本文主要是介绍新手一个, 记录一次调节板球系统PID的辛酸历程,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
电赛将近, 我和小伙伴选择了板球系统作为练习题目。
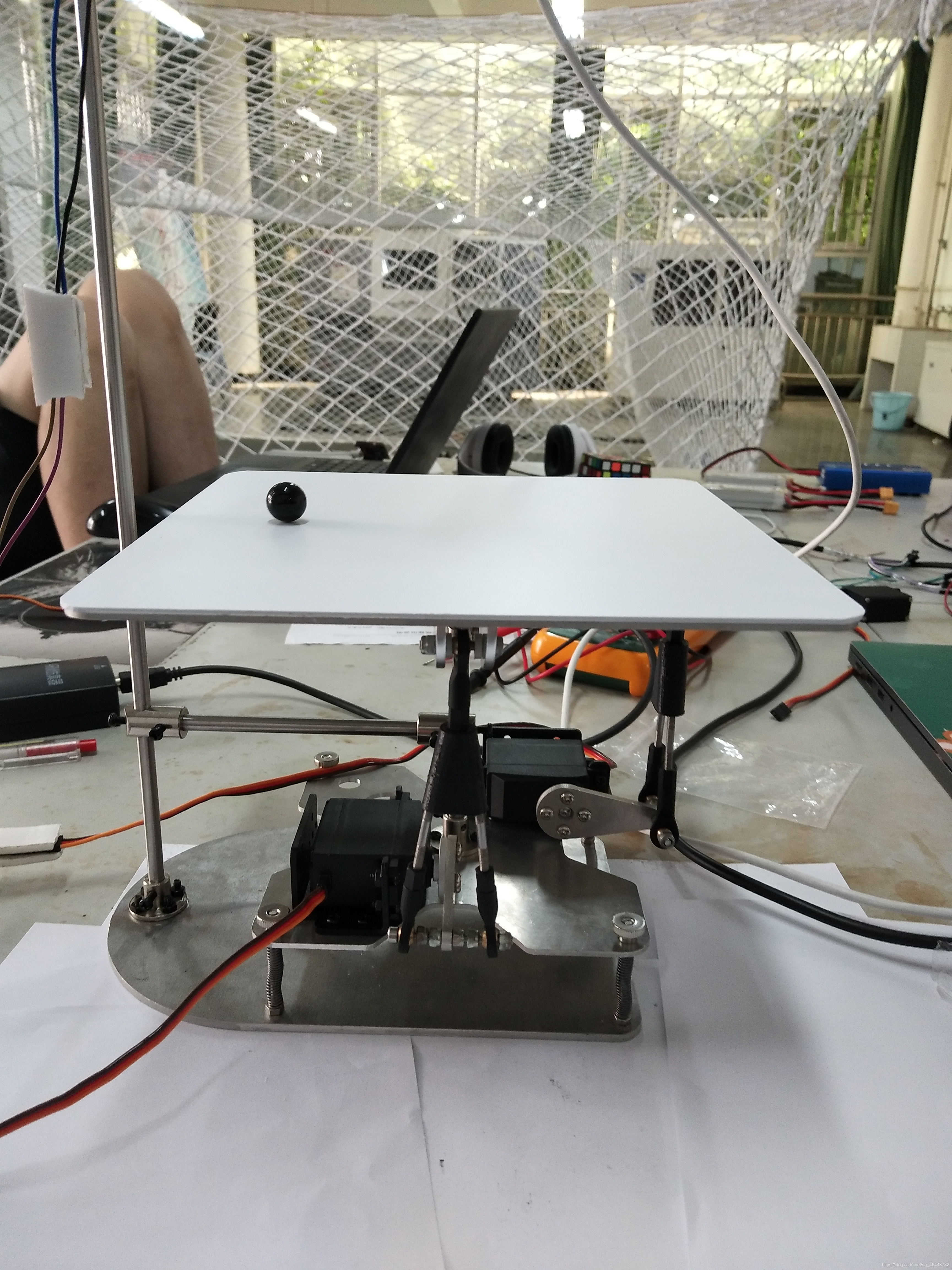
1、机械结构是淘宝上买的。主要器材有:2个舵机,1个白板,1个黑球,1个openmv3摄像头,1块STM32F103ZET6开发板,杜邦线若干。
2、系统工作过程: openmv3摄像头采集黑球在白板上具体坐标,通过usart3传给STM32主控板,主控板拿到坐标后进行PID解算。TIM4产生两路PWM波,解算后的返回值作为两个DS3119舵机的PWM输出值。控制函数写在定时器1的中断服务函数里,每17ms执行一次。
3、注意事项: 主控板采用外电源供电,openmv3摄像头采集小球坐标信息时受光照影响较大,可适当采取补光措施。板球系统对PID反馈闭环的收敛速度要求较高,需要耐心调节参数。
这篇关于新手一个, 记录一次调节板球系统PID的辛酸历程的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







