-c++ libssl-dev libsdl-dev libavcodec-dev libavutil-dev ffmpeg git openssl-devel gcc-c++.x86_64 cmakemkdir -p /home/zenglg
cd /home/zenglg
git clone --depth 1 https://gitee.com/xia-chu/ZLMediaKit
cd ZLMediaKit
# 千万不要忘记执行这句命令
git submodule update --init
mkdir build
cd build
cmake ..
make -j4编译过程
编译好之后的程序路径
/home/zenglg/ZLMediaKit/release/linux/Debug
运行流媒体zlmediakit程序
输入命令
./Mediaserver
出现下图说明运行成功

推流测试
利用ffmpeg进行推流
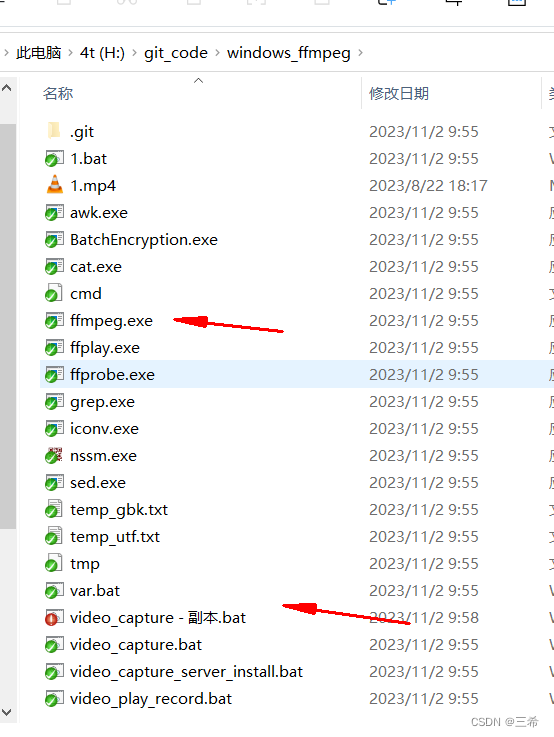
推流脚本bat代码如下
注意:需要将1. mp4文件放在ffmpeg.exe所在目录下 ,rtsp地址的ip为zlmediakit所在服务器的ip
@REM 获取视频采集设备
@REM "Integrated Webcam" (video)
@REM "麦克风 (Realtek(R) Audio)" (audio)@REM ffmpeg -f dshow -i video="Integrated Webcam" -f dshow -i audio="麦克风 (Realtek(R) Audio)" -vcodec libx264 -acodec mp3 1.mkv
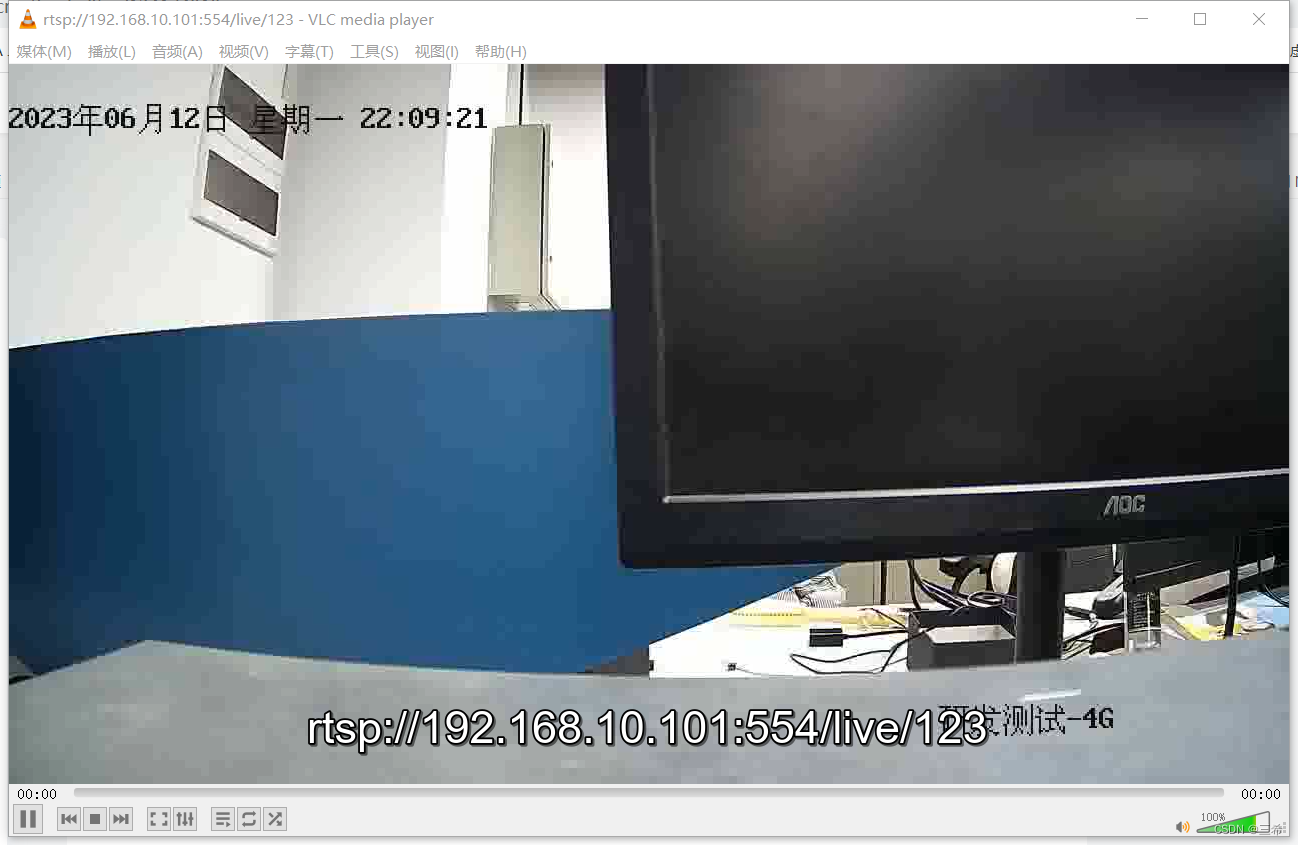
@REM ffmpeg -f dshow -i video="Integrated Webcam" -vcodec libx264 1.mkvffmpeg -re -stream_loop -1 -i 1.mp4 -f rtsp rtsp://192.168.10.101:554/live/123?secret=035c73f7-bb6b-4889-a715-d9eb2d1925cc下图说明正在推流

下图是用vlc打开rtsp地址去进行播放
这篇关于ubuntu22.04 arrch64版操作系统编译zlmediakit的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









