本文主要是介绍笔记——三大串行总线SPI、IIC、UART,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
主要参考博客:https://blog.csdn.net/oqqHuTu12345678/article/details/65445338?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522162786877116780262519377%2522%252C%2522scm%2522%253A%252220140713.130102334…%2522%257D&request_id=162786877116780262519377&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2allbaidu_landing_v2~default-1-65445338.first_rank_v2_pc_rank_v29&utm_term=%E4%B8%89%E5%A4%A7%E4%B8%B2%E8%A1%8C%E6%80%BB%E7%BA%BF&spm=1018.2226.3001.4187
一、名字
SPI(serial Peripheral Interface:串行外设接口),是motorola公司提出的一种同步串行数据传输标准;
I2C(INTER IC BUS:IC之间总线),是由PHILIPS公司开发的两线式串行总线,用于连接微控制器及其外围设备;
UART(Universal Asynchronous Receiver Transmitter:通用异步收发器),是电脑硬件的一部分,它把将要传输的资料在串行通信与并行通信之间加以转换,UART通常被集成于其他通讯接口的连接上。UART即我们通常说的“串口”。
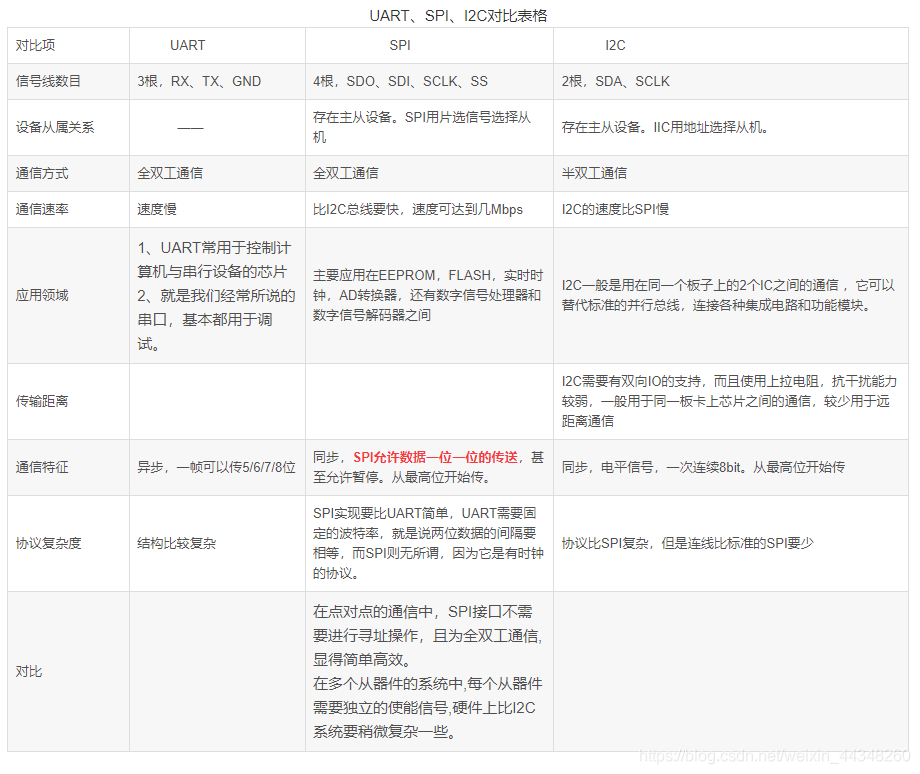
二、UART、SPI、I2C对比
三、串行外设接口:SPI
1、速览点
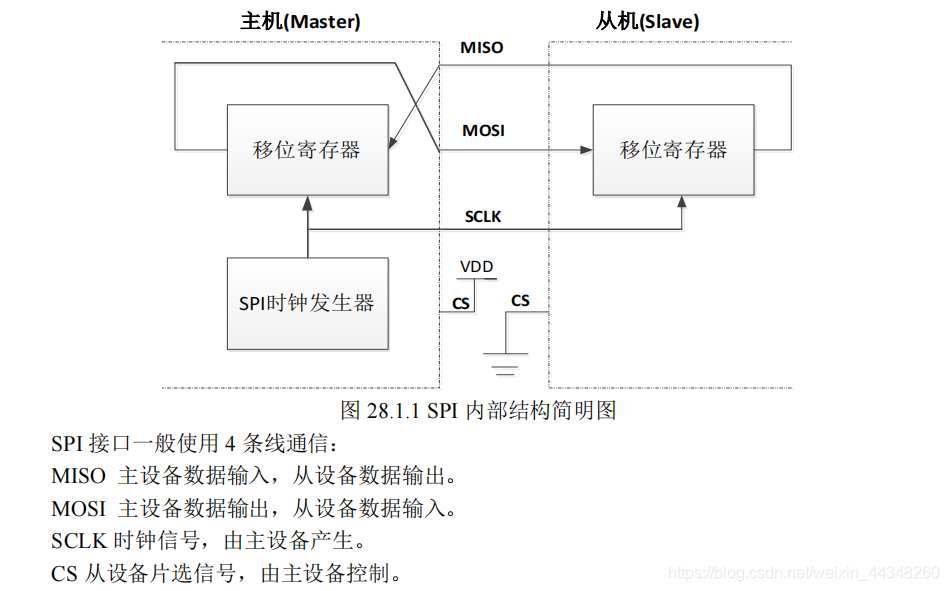
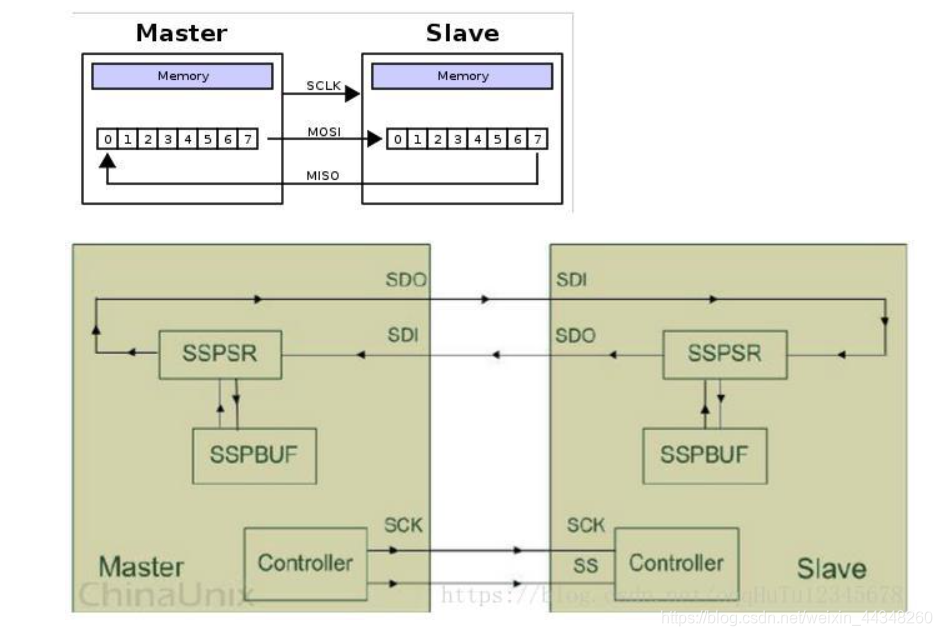
(1)四条信号线:串行时钟(SCLK)、串行数据输出(SDO)、串行数据输入(SDI)、片选线(SS)。(所谓的进出,是针对信号进出主机而言)。
(2)SPI总线可以实现多SPI设备互相连接。提供时钟的SPI设备为主设备(Master),其他设备为从设备(Slave)。SCLK信号线只由主设备控制,从设备不能控制信号线。
(3)在SPI总线上,某一时刻可以出现多个从机,但只能存在一个主机。主机通过片选线来确定要通信的从机。这就要求从机的MISO口具有三态特性,使得该口线在器件未被选通时表现为高阻抗。
(4)主从设备间可以实现全双工通信,收发独立,操作简单,数据传输速率较高,但需要占用主机较多的口线(每个从机都需要一根片选线),而且只支持单个主机,没有指定的流控制,没有应答机制确认是否接收到数据。
(5)数据输出通过SDO线,数据在时钟上沿或下沿时改变(即发送),在紧接着的下沿或上沿被读取,从而完成一位数据传输。数据输入也使用同样原理。因此,8位数据的传输,至少需要8次时钟信号的改变(上沿和下沿为一次)。
(6)普通的串行通讯一次连续传送至少8位数据,而SPI允许数据一位一位的传送,甚至允许暂停,因为SCK时钟线由主控设备控制,当没有时钟跳变时,从设备不采集或传送数据。也就是说,主设备通过对SCK时钟线的控制可以完成对通讯的控制。
(7)SPI接口在CPU和外围低速器件之间进行同步串行数据传输,在主器件的移位脉冲下,数据按位传输,高位在前(先传?),低位在后,为全双工通信。
2、数据传输
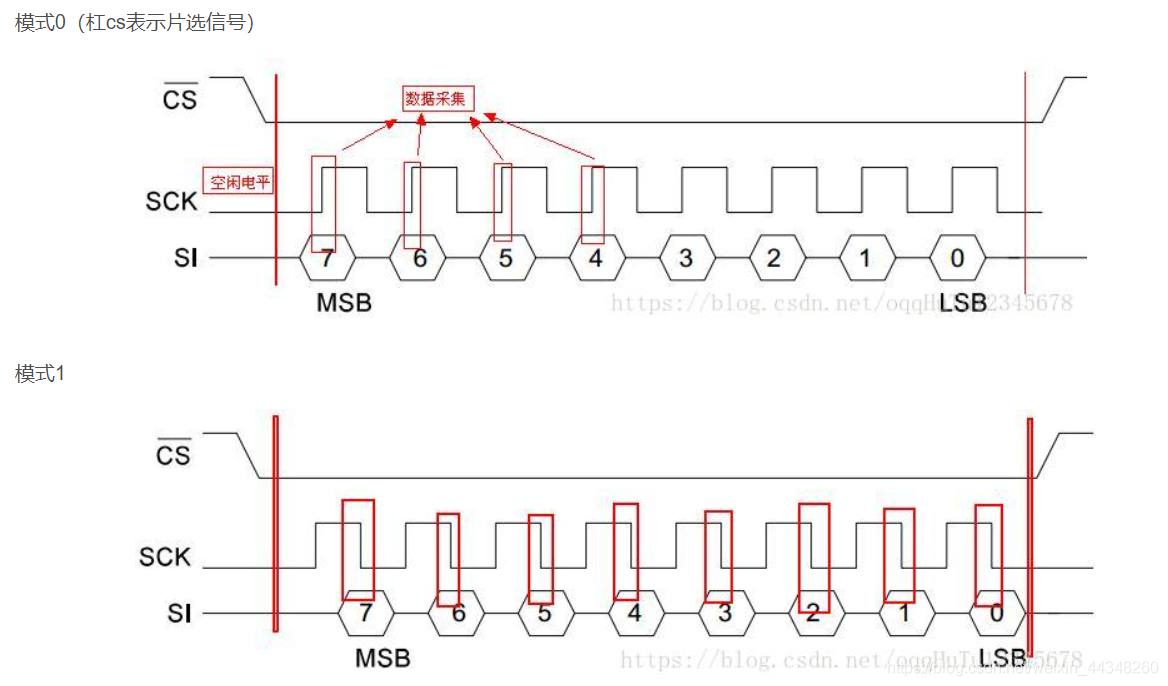
(1)SPI在数据传输的时候,需要确定两件事情:
- 其一,数据是在时钟的上升沿采集还是下降沿采集;
- 其二,时钟的初始(空闲)状态是为高电平还是低电平。
- 对比:I2C空闲状态时,时钟线(不是数据线?)为高电平,数据采集时,时钟线也为高电平,但SPI给出了更自由的方式
(2)两个概念
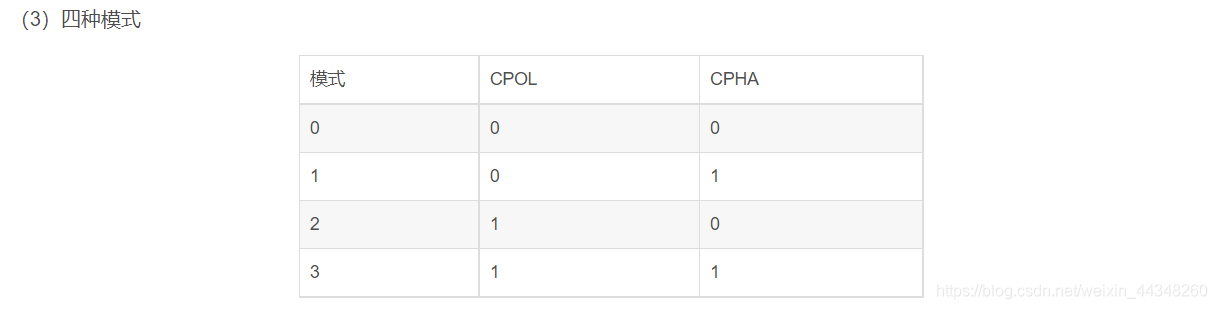
CPOL:时钟极性,表示SPI在空闲时,时钟信号是高电平还是低电平。
CPHA:时钟相位,表示SPI设备是在在时钟的上升沿采集还是下降沿采集。
如果CPOL=0,串行同步时钟的空闲状态为低电平;如果 CPOL=1,串行同步时钟的空闲状态为高电
平。时钟相位(CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。如果CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果 CPHA=1,在串行同步时钟的第二个跳变沿(上升或下降)数据被采样。SPI 主模块和与之通信的外设备时钟相位和极性应该一致。
则SPI数据传输就有四种可能—按照标准的说法,SPI数据传输就有四种模式。

3、spi读写
(1)SPI在硬件设计上采用的双数据线制,根据设计,在SPI通信过程中,主从设备之间会形成一个数据环形链路——即主设备向从设备写一次数据,从设备就会回一次数据(至于从设备回复的数据是否有效,则另当别论——如果有效,主设备就把它读入,否则丢弃)。
(2)例子:假设上升沿发送、下降沿接收、高位先发送。
假设主机8位寄存器装的是待发送的数据10101010
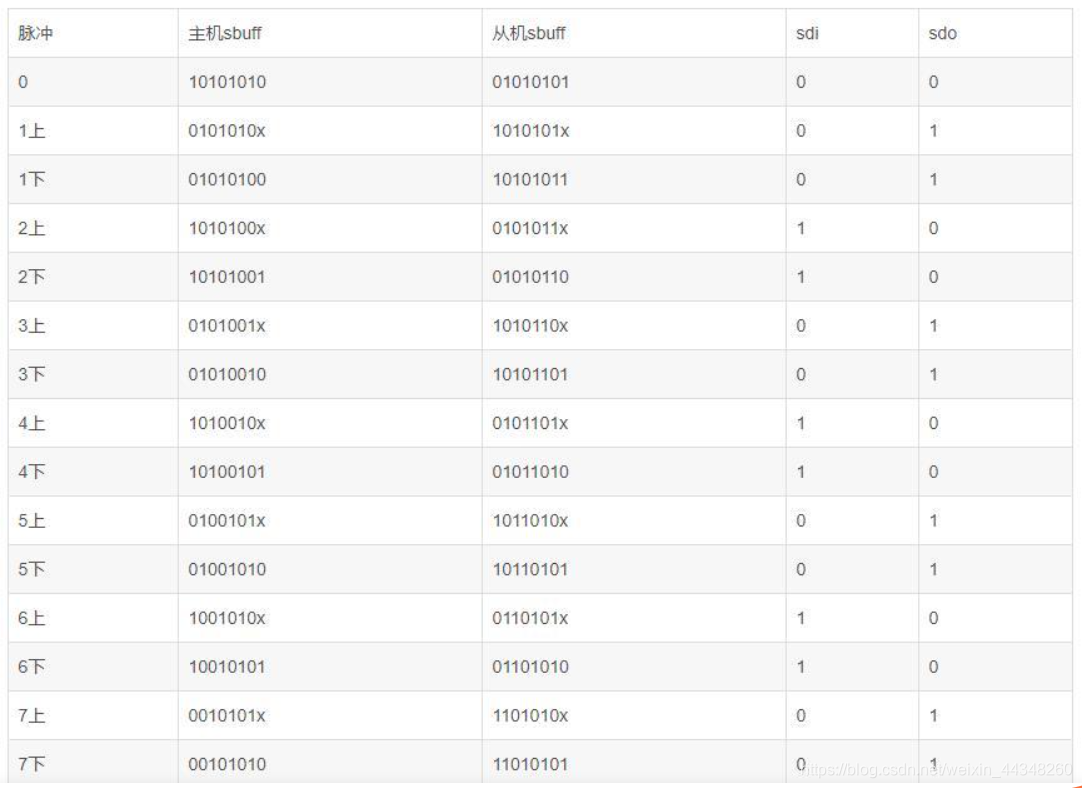
解析:
原数据为10101010
(1)上,
此时主机发送1Bit数据,即将最左边的1发送出去,故当前状态为0101010X,X表示未知,因为换没接收到从机发送来的数据;
此时从机发送1Bit数据,即将最左边的0发送出去,故当前状态为1010101X,X表示未知,因为换没接收到主机发送来的数据;
(2)上,
此时主机接收1Bit数据,故当前状态为01010100;
此时从机接收1Bit数据,故当前状态为10101011;
- 一个时钟周期内完成数据的接收与发送;
- 主机与从机都是高位先发送,接收到的数据填充到最右边;
- 由此可知八个时钟周期完成了一次数据交换。
四、IC之间总线:I2C
IIC(Inter-Integrated Circuit)总线是一种由 PHILIPS 公司开发的两线式串行总线,用于连接微控制器及其外围设备。它是由数据线 SDA 和时钟 SCL 构成的串行总线,可发送和接收数据。在 CPU 与被控 IC 之间、IC 与 IC 之间进行双向传送,高速 IIC 总线一般可达 400kbps 以上。
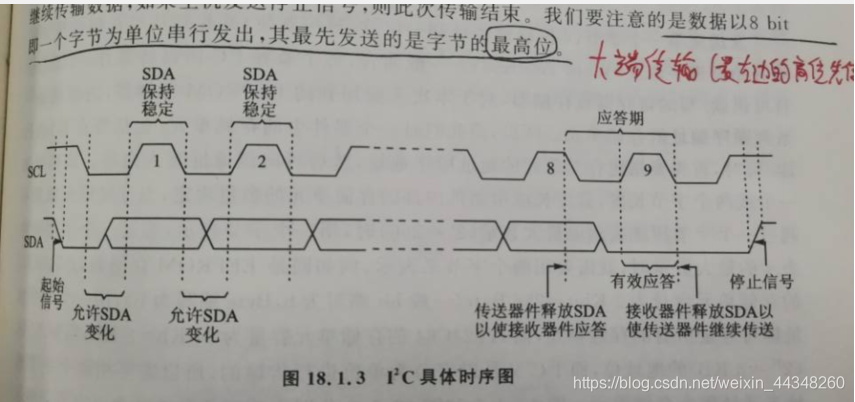
I2C 总线在传送数据过程中共有三种类型信号, 它们分别是:开始信号、结束信号和应答
信号。
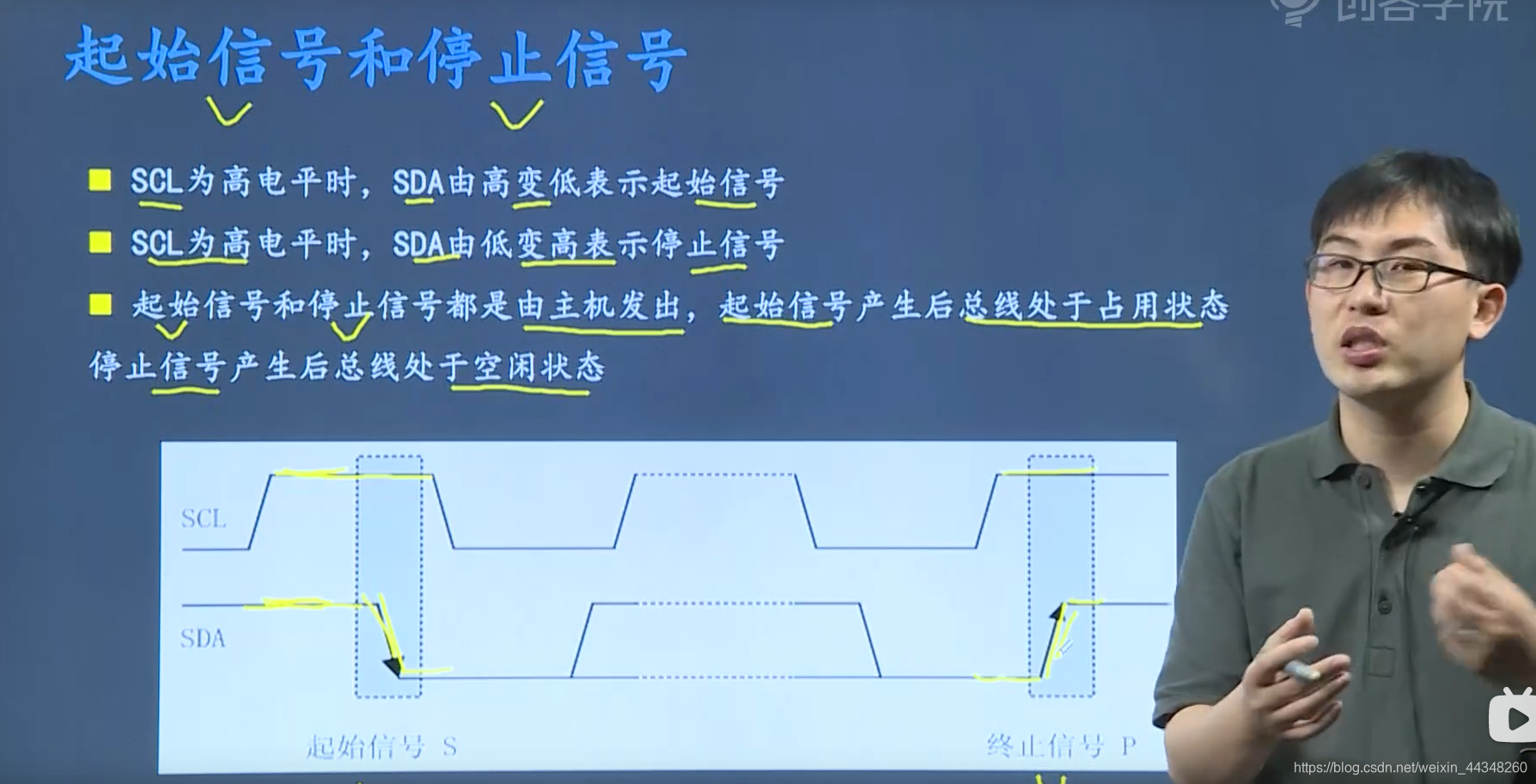
- 开始信号:SCL 为高电平时,SDA 由高电平向低电平跳变,开始传送数据。
- 结束信号:SCL 为高电平时,SDA 由低电平向高电平跳变,结束传送数据。
- 应答信号:接收数据的 IC 在接收到 8bit 数据后,向发送数据的 IC 发出特定的低电平脉冲,表示已收到数据。CPU 向受控单元发出一个信号后,等待受控单元发出一个应答信号,CPU 接收到应答信号后,根据实际情况作出是否继续传递信号的判断。若未收到应答信号,由判断为受控单元出现故障。
1、速览点
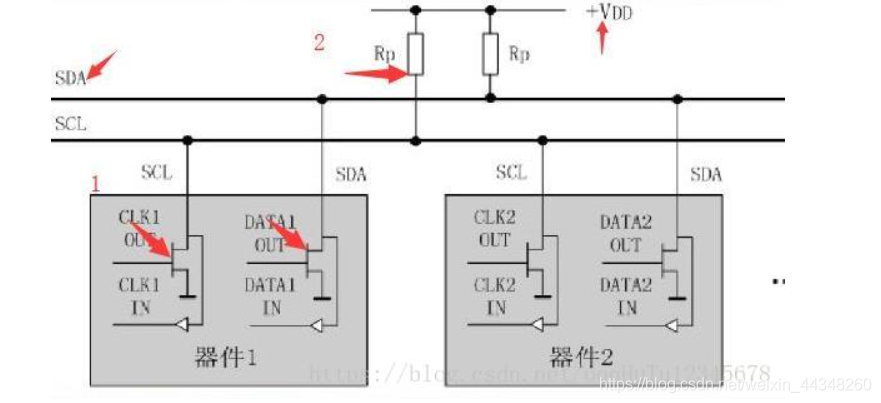
(1)由图可知
- 由两条信号线组成:串行数据线(SDA)、串行时钟线(SCL)。
- 由1,2箭头指示可知,I2C器件内部采用开漏的方法,总线被上拉。
- 那么总线状态只能被下拉为0(当MOS管输入0的时候)。
- 只要有一方下拉了总线,总线状态必定为0。
(2)任何一个设备都能像主控器一样工作,并控制总线,但同一时刻只能有一个主控设备。
(3)总线上的每一个设备都有一个独一无二的地址,根据设备的能力,作为发射器或接收器工作。
(4)在它的协议体系中,传输数据时都会带上目的设备的设备地址,因此可以实现设备组网。
(5)连接到相同总线的IC 数量只受到总线的最大电容限制。
(6)SDA传输数据是大端传输(高位先传,低位后传?),是以字节为单位的。
2、通信过程
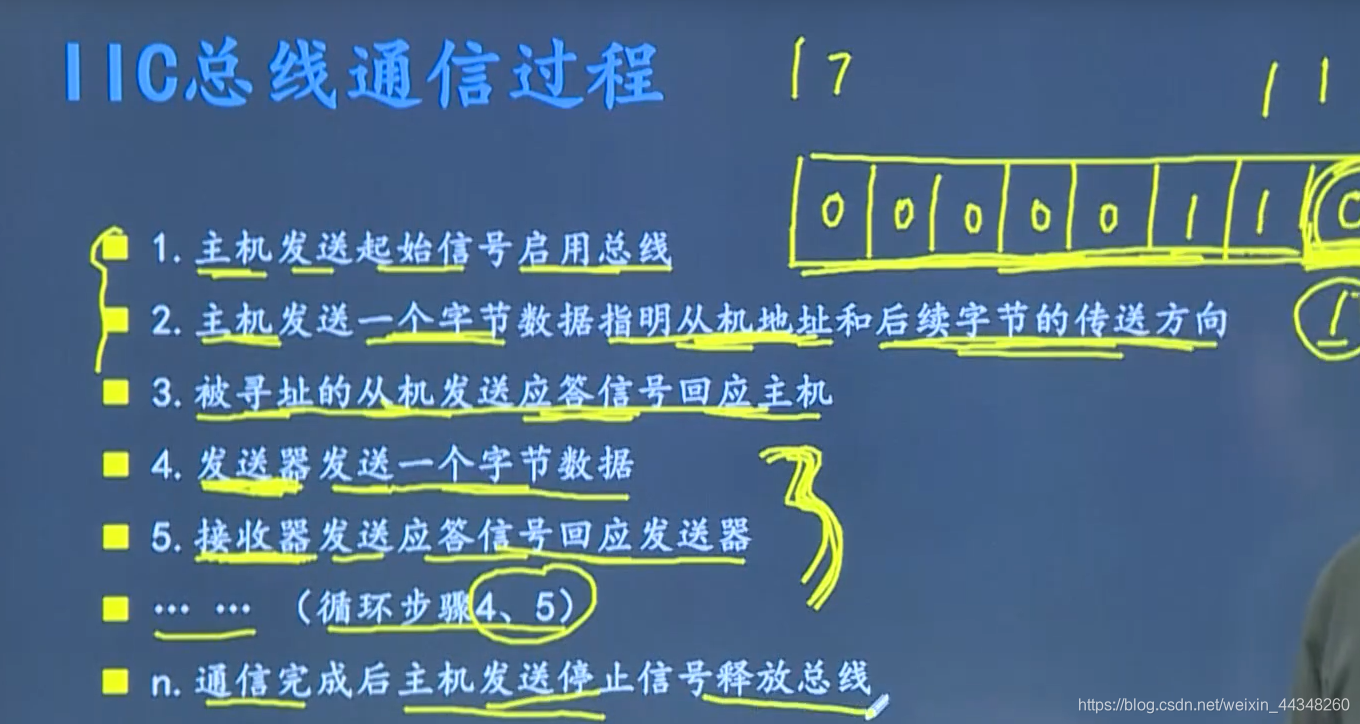
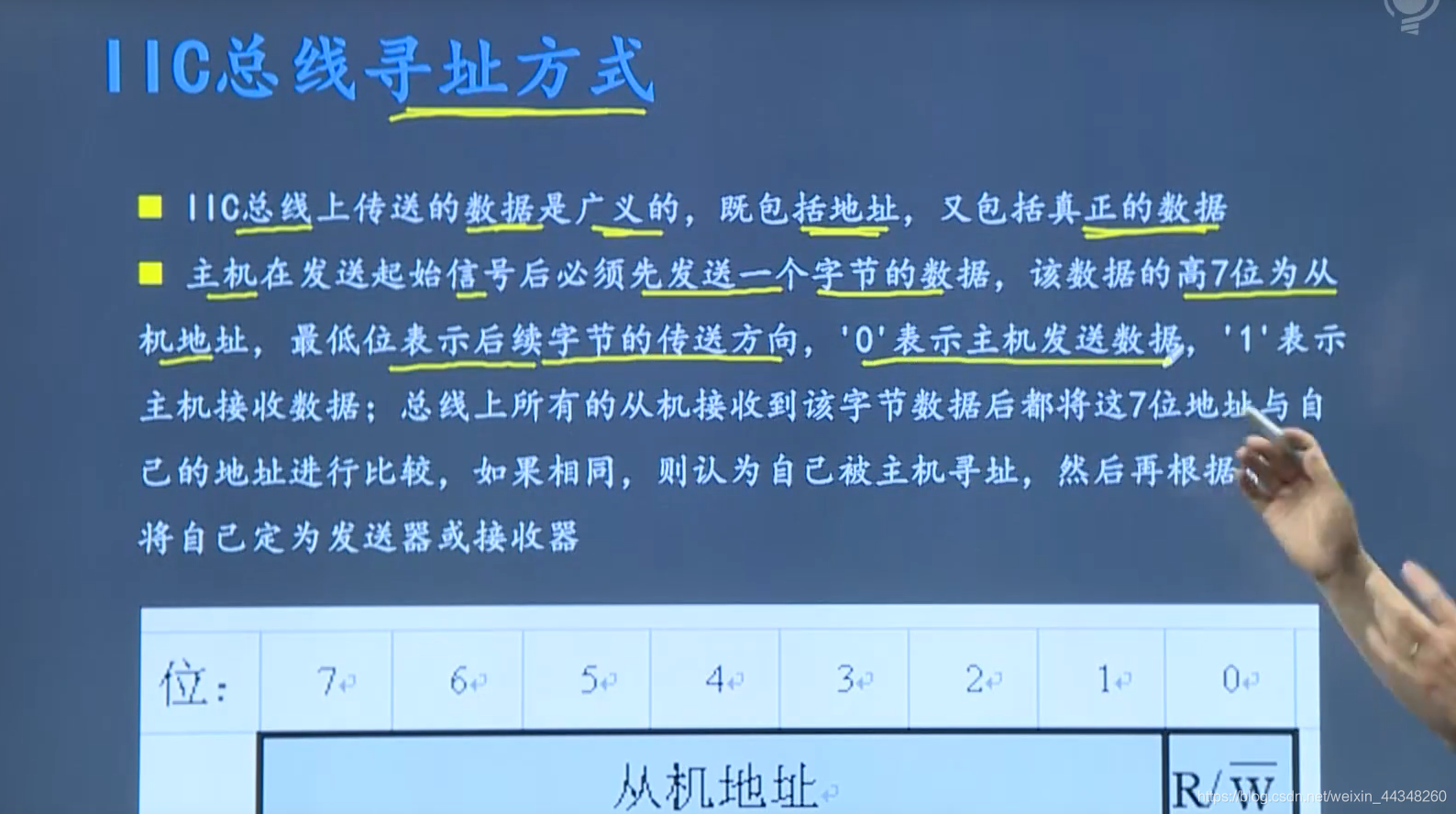
3、寻址方式
4、同步信号
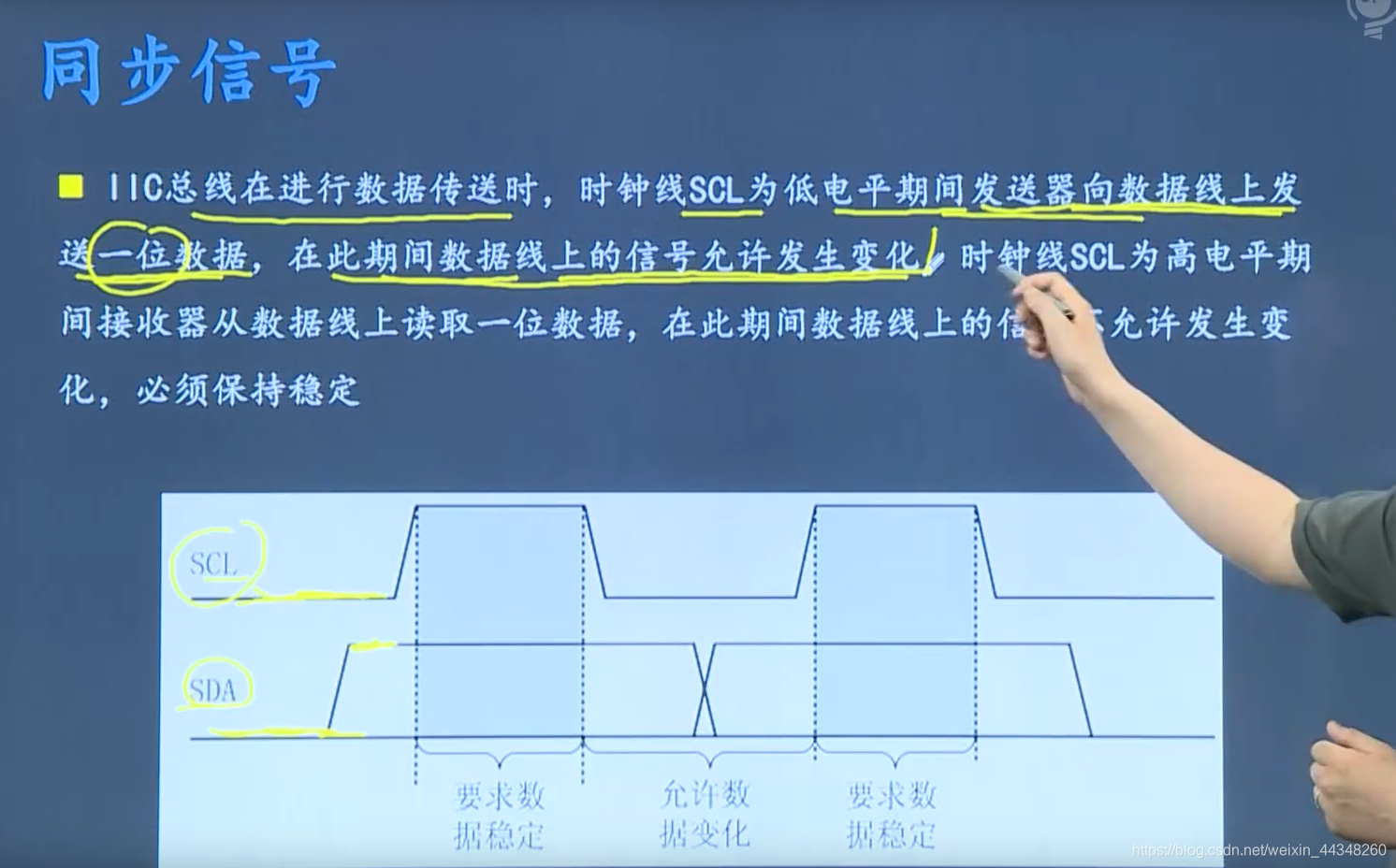
SCL为低电平时就是让发送器发送数据;
SCL为高电平就是让接收器接收数据的。
五、通用异步收发器:UART
1、速览点
(1)UART由波特率产生器、UART接收器、UART发送器组成。
(2)由三条信号线组成:RX、TX、GND
(3)UART包括RS232、RS499、RS423、RS422和RS485等接口标准规范和总线标准规范。它们的主要区别在于其各自的电平范围不相同。 嵌入式设备中常常使用到的是TTL、TTL转RS232的这种方式。
(1)串口通信的特点:异步、电平信号、串行
-
异步:串口通信的发送方和接收方之间是没有统一的时钟信号的。
-
电平信号:串口通信出现时间早,速率较低,传输的距离较近,所以干扰还不太明显,因此当时使用了电平信号传输。后期出现的传输协议都改成差分信号传输了。
-
串行通信:串口通信每次同时只能传输1个二进制位。
(2)RS232电平和TTL电平
(1)电平信号是用信号线电平减去参考线电平得到电压差,这个电压差决定了传输值是1还是0。
(2)在电平信号时多少V代表1,多少V代表0不是固定的,取决于电平标准。
譬如RS232电平中-3V~-15V表示1;+3~+15V表示0;TTL电平则是+5V表示1,0V表示0。
RS232的电平定义比较大,适合干扰大、距离远的情况;TTL电平电压范围小,适合距离近且干扰小的情况。
台式电脑后面的串口插座就是RS232接口的,在工业上用串口时都用这个,传输距离小于15米;TTL电平一般用在电路板内部两个芯片之间。
TTL和CMOS
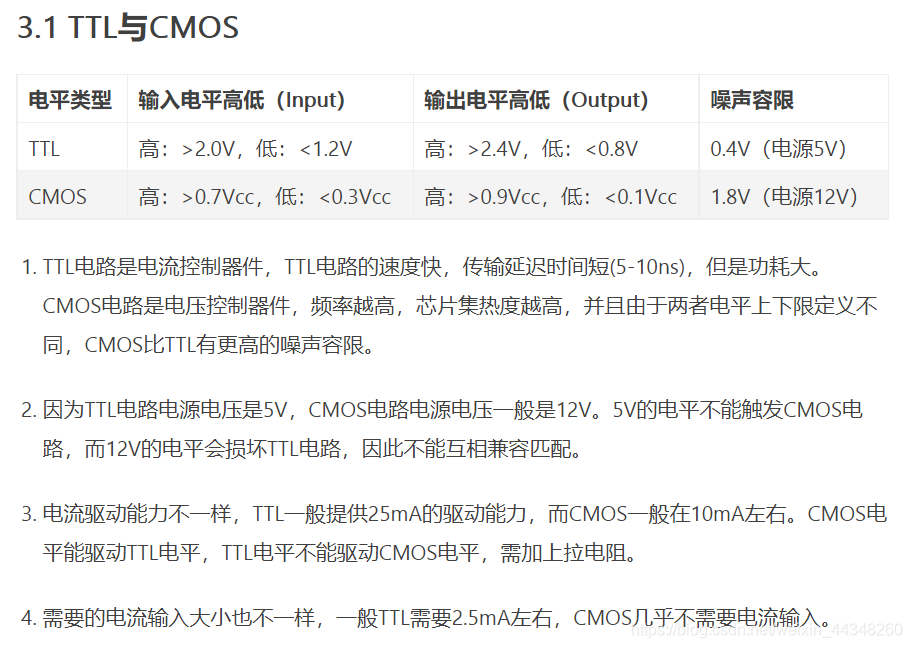
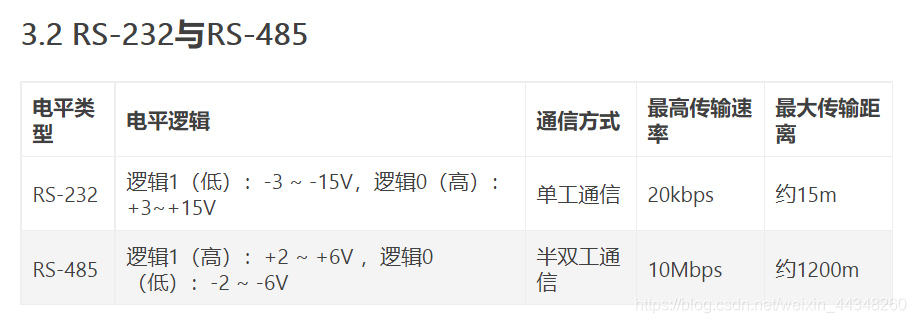
(3)RS232和RS485
2232存在的问题:
- 接口电平值较高,易损坏芯片,与TTL不兼容;
- 通信速度较低;
- 易产生共模干扰;
- 传输距离较短,(最长15m);
485优势
RS485采用差分信号负逻辑,逻辑"1”以两线间的电压差为-(2到6)V表示;逻辑"0"以两线间的电压差为+(2~6)V表示。接口信号电平比RS-232-C降低了,就不易损坏接口电路的芯片, 且该电平与TTL电平兼容,可方便与TTL电路连接。RS-485的数据最高传输速率为10Mbps。
- 差分信号更稳定;
- 适合长距离传输(最大1500米)
2、通信协议

(1)起始位:先发出一个逻辑”0”的信号,表示传输字符的开始。
(2)数据位:紧接着起始位之后。数据位的个数可以是4、5、6、7、8等,构成一个字符。通常采用ASCII码。
(3)奇偶校验位:数据位加上这一位后,使得“1”的位数应为偶数(偶校验)或奇数(奇校验),以此来校验资料传送的正确性。
奇偶校验位是用来给数据位进行奇偶校验(把待校验的有效数据逐个位的加起来,总和为奇数奇偶校验位就为1,总和为偶数奇偶校验位就为0)的,可以在一定程度上防止位反转。
(4)停止位:它是一个字符数据的结束标志。可以是1位、1.5位、2位的高电平。
(5)空闲位:处于逻辑“1”状态,表示当前线路上没有资料传送。
(6)波特率:数据传输的速率。有以下几个档位:300、600、1200、2400、4800、9600、19200、38400、43000、56000、57600、115200。在数据传输和接收双方,需要预先统一波特率,以便正确的传输数据。
六、总结
1、通信接口分为物理层和协议层
(1)物理层(硬件):如UART,PC和单片机通信,PC机的串口是232电平而单片机的串口是TTL电平,两个设备之间通信如果电平不一致就相当于语言不通,造成逻辑混乱。因此一般的单片机系统板上都会有一个串口模块电路(串口控制器)用来进行电平转换,将PC机的232电平转化成单片机能识别的232电平,常用芯片如PL2303、CH340。
(2)协议层:就相当于规定了一个标准或规则,比如SPI协议中,主机向从机发出一个数据,从机接收到后会发出应答信号,这就是协议规定的内容,不需要人为干预。当然有的单片机没有这些协议的控制器(硬件),如51单片机和24c02通信,需要模拟IIC协议,用软件来实现硬件的功能,这就增加了软件的复杂度。
2、总线的选择
(1)SPI总线有4根线,分别是SCLK,MOSI,MISO,CS,可以挂多个从设备,但是在挂多个从设备时,主设备端还需要做一个n选一的译码器,用于选择将要访问的从设备,因此,主设备上的管脚需求比较多。SPI总线在只有一个从设备时,只要用到SCK,SDO,SDI这三根线,此时选择SPI比I2C总线占优。
(2)I2C总线只有两根线,SCL,SDA.,也可以挂多个从设备,对从设备的选择直接依靠协议完成,无需增加物理连线。一般情况下,当一块电路板上有多个从设备时,往往选用I2C而非SPI,因为SPI增加了额外额硬件开销以及电路板走线。
(3)I2C和SPI总线一般是读取一些PROM等从设备用。 而串行通信接口SCI(UART?),主要应用在两个智能设备之间的互相通讯。有别于SPI和I2C总线的主从模式,SCI可以是主-主模式。
(4)数据吞吐/传输速度,,如果应用中必须使用高速数据传输,那么SPI是必然的选择。因为SPI是全双工,IIC 的不是。SPI没有定义速度限制,一般的实现通常能达到甚至超过10 Mbps。IIC 最高的速度也就快速+模式(1 Mbps)和高速模式(3.4 Mbps),后面的模式还需要额外的I/O缓冲区,还并不是总是容易实现的。
这篇关于笔记——三大串行总线SPI、IIC、UART的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






