本文主要是介绍福州大学《嵌入式系统综合设计》实验四:边缘检测,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、实验目的
BMCV 提供了一套基于 Sophon AI 芯片优化的机器视觉库,通过利用芯片的 TPU 和 VPP模块,可以完成色彩空间转换、尺度变换、仿射变换、透射变换、线性变换、画框、JPEG 编解码、BASE64 编解码、NMS、排序、特征匹配等操作。
本实验的目的是掌握算能的BMCV接口使用方法,掌握bmcv_sobel,bmcv_canny边缘检测函数的使用方法。
二、实验内容
基于套接字、多线程、同步锁机制实现多媒体文件的收发;
发送端Ubuntu的PC机读取文件,每1024个字节组成一个包通过TCP报文发送到接收端;接收端SE5上启动2个线程,线程1接收报文并将报文存入缓存;线程2通过缓存读取报文存入文件中;要求线程1和线程2之间通过同步锁进行线程同步。
- 编写代码,通过OpenCV读取图片文件,并调用BMCV的bmcv_sobel、bmcv_canny函数来实现对图片的边缘检测,最后输出检测结果。
- 直接利用OpenCV的边缘检测接口,实现边缘检测功能;
- 对比OpenCV与BMCV边缘检测所需要的时间;
三、开发环境
开发主机:Ubuntu 22.04 LTS
硬件:算能SE5
本地如果有SE5硬件,则可以PC机作为客户端,SE5作为服务器端。本地如果没有SE5硬件,只有云空间,则可以直接将客户端和服务器端都通过云空间实现,机在云空间的SE5模拟环境中实现。
四、实验器材
开发主机 + 云平台
五、实验过程与结论
5.1 BMCV关键函数解析
请参考算能BMCV开发资料:《BMCV User Guide》,也可以通过以下网址下载:
https://doc.sophgo.com/docs/2.7.0/docs_latest_release/bmcv/BMCV_User_Guide_zh.pdf
OpenCV的开发资料可参考《OpenCV官方文档》。
算能BMCV提供了bmcv_image_sobel和bmcv_image_canny函数用于进行边缘检测。
bmcv_image_sobel:
bm_status_t bmcv_image_sobel (
bm_handle_t handle, //BMCV句柄
bm_image input, //输入的BMI图片(待处理)
bm_image output, //输出的BMI图片(处理结果)
int dx, //x 方向上的差分阶数
int dy) //y 方向上的差分阶数具体函数接口说明如下:
(1)第二个参数和第三个参数图像的格式为bm_image,bm_image 需要外部调用 bmcv_image_creat创建。image 内存可以使用 bm_image_alloc_dev_mem 或者 bm_image_copy_host_to_device来开辟新的内存,或者使用 bmcv_image_attach 来 attach 已有的内存。
(2)dx, dy取值皆为1或0。 其中,dx=1,dy=0,表示计算X方向的导数,检测出的是垂直方向上的边缘;dx=0,dy=1,表示计算Y方向的导数,检测出的是垂直方向上的边缘。
(3) Sobel 核的大小,必须是-1,1,3,5 或7。其中特殊地,如果是-1 则使用3×3 Scharr 滤波器,如果是1 则使用3×1 或者1×3 的核。默认值为3。scale 为对求出的差分结果乘以的系数,默认值为1。Delta为在输出最终结果之前加上该偏移量,默认值为0。通常不需要对scale和Delta进行设置。
bmcv_image_canny:
bm_status_t bmcv_image_canny (
bm_handle_t handle,
bm_image input,
bm_image output,
float threshold1,
float threshold2,
int aperture_size = 3,
bool l2gradient = false);具体函数接口说明如下:
(1)第二个参数和第三个参数图像的格式为bm_image,bm_image 需要外部调用 bmcv_image_create 创建。image 内存可以使用 bm_image_alloc_dev_mem 或者 bm_image_copy_host_to_device来开辟新的内存,或者使用 bmcv_image_attach 来 attach 已有的内存。
(2)threshold1 和threshold2 为双阈值法的第一、第二个阈值。aperture_size 为 其中Sobel 核的大小,目前仅支持3。l2gradient 表示是否使用L2 范数来求图像梯度, 默认值为false,默认为由L1范数来求解图像梯度。
注意,BMCV的函数接口都是基于BMI格式进行图像处理。如上面的函数说明,其中第二个参数和第三个参数都是基于bm_image格式的。因此,需要首先通过OpenCV读取图片,并将图片格式转换为BMI格式后,才可以调用bmcv_image_sobel和bmcv_image_canny函数进行边缘检测。
本实验及实验5,实验6,实验7中使用BMCV相关函数的基本处理流程如下图所示,仅需调整红框模块中所调用的API即可实现不同实验功能:
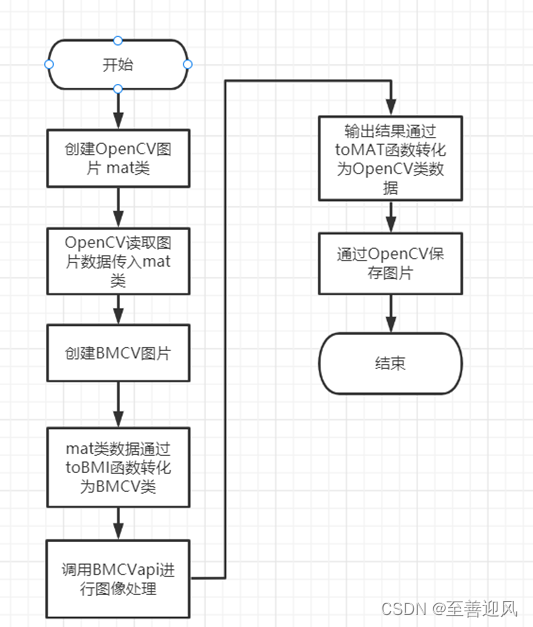
图4-1 实验流程框图
首先,本实例为了利用BMCV接口,需要引用相关的BMCV相关头文件:
#include "bmcv_api.h"创建Mat类对象并读取图片数据:
# 创建OpenCV类对象
cv::Mat Input,Out;
# 读取第二个命令行参数存入mat对象中(读取数据)
Input = cv::imread(argv[1], 0);注意,这里OpenCV类读取到的图片文件输出的格式是MAT格式,而BMCV处理的图片是bm_image格式,即BMCV对象。因此,我们需要先创建BMCV对象,然后将OpenCV类读取到的图片通过toBMI接口转换为BMCV对象。
# 创建BMCV对象
bm_image input, output;
bm_image_create(handle,height,width,FORMAT_GRAY,DATA_TYPE_EXT_1N_BYTE,&input);
# 以下是c++智能指针:划分一块内存区域并获取其信息
std::unique_ptr<unsigned char[]> src_data(new unsigned char[width * height]);
std::unique_ptr<unsigned char[]> res_data(new unsigned char[width * height]);BMCV对象操作要求,在对象创建后,需要为该对象申请内部管理内存。如下函数所示:
bm_image_alloc_contiguous_mem(1, &input);
bm_image_alloc_contiguous_mem(1, &output);也可以通过bm_image_alloc_dev_mem(input)函数申请内存:
bm_image_alloc_dev_mem(input)
bm_image_alloc_dev_mem(output);然后通过toBMI函数将OpenCV读取的图片mat类数据转化为BMCV类数据,再调用bmcv_image_sobel函数进行处理:
cv::bmcv::toBMI(Input,&input);
# Sobel边缘检测
bmcv_image_sobel(handle, input, output, 0, 1)需要注意的是这里用了toBMI函数实际内部做了一个内存同步的操作。也就是OpenCV读取的mat格式图片实际处于系统内存中,通过toBMI转换后同步到设备内存中。这里也可以通过bm_image_copy_host_to_device函数完成内存的同步。具体见上述的《BMCV User Guide》110页中的示例代码所采用的方法。
将处理结果转化为mat数据格式保存
cv::bmcv::toMAT(&output, Out);
cv::imwrite("out.jpg", Out);销毁内存
bm_image_free_contiguous_mem(1, &input);
bm_image_free_contiguous_mem(1, &output);
bm_image_destroy(input);
bm_image_destroy(output);
bm_dev_free(handle);综上,我们可以得到利用BMCV sobel函数进行图像边缘检测的关键代码如下:
#include <iostream>
#include <vector>
#include "bmcv_api.h"
#include "common.h"
#include "stdio.h"
#include "stdlib.h"
#include "string.h"
#include <memory>using namespace cv;
using namespace std;int main(int argc, char *argv[]) {
bm_handle_t handle; //获取句柄 bm_dev_request(&handle, 0);int width = 600; //定义图片数据 int height = 600;cv::Mat Input,Out,Test; Input = cv::imread(argv[1], 0); //opencv读取图片,通过命令行参数传入// 智能指针获取分配内存数据 std::unique_ptr<unsigned char[]> src_data(new unsigned char[width * height]);std::unique_ptr<unsigned char[]> res_data(new unsigned char[width * height]);// bmcv处理 bm_image input, output;bm_image_create(handle,height,width,FORMAT_GRAY, DATA_TYPE_EXT_1N_BYTE,&input);bm_image_alloc_contiguous_mem(1, &input, 1); // 分配device memory unsigned char * input_img_data = src_data.get();bm_image_copy_host_to_device(input, (void **)&input_img_data);bm_image_create(handle,height,width,FORMAT_GRAY,DATA_TYPE_EXT_1N_BYTE,&output);bm_image_alloc_contiguous_mem(1, &output, 1); cv::bmcv::toBMI(Input,&input); //自动进行内存同步// bmcv图像处理:caif (BM_SUCCESS != bmcv_image_sobel(handle, input, output, 0, 1)) {std::cout << "bmcv sobel error !!!" << std::endl;bm_image_destroy(input);bm_image_destroy(output);bm_dev_free(handle);return -1;}// 将输出结果转成mat数据并保存 cv::bmcv::toMAT(&output, Out);cv::imwrite("out.jpg", Out);bm_image_free_contiguous_mem(1, &input);bm_image_free_contiguous_mem(1, &output);bm_image_destroy(input);bm_image_destroy(output);bm_dev_free(handle);return 0;
}如果采用bmcv_image_canny函数进行边缘检测,只需要将上述代码中的bmcv_image_sobel函数改为bmcv_image_canny函数即可:
// bmcv图像处理:canny
if (BM_SUCCESS != bmcv_image_canny(handle, input, output, 0, 200)) {td::cout << "bmcv canny error !!!" << std::endl;bm_image_destroy(input);bm_image_destroy(output);bm_dev_free(handle);exit(-1);
}编写makfile文件:
DEBUG ?= 0
PRODUCTFORM ?= soc
BM_MEDIA_ION ?= 0INSTALL_DIR ?= release//注意:这个地方一定要根据自己的目录路径进行设置
top_dir :=../../..ifeq ($(PRODUCTFORM),x86) # pcie modeCROSS_CC_PREFIX = x86_64-linux-
else # pcie_arm64 and soc modeCROSS_CC_PREFIX = aarch64-linux-gnu-
endifCC = $(CROSS_CC_PREFIX)gcc
CXX = $(CROSS_CC_PREFIX)g++CPPFLAGS := -std=gnu++11 -fPIC -Wall -Wl,--fatal-warning
ifeq ($(DEBUG), 0)CPPFLAGS += -O2
elseCPPFLAGS += -g
endif# NATIVE API SDK
NATIVE_SDK_HEADERS:=-I$(top_dir)/include/decode
NATIVE_SDK_LDFLAGS:=-L$(top_dir)/lib/decode/${PRODUCTFORM}
NATIVE_SDK_LDLIBS :=-lbmion -lbmjpulite -lbmjpuapi -lbmvpulite -lbmvpuapi -lbmvideo -lbmvppapi -lyuv# FFMPEG SDK
FF_SDK_HEADERS := -I$(top_dir)/include/ffmpeg
FF_SDK_LDFLAGS := -L$(top_dir)/lib/ffmpeg/$(PRODUCTFORM)
FF_SDK_LDLIBS := -lavcodec -lavformat -lavutil -lswresample -lswscale# OpenCV SDK
OCV_SDK_HEADERS := -I$(top_dir)/include/opencv/opencv4
OCV_SDK_LDFLAGS := -L$(top_dir)/lib/opencv/$(PRODUCTFORM)
OCV_SDK_LDLIBS := -lopencv_core -lopencv_imgcodecs -lopencv_imgproc -lopencv_videoio# BMCV SDK
BMCV_SDK_HEADERS := -I$(top_dir)/include/bmlib
BMCV_SDK_LDFLAGS := -L$(top_dir)/lib/bmnn/$(PRODUCTFORM)
ifeq (${PRODUCTFORM}, x86)
BMCV_SDK_LDFLAGS := -L$(top_dir)/lib/bmnn/pcie
endif
BMCV_SDK_LDLIBS := -lbmcv -lbmlibCPPFLAGS += $(NATIVE_SDK_HEADERS) $(FF_SDK_HEADERS) $(OCV_SDK_HEADERS) $(BMCV_SDK_HEADERS)
LDFLAGS := $(NATIVE_SDK_LDFLAGS) $(FF_SDK_LDFLAGS) $(OCV_SDK_LDFLAGS)LDLIBS := $(NATIVE_SDK_LDLIBS) $(FF_SDK_LDLIBS) $(OCV_SDK_LDLIBS) $(BMCV_SDK_LDLIBS) -lpthread -lstdc++TARGET=bmcv_sobel
MAKEFILE=Makefile
ALLOBJS=*.o
ALLDEPS=*.dep
RM=rm -rf
CP=cp -fSOURCES := bmcv_sobel.cppOBJECTPATHS:=$(patsubst %.cpp,%.o,$(SOURCES)).phony: all cleanall: $(TARGET)$(TARGET): $(OBJECTPATHS)$(CC) -o $@ $(OBJECTPATHS) $(LDFLAGS) $(LDLIBS)install: $(TARGET)install -d $(INSTALL_DIR)/bininstall $(TARGET) $(INSTALL_DIR)/binuninstall:$(RM) $(INSTALL_DIR)/bin/$(TARGET) clean:$(RM) $(TARGET)$(RM) $(ALLDEPS)$(RM) $(ALLOBJS)bmcv_sobel.o : bmcv_sobel.cpp $(MAKEFILE)$(CXX) $(CPPFLAGS) -c $< -o $@ -MD -MF $(@:.o=.dep)
LDLIBS := $(NATIVE_SDK_LDLIBS) $(FF_SDK_LDLIBS) $(OCV_SDK_LDLIBS) $(BMCV_SDK_LDLIBS) -lpthread -lstdc++TARGET=bmcv_sobel
MAKEFILE=Makefile
ALLOBJS=*.o
ALLDEPS=*.dep
RM=rm -rf
CP=cp -fSOURCES := bmcv_sobel.cppOBJECTPATHS:=$(patsubst %.cpp,%.o,$(SOURCES)).phony: all cleanall: $(TARGET)$(TARGET): $(OBJECTPATHS)$(CC) -o $@ $(OBJECTPATHS) $(LDFLAGS) $(LDLIBS)install: $(TARGET)install -d $(INSTALL_DIR)/bininstall $(TARGET) $(INSTALL_DIR)/binuninstall:$(RM) $(INSTALL_DIR)/bin/$(TARGET) clean:$(RM) $(TARGET)$(RM) $(ALLDEPS)$(RM) $(ALLOBJS)bmcv_sobel.o : bmcv_sobel.cpp $(MAKEFILE)$(CXX) $(CPPFLAGS) -c $< -o $@ -MD -MF $(@:.o=.dep)5.2 BMCV执行结果
向云平台或SE5上传待检测的图片,并执行如下代码:
./bmcv_sobel greycat.jpeg bmcv
运行程序后,对同一张图片进行处理所得出的sobel和canny边缘检测的两个结果:
Sobel:

Canny:

如上图所示,两种边缘检测都能大概检测出图像边缘,但精细程度不同。在实际应用时可选择自己所适合的方式选择合适的边缘检测方式。
5.3 OpenCV关键函数解析
OpenCV也提供了Sobel和Canny边缘检测算子,具体函数原型如下:
void cv::Canny(InputArray image,OutputArray edges,double threshold1,double threshold2,int apertureSize = 3,bool L2gradient = false
)void cv::Sobel(InputArray src,OutputArray dst, //输出图像,与输入图像src具有相同的尺寸和通道数,数据类型由第三个参数ddepth控制。int ddepth, // ddepth:输出图像的数据类型(深度), 为-1时,输出图像的数据类型自动选择。int dx,int dy,int ksize = 3,double scale = 1,double delta = 0,int borderType = BORDER_DEFAULT) //像素外推法选择标志,默认为//BORDER_DEFAULT,表示不包含边界值倒序填充。
同名参数的含义与BMCV中参数含义相同。OpenCV下,不需要进行BMI转换,直接可以将读取到的MAT格式的图片通过sobel 和Canny接口进行处理。如下图所示:
//头文件
#include <opencv2/core.hpp>
#include <opencv2/imgcodecs.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
....
//关键代码
cv::Mat srcImage = cv::imread(argv[1], 1);
cv::Mat grayImage;
cv::Mat srcImage1 = srcImage.clone();
cvtColor(srcImage, grayImage, COLOR_BGR2GRAY);
Mat dstImage, edge;
dstImage.create(srcImage1.size(), srcImage1.type());
dstImage = Scalar::all(0);
srcImage1.copyTo(dstImage, edge);5.4 硬件加速性能对比
此外,在算能云平台上,基于BMCV的sobel函数,因为使用了硬件加速,所以可以提升速率。
为验证执行程序所需的时间,须在运行时通过time命令来实现,如下图所示:


第一张图为用OpenCV的sobel函数所需时间,第二张图为用bmcv的sobel函数时所需的时间。经硬件加速后,程序所需的运行时间明显减少。
这篇关于福州大学《嵌入式系统综合设计》实验四:边缘检测的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





