本文主要是介绍智能座舱架构与芯片- (5) 硬件篇 下,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
四、短距无线连接
随着汽车智能化的发展与新型电子电气架构的演进,传统车内有线通信技术存在着诸多痛点:
- 线束长度增加:由于智能化与自动化的发展,车内传感器和执行器均大幅增加。采用有线技术连接,则线束长度,重量,成本会带来更大影响;
- 线束安装困难:线束安装强依赖于人工,线束安装的成本占人工成本的50%;基于有线连接的车载部件难以灵活升级,更增加了后期的维护与升级成本;
- 接插件数量多:由于线束连接,导致车内接插件数量显著增加。由于车内电磁干扰等影响,一定场景下有接插件失效的危险;
因此,为了满足车辆生产制造过程中的成本控制,灵活部署,降低重量等需求,并且在座舱娱乐系统中方便用户体验,以车内短距无线连接代替部分有线连接,完成数据传输和控制功能成为发展重点。当前,电池管理系统,车载信息娱乐系统,无钥匙进入,胎压监测等车载应用出现了无线化的需求。车载应用功能对短距无线通信技术提出了“低时延,高可靠,精同步,高并发,高安全,低功耗”的要求。
下面将介绍用于智能座舱的车内短距无线通信技术,而用于车云一体化和车联网的5G+V2X通信模块则暂不涉及。
4.1 Wi-Fi
Wi-Fi是IEEE 发布的802.11协议家族,其发展历程和技术原理纷繁复杂,在此不多做介绍。目前在车内座舱环境中,为了引入对用户设备无线连接的支持,以及车机手机互联的需要,智能座舱域控制器中需要增加Wi-Fi模块的支持。
802.11协议发展历程


Wi-Fi 带宽计算:
整机速率 = 空间流数量 * 1/(Symbol+GI) * 编码方式 * 码率 * 有效子载波数量
- 空间流数量
空间流,即Wi-Fi AP与Station之间建立的空间数据流。2*2代表有2条数据流。8*8就代表有8条空间数据流。对于发送方来说,有几条空间流,就需要有几根天线。
- Symbol与GI
Symbol就是时域上的传输信号,相邻的两个Symbol之间需要有一定的空隙(GI),以避免Symbol之间的干扰。不同Wi-Fi标准下的间隙也有不同,一般来说传输速率较快时GI需要适当增大。
- 编码方式 (bit数/Symbol)
编码方式就是调制技术,即1个Symbol里面能承载的bit数量。从Wi-Fi 1到Wi-Fi 6,每次调制技术的提升,都能至少给每条空间流速率带来20%以上的提升。
- 码率
理论上应该是按照编码方式无损传输,但现实没有这么美好。传输时需要加入一些用于纠错的信息码,用冗余换取高可靠度。码率就是排除纠错码之后实际真实传输的数据码占理论值的比例。
- 有效子载波数量
载波类似于频域上的Symbol,一个子载波承载一个Symbol,不同调制方式及不同频宽下的子载波数量不一样。
下表给出了Wi-Fi的速率计算表格:

对于Wi-Fi6 8*8的配置来说,最大可支持空间8流,因此802.11ax在8*8的条件下,最大带宽为 1.2Gbps * 8 = 9.6Gbps;
注意,如果AP和手机建立连接,而手机只支持2*2,那么单个手机与AP的连接也只有2流,其最大速率只有2.4Gbps;有些Wi-Fi 模组支持双频并发(DBS with dual mac),此时代表在2.4GHz 和 5G Hz两个频段上并发传输,速率标记为2*2+2*2,实际最高带宽可接近3Gbps。
4.2 BT
蓝牙 (BlueTooth) 技术是一种无线数据与语音通信的开放性全球规范,它以低成本的近距离无线连接为基础,为固定设备或移动设备之间的通信环境建立通用的无线电空中接口(Radio Air Interface),将通信技术与计算机技术进一步结合起来,使各种3C设备在没有电线或电缆相互连接的情况下,能在近距离范围内实现相互通信或操作。简单的说,蓝牙技术是一种利用低功率无线电在各种3C设备间彼此传输数据的技术。蓝牙工作在全球通用的2.4GHz ISM(即工业、科学、医学)频段,使用IEEE802.15协议。
蓝牙规范可分为两个层次:
- Core Specification(核心规范):用于规定蓝牙设备必须实现的通用功能和协议层次。它由软件和硬件模块组成,两个模块之间的信息和数据通过主机控制接口(HCI)的解释才能进行传递。 这个是必选。
- Profiles(蓝牙应用规范):它从应用场景的角度为蓝牙技术的使用制定了不同的规范。这也是和大众日常生活接触最多的一部分。蓝牙支持很多Profiles,它是可选的。
Core Specification 包含2种技术:BR和LE,这两种技术,都包括了搜索,管理,连接等机制,但它们之间是独立发展的,因此BT设备最好能同时支持BR和LE,这样在设备进行互联时,可以根据实际需要,确保最大的兼容
1.Basic Rate (BR)
BR也称为经典蓝牙技术,它包括可选(optional)的EDR(Enhanced Data Rate)技术,以及交替使用的(Alternate)的MAC层和PHY层扩展(简称AMP)。对于EDR来说,最高传输速率可以达到2.1Mbps;对于AMP来说,它借用了Wi-Fi的PHY层和MAC层,因此最高速率可以达到54Mbps。由于EDR采用的是BT自身的PHY层,而AMP采用的是Wi-Fi的MAC与PHY,因此EDR和AMP是需要交替使用的(Alternate mode)。简单的说就是两个BT设备先在EDR上完成了点对点的连接,然后再协商是否都迁移到AMP上去,以实现更高的传输速率。
2.Low Energy (LE)
LE的重点是低功耗。它主要通过几个低功耗组件来实现蓝牙设备的发现,管理,连接等功能。
- GATT:表示服务器属性和客户端属性,描述了属性服务器中使用的服务层次,特点和属性。BLE设备使用它作为蓝牙低功耗应用规范的服务发现。
- ATT:实现了属性客户端和服务器之间的点对点协议。ATT客户端给ATT服务器发送请求命令,ATT服务器端向ATT客户端发送回复和通知。
- SMP:用于生成对等协议的加密密钥和身份密钥。SMP管理加密密钥和身份密钥的存储,它通过生成和解析设备的地址来识别蓝牙设备。
- L2CAP:管理连接间隔,例如10ms同步一次。它对LL进行一次简单封装,LL只关心数据本身,L2CAP就要区分是加密通道还是普通通道,同时还对连接间隔进行管理。
蓝牙常用的一些Profile:
1.A2DP:
全称为 Advances Audio Distribution Profile ,高质量音频分发规范,定义了如何将立体声(Stereo)质量的音频通过流媒体的方式从媒体源传输到接收器上,A2DP使用Asynchronous Connectionless Link(ACL,蓝牙异步传输)信道传输高质量音频内容,它依赖于Generic Audio/Video Distribution Profile(GAVDP,通用音频/视频分发规范)。A2DP必须支持低复杂度及Sub-bandCodec(SBC,低带宽编解码)。A2DP有两种应用场景分别是播放和录音。
- 播放场景是具有蓝牙功能的播放器通过A2DP向蓝牙耳机或蓝牙立体声扬声器传送高质量音频。
- 录音场景是具有蓝牙功能的麦克风通过A2DP向蓝牙录音器传送高质量音频。
2.AVRCP(Audio/Vedio Remote control profile)
音视频远程控制规范,它可以控制音视频流的协议,进行暂停,播放,停止,音量控制等。AVRCP协议定义了2个角色:
- Target:被控制的目标设备,接收命令并按命令响应,例如电视,手机等;
- Controller:远程控制端设备,发送控制命令到Target端,例如遥控器等;
3. HFP (Hands-Free Profile)
免提通话规范。定义了蓝牙音频网关设备如何通过蓝牙免提设备拨打和接听电话。HFP包括两个角色:Audio Gateway(AG,音频网关)和Hands-Free Unit(HF,免提设备)。
- AG 是音频输入和输出的设备,典型的AG设备是手机。
- HF是执行音频网关的远程音频输入输出设备,如耳机或者车载音响系统。
- 和HFP相关的规范有Headset Profile(HSP,耳机规范),Phonebook Access Profile(PBAP,电话簿访问规范)。
蓝牙的发展历程

4.3 UWB
UWB(Ultra Wide Band, 超宽带)技术是一种使用1GHz以上频率带宽的无线载波通信技术。它不采用正弦载波,而是利用纳秒级的非正弦波窄脉冲传输数据,因此其所占的频谱范围很大,尽管使用无线通信,但其数据传输速率可以达到几百兆比特每秒以上。使用UWB技术可在非常宽的带宽上传输信号,美国联邦通信委员会(FCC)对UWB技术的规定为:在3.1~10.6GHz频段中占用500MHz以上的带宽。
UWB的特点很多,其中一个特点是定位精确。
“冲激脉冲具有很高的定位精度。采用UWB技术,很容易将定位与通信合一,而常规无线电难以做到这一点。UWB技术具有极强的穿透能力,可在室内和地下进行精确定位,而GPS(全球定位系统)只能工作在GPS定位卫星的可视范围之内。与GPS提供绝对地理位置不同,超宽带无线电定位器可以给出相对位置,其定位精度可达厘米级,此外,超宽带无线电定位器在价格上更为便宜。”

在智能座舱上,目前UWB有3个应用方向:
1.无钥匙进入系统

2. 汽车迎宾系统
由于UWB具有定位精确的特性,因此可以在较远的地方就能感知到携带UWB钥匙的乘客靠近。此时可以启动相对应的迎宾系统,给用户以更佳的体验感受。
3. 车内儿童检测
欧洲NCAP计划从2023年1月起增加对车内儿童存在检测的评分,各项规定非常细致。美国正在立法要求所有新车预装儿童存在检测功能,预计在2025年全面实施。据说国内相关规范也在评估制订中。
“将儿童单独留在停放的车内,即使只有几分钟,也可能导致中暑和死亡,尤其是当汽车暴露在阳光下时。儿童无法自行下车,再加上对高温的耐受性较低,因此要求儿童不得留在车内无人看管。温度可以在短短15分钟内达到临界水平,让窗户半开着几乎不能减少威胁。与车祸相比,儿童死于车辆相关中暑的情况较少发生,但这些完全可以避免的死亡的性质值得特别关注,因为解决车内儿童体温过高问题的技术已经存在。”以上文字来自欧洲NCAP关于儿童存在检测的测试与评估标准的直接翻译。
用于车内儿童检测的技术,直接传感器方式有摄像头,毫米波雷达,UWB雷达等几种方式。

UWB雷达发射UWB脉冲信号,并接收该脉冲信号经障碍物反射后的回波,通过对回波扰动的分析来判断UWB雷达附近是否存在物体(或人)。具体来讲,UWB雷达通过接收到的CIR(Channel Impulse Response信道脉冲响应)来探测周围物体及其运动。可以通过它来检测儿童的呼吸,心跳等。
相比摄像头,UWB雷达没有隐私风险,可以穿透毯子,后向安全座椅等。相比毫米波雷达,它的成本相对较低,且没有无线电合规的风险。
根据2021年11月我国工信部颁布的《汽车雷达无线电管理暂行规定》:24G毫米波雷达已经禁止在新车上使用;77G毫米波雷达主要用于自适应巡航、防撞、盲点探测等应用;60G毫米波虽是目前舱内雷达使用的主要频段,但工信部本次规定尚未包含对60GHz频段的说明。
4.4 星闪SparkLink
星闪无线短距通信技术SparkLink,主要由星闪联盟制定和发布。针对包括汽车领域在内的关键应用场景及其需求,定义了从接入层到基础应用层的端到端标准体系。
星闪技术提供SLB(SparkLink Basic,星闪基础接入技术)和SLE(Sparklink Low Energy,星闪低功耗接入技术)两种无线通信接口。
一方面,SLB支持20s的单向时延、99.999%的传输可靠性和1s的同步精度,主要用于承载以车载主动降噪、无线投屏、工业机械运动控制等为代表的业务场景,其显著特征是低时延、高可靠、精同步和高并发等。

另一方面,SLE支持250s的双向交互、低至-110dBm的接收机灵敏度和多达256个用户的并发接入,主要用于承载包括耳机音频传输、无线电池管理系统、工业数据采集在内的具备低功耗要求的业务场景。

在汽车领域,星闪技术的主要应用场景有:
- 车载主动降噪
- 无钥匙进入
- 车载免提通话
- 车机手机互联
- 无线电池管理系统
- 营运车辆全景环视
- 无线氛围灯
五、存储子系统
随着车内新应用赋能,比如智能座舱可以将电商购物平台接入车内,还可以为后排乘客提供更丰富的视听娱乐节目,同时还要做好EDR这一类驾驶突发事件记录仪的日志记录,并处理各路传感器的采样输入信息,还要为驾乘人员提供合理的建议辅助作出决策,这一切不断升级进化的智能系统对车载存储需求要求扩大到数十GB的范围。据Counterpoint的研究表明,L3级自动驾驶汽车,单小时传感器生成的数据在TB级别。在未来十年内,乘用车单车存储容量将达到2TB。
智能座舱的存储子系统,根据需求,可以采用SD card,eMMC,UFS,SSD等方式。
5.1 车载存储器的演进过程
- 早期的GPS导航仪、行车记录仪等车载设备配备的基本都是SD卡,一般的SD卡只有4比特的总线宽度,可以提供最快100MBps的读写带宽,最大到上百GB的容量,可以提供简单的写保护功能。其缺点是显而易见的,由于依靠的仅是SD的金手指和卡槽内的金属触点连接,无法长时间可靠地适应汽车内颠簸、高温、高湿的变化环境。
- 后面出现了eMMC器件,这里的e代表的就是Embedded,虽然叫嵌入式MMC卡,其实它的外形结构是一块153引脚的BGA封装芯片。将其焊接在PCB板上,具有更好的稳定性,而且e.MMC卡具有8比特的总线宽度,可以提供最快400MB/S的读取速度,最高容量可达512GB,包括了内部带电源保护和温度超标管理,并且可以快速响应嵌入式系统的启动要求。
- 除了eMMC器件,在一些汽车上开始采用UFS(Universal Flash Storage,通用闪存存储器)存储芯片,其外形和eMMC几乎一模一样,也是BGA的封装芯片形式,它可以提供两对插分信号总线来高速传输数据,目前UFS 2.1的协议已经可以最快支持到1.2GB的读出速率,UFS 3.1的版本协议更是在2.1协议基础上翻了一倍,达到了2.9GB每秒,今后UFS 4.0版本协议更是达到了惊人的4.6GB每秒的吞吐率,而且单芯片能提供最高容量可以达到1TB容量。
- 除此之外,各大存储厂商也在积极研发基于PCIe接口的NVMe协议车规级SSD,将提供大于10GB每秒的数据吞吐率,而且包含前面eMMC、UFS的快速响应和温度管理特性,可以为下一代基于自动驾驶的智能车载系统提供几十TB的海量存储容量。
5.2 存储器的生命周期
由于车内严苛的使用环境,车载存储器除了从接口类型、读写速度,及存储容量几个维度外,还需要从其他维度来评估存储器的品质。比如从性能、可靠性、温度范围和增强特性等四个方面来衡量车载存储器的品质。首先要制造商具备多年的闪存研发经验积累,才能保证产品在满足高性能条件下同时具备可靠的品质保障。其次满足车用电子元件的AEC-Q100和国际标准。三是要能适应负40度到正85度的宽温和负40度到正105度的超宽温的工作环境、工作温度要求。四是要具备温度管理、快速启动、智能分区,满足汽车生产条件的100%存储空间的数据预烧录要求。
对于车载存储器来说,其生命周期的长短,除了受车载环境的影响,还与应用场景,以及Host端的读写操作特性有关。例如,一个长期、反复读写存储器的操作环境,必然加速存储器内部颗粒的磨损,从而变相减少它的生命周期。
无论是SD card,eMMC,UFS,SSD固态硬盘,其内部的存储颗粒都是NAND flash,用户数据写入NAND flash内部的cell中。不同类型的NAND,每个cell可以存储的数据容量不同。例如SLC NAND,每个cell可以保存1bit的数据;MLC可以保存2bit,TLC可以保存3bit。如下图所示:

图片来源:Kioxia
在向NAND cell中写数据时,首先要执行erase操作。也就是通过给cell的每一位写"1"的操作,将NAND cell初始化。这个过程被称为一次P/E cycle(Program/Erase)。每次P/E都会导致cell 单元的氧化层发生轻微退化(degrade ever so slightly),当达到一定的P/E次数后,cell单元将不再能够保存电荷,从而使用寿命终结。在上述3种类型的NAND中,SLC可以支持的P/E 次数最多,MLC次之,而TLC最弱。
为了保存数据,NAND还必须为cell维持一定的电压,以保持电荷。NAND controller firmware软件需要周期性地给NAND cell进行刷新,这样才能保证读取数据的正确性。然而,电荷将随着时间自然退化,并且电荷损失率可能会因极端温度变化和NAND cell 的健康而加速退化。
影响 NAND 单元寿命的因素有:
- 极端温度变化:
恶劣的车载环境会对存储器件的寿命造成影响,极热或极寒都会对车载电子设备造成巨大的挑战,根据车规AEC-Q100 grade3 的要求,车载电子设备的工作温度要满足从-40度到+105度。低温对存储器的影响还不太大,但是高温环境将使得NAND的数据保持能力大大降低。如下图所示,P/E cycles 的次数越多,NAND的数据保持能力降低越快。相同条件下,温度越高,NAND的寿命就越低。

- Flash存储磨损:
在向NAND写入数据之前,首先要执行P/E操作。P/E 操作将以Block为单位,向NAND cell写入“1”,称为erase。当重复进行erase后,电子氧化层将逐渐退化,在读取NAND cell中所保存的数据时就有可能会出错。虽然一些小量错误可以通过ECC错误校验码进行恢复,但当错误大量发生时,ECC也不可能将之完全恢复。这就会导致读数据错误,或者erase 失败。每一个NAND 都会有一个最大可支持的P/E cycles数目,当NAND block的P/E cycles超过这个数目时,它就不再可用了。衡量磨损加速的一个重要考量因素就是写放大系数WAF (Write Amplification Factor)
- 写放大系数WAF:
理想状态下,当Host端向NAND 端写入一个Byte的数据时,NAND controller应该只向NAND cell中写入1个Byte。但是由于NAND的特性(按块block擦除,按页page写入),因此很快就会造成NAND的碎片化。此时NAND controller为了进行写负载均衡,将会在闲暇时间执行garbage collection操作。garbage collection会造成数据在NAND内部的搬运,因此实际写入NAND cell的数据将远远大于主机端写入NAND的数据。我们使用写放大系数来衡量这一参数:

为了降低WAF,提升NAND的使用寿命,一些良好的使用NAND习惯有:
- 仔细评估WAF:应该收集并分析工作负载的trace信息,并计算WAF。然后使用这些数据作为系统性能改进的参考依据。
- 创建大的读写trunk:大量而频繁的小容量读写操作将会大大增加WAF。由于NAND的特性,它的读和写是以page为单位,擦除是以block为单位。因此在日常使用NAND的时候,应该在软件端尽量创建足够的buffer再进行NAND的读写操作。例如常用的log机制,最好是创建RAM buffer进行缓冲。
- 使用pSLC mode:对于那些需要小量写入的关键数据,可以将MLC或者TLC合并,作为一个伪SLC单元来写入。此时一个伪SLC单元只能存储1bit的数据,但它可以达到SLC的P/E cycles。这样操作所付出的代价是,2倍的MLC或者3倍的TLC,才能组合成一个pseUdo SLC单元。
- 使用负载均衡算法:这是对NAND controller厂商的要求。它们需要监控NAND 单元的使用情况,挑选出"at risk"的NAND block,并将它们的数据迁移到仍然具有良好性能的NAND block中。
- 监控NAND health registers:NAND 厂商(eMMC or UFS)都会提供与NAND health有关的实时报告,它是通过监控相关的寄存器而给出的。主机厂开发端通过监控这些健康报告,就可以得知当前的NAND寿命状态,并且可以分析出哪些读写NAND的操作是有风险的,这样就可以有针对性的去改进。

5.3 UFS
随着技术的发展,智能座舱的存储器逐渐从eMMC向UFS演化。


对于UFS来说,其内部存储单元还是NAND,它与eMMC的区别主要在于接口。从这幅图可以看出,UFS使用了MIPI联盟定义的M-Phy,而M-Phy又来源于UniPro协议。正是因为使用了串行化的传输方式,UFS才能够再一次地提升读写速率。

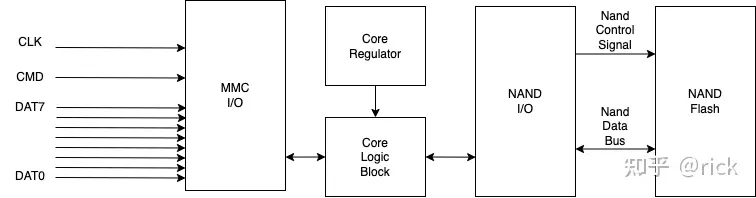
- UFS系统框图

- EMMC系统框图
未完待续...
这篇关于智能座舱架构与芯片- (5) 硬件篇 下的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!