本文主要是介绍[工业自动化-16]:西门子S7-15xxx编程 - 软件编程 - 西门子仿真软件PLCSIM,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
前言:
一、PLCSIM仿真软件
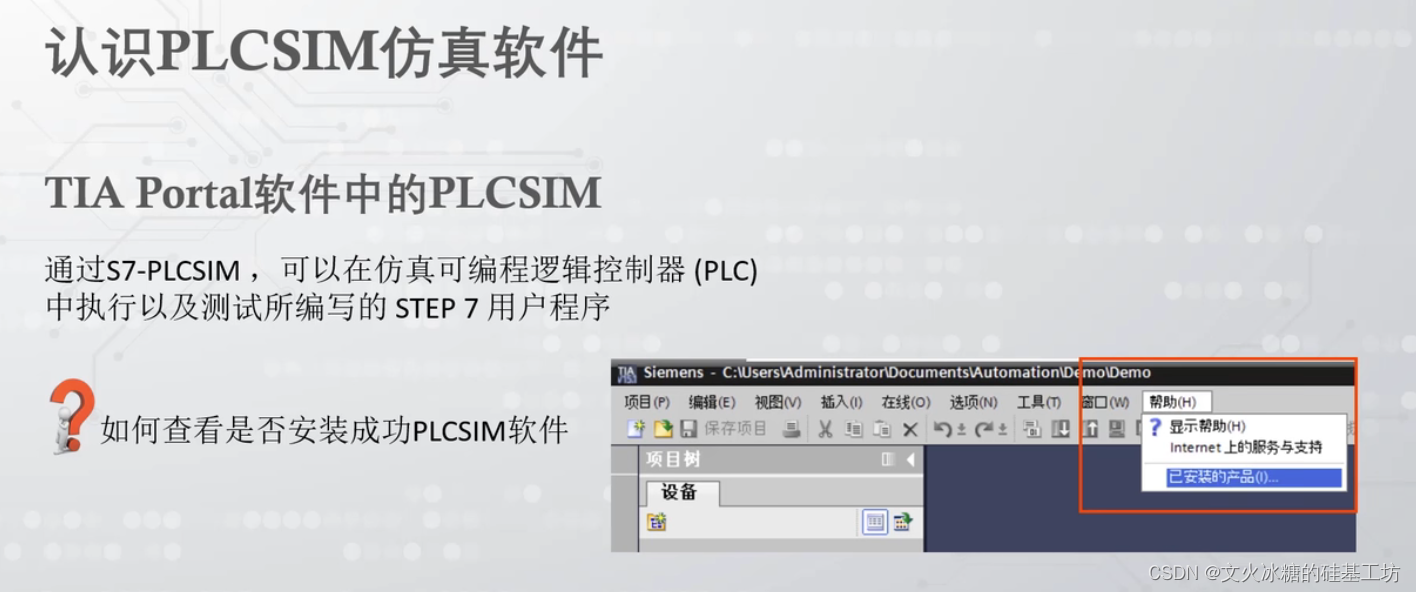
1.1 PLCSIM仿真软件基础版(内嵌)
1.2 PLCSIM仿真软件与PLCSIM仿真软件高级版的区别?
1.3 PLCSIM使用
前言:
PLC集成开发环境是运行在Host主机上,Host主机与PLC可以通过以太网与PLC嵌入式CPU系统进行连接。
PLCSIM仿真软件是PLC硬件的仿真环境,虽然PLCSIM与host主机开发软件安装在相同的Host主机上,为了尽可能贴近真实环境,Host主机开发软件与PLCSIM也需要通过IP地址通信。
一、PLCSIM仿真软件
1.1 PLCSIM仿真软件基础版(内嵌)

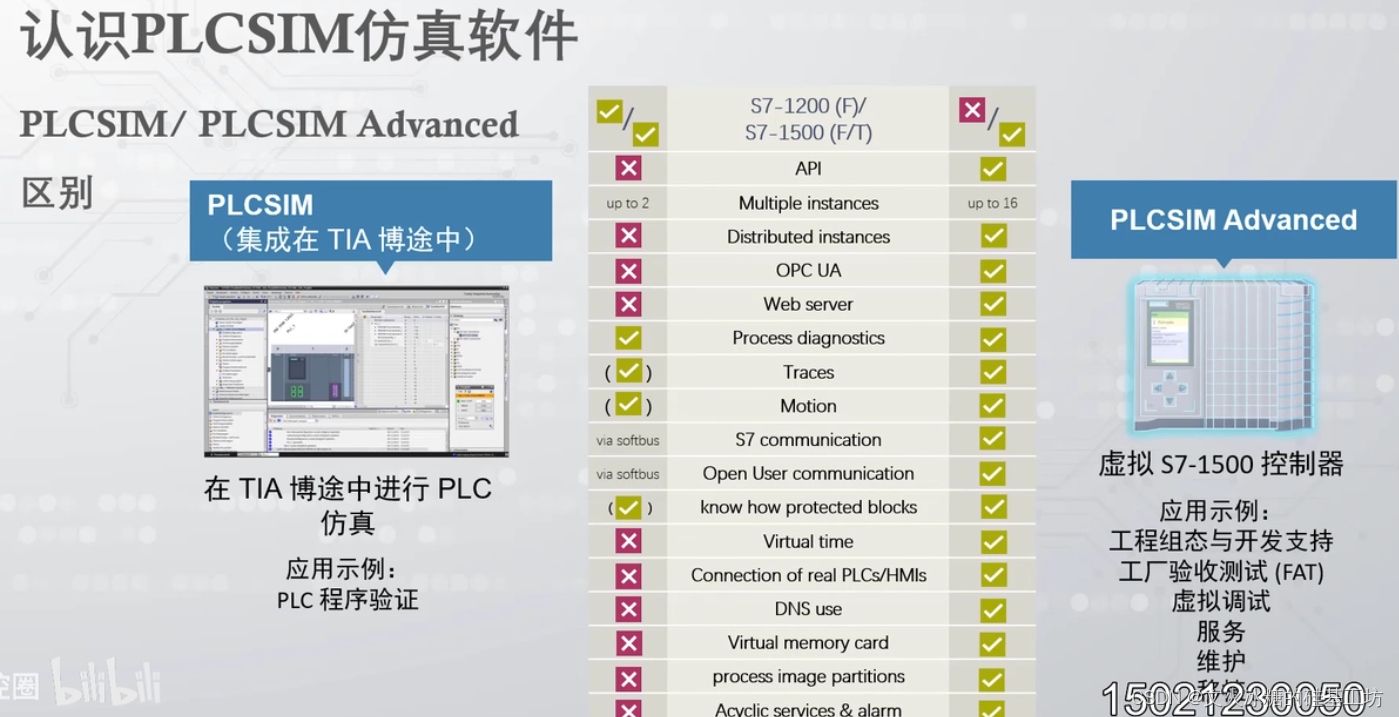
1.2 PLCSIM仿真软件与PLCSIM仿真软件高级版的区别?
PLCSIM仿真软件和PLCSIM仿真软件高级版都是由西门子公司开发的PLC仿真软件,但它们之间有以下的区别:
-
硬件支持:PLCSIM仿真软件支持模拟S7-300和S7-400 PLC,而PLCSIM仿真软件高级版则支持模拟更多的PLC型号,包括S7-1200、S7-1500、ET 200 SP等。
-
功能扩展:PLCSIM仿真软件高级版相较于基本版,在功能扩展方面更加全面,可以实现虚拟多CPU环境、控制器间的通信、数据共享等。
-
网络仿真:PLCSIM仿真软件高级版支持在局域网或者互联网上进行网络仿真,用户可以通过配置网络连接参数,在多机环境下共同进行PLC程序的开发、调试和测试。而PLCSIM仿真软件不支持此功能。
需要注意的是,PLCSIM仿真软件和PLCSIM仿真软件高级版都需要结合仿真工具使用,如TIA Portal或者STEP 7等,才能进行PLC程序的开发、仿真和调试等工作。选择哪个版本可以根据实际需要和预算做出合理的选择。
1.3 PLCSIM使用


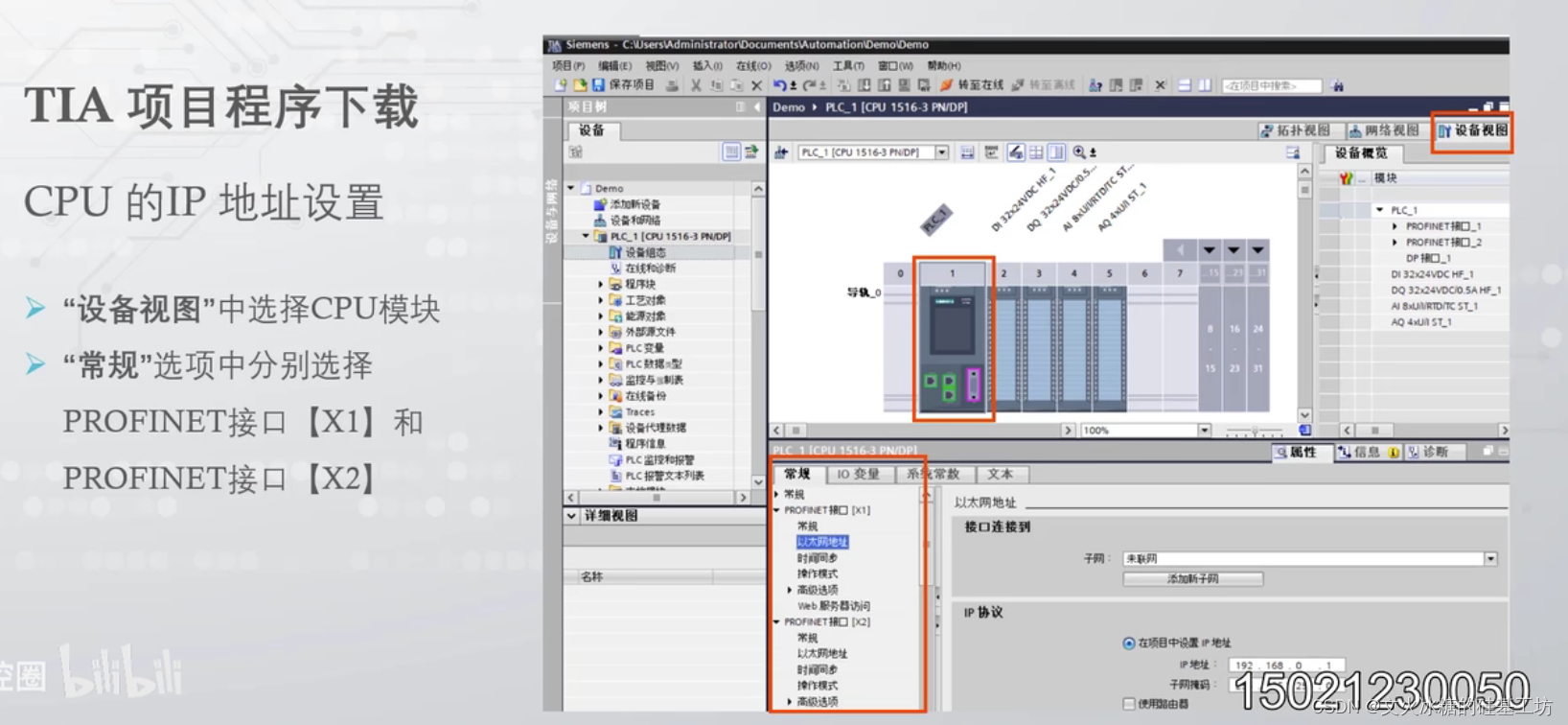

PLC的CPU IP地址是指PLC CPU在网络中的唯一标识,用于与其他设备(包括主机软件)进行通信。不同的PLC品牌和型号可能会有不同的设置方法和要求,以下是一般情况下设置PLC CPU IP地址的步骤:
-
连接到PLC:将计算机与PLC进行连接,可以使用以太网或者串口连接。确保连接稳定并能与PLC进行通信。
-
打开配置软件:打开相应的PLC配置软件,如TIA Portal、STEP 7等,连接到PLC。
-
导航到CPU配置:在软件中导航到对应PLC CPU的配置页面。具体步骤取决于使用的软件和PLC型号。
-
设置IP地址:在CPU配置页面中,找到网络设置或以太网配置选项。在这里,您可以设置IP地址、子网掩码、默认网关等网络参数。输入要为CPU分配的唯一IP地址,并保存设置。
-
应用和测试:应用所做的设置,并重新启动PLC。确保计算机与PLC处于同一子网,以便它们可以相互通信。
请注意,具体的步骤和方法可能因PLC品牌、型号和配置软件的不同而有所变化。在进行IP地址设置之前,建议参考PLC的相关文档和使用手册,以确保正确配置。
备注:
CPU不同的以太网口,有不同的IP地址。



这篇关于[工业自动化-16]:西门子S7-15xxx编程 - 软件编程 - 西门子仿真软件PLCSIM的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




