本文主要是介绍STM32-HAL库09-CAN通讯(loopback模式),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、所用材料:
STM32F103C6T6最小系统板
STM32CUBEMX(HAL库软件)
MDK5
串口调试助手
二、所学内容:
初步学习如何使用STM32的CAN通讯功能,在本章节主要达到板内CAN通讯的效果,即32发送CAN信息再在CAN接收中断中用串口打印出来。
三、CUBEMX配置:
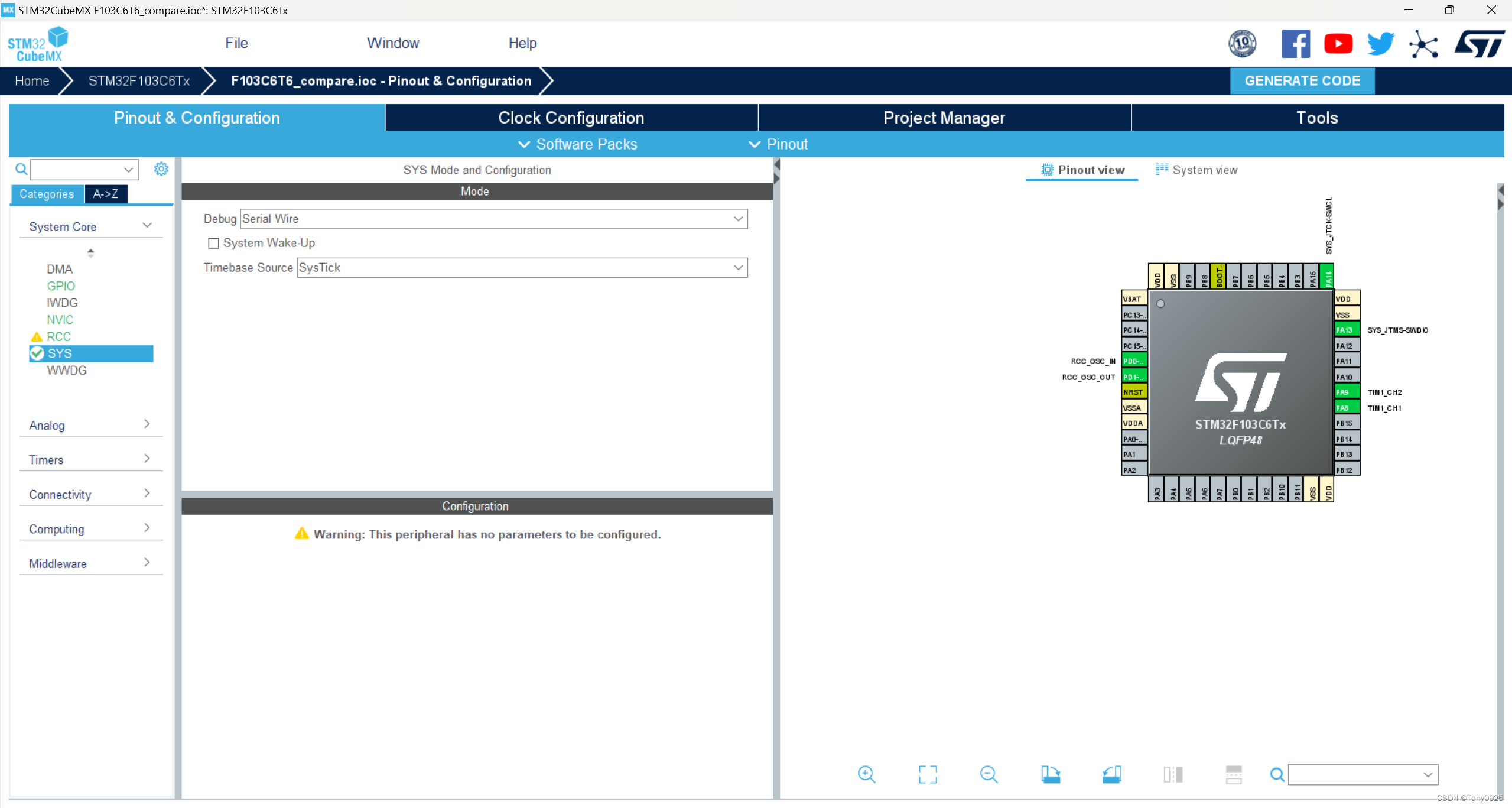
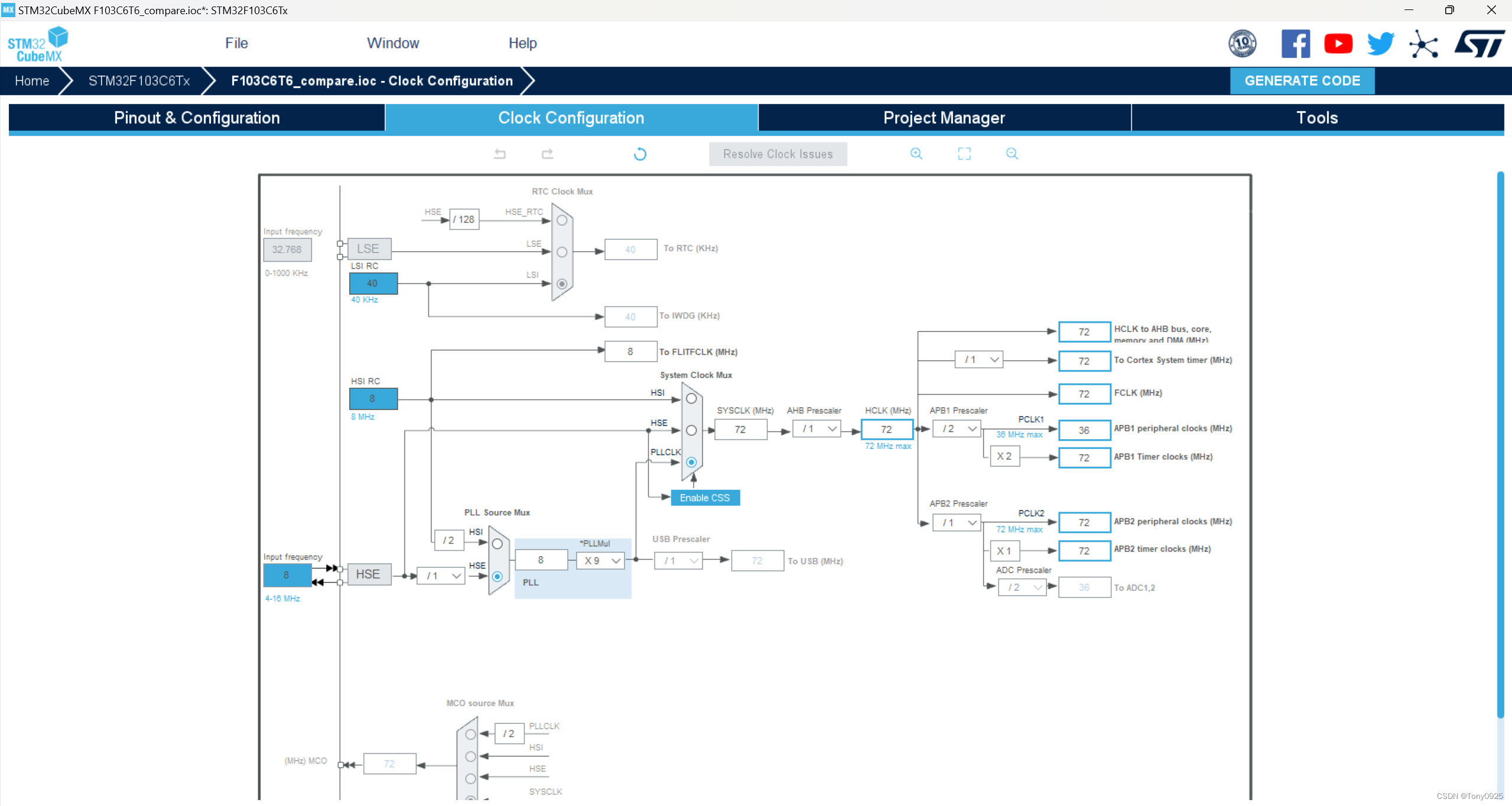
第一步:老三件套-RCC,SYS,时钟树配置

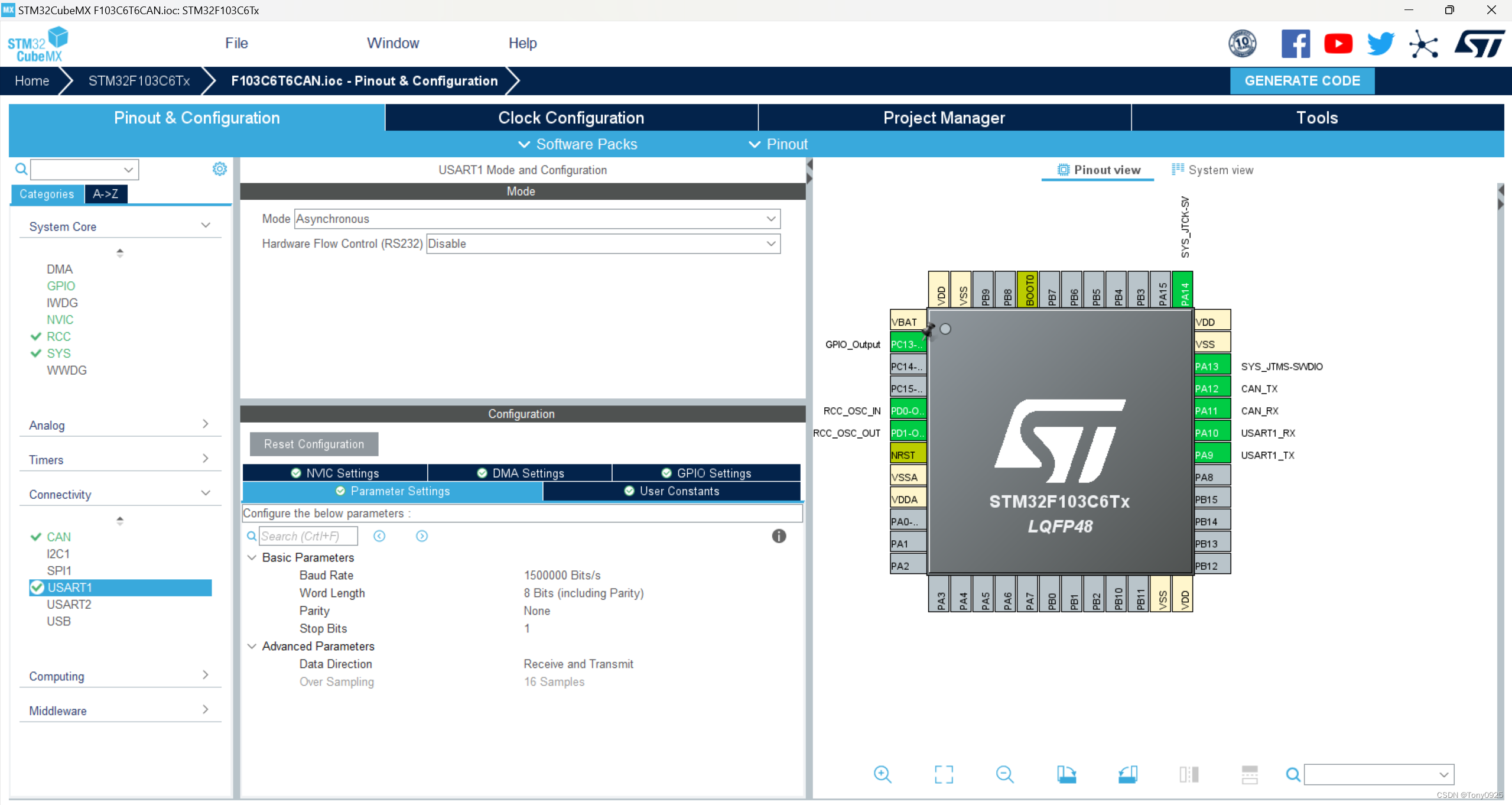
第二步:串口配置
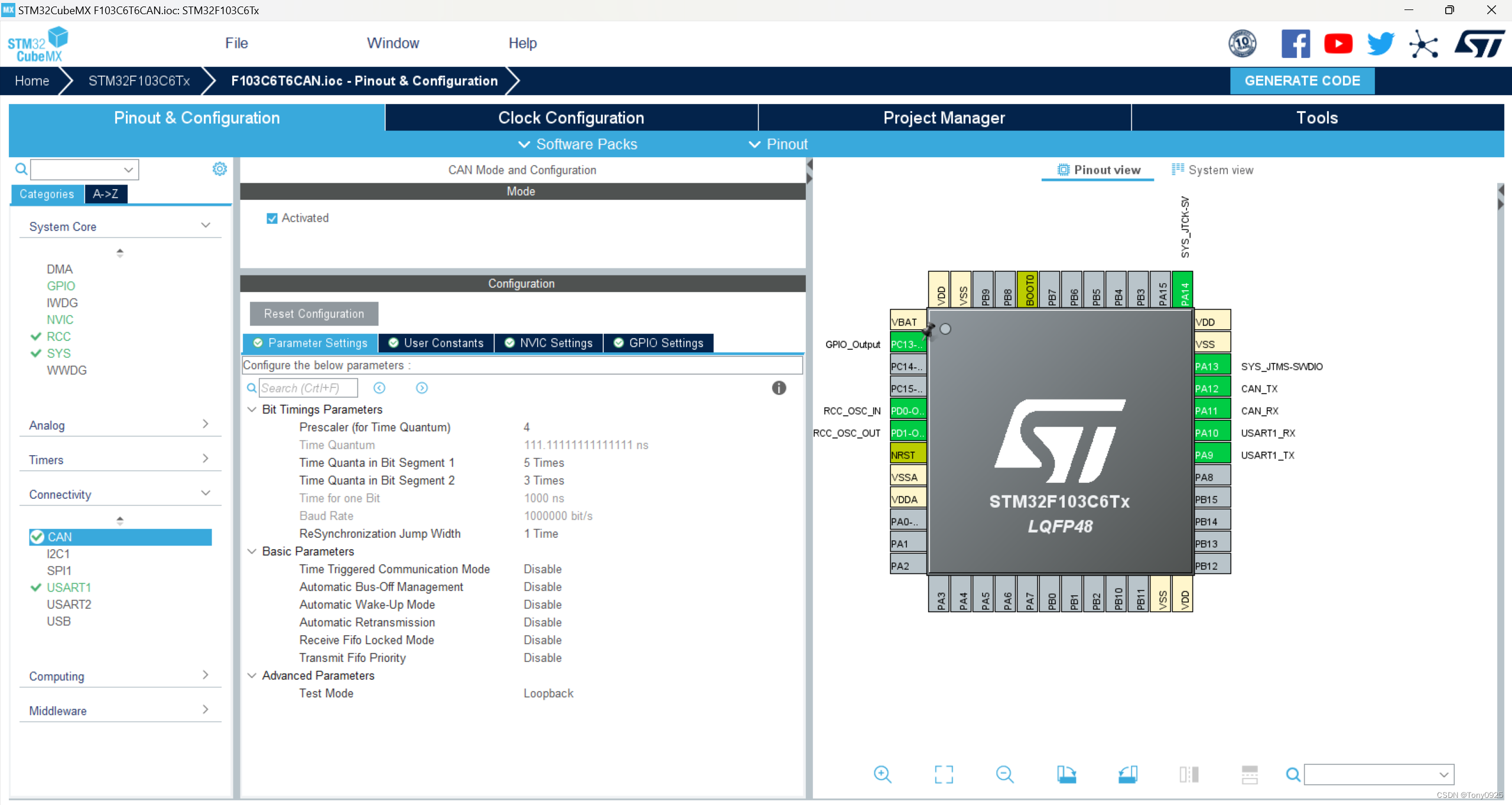
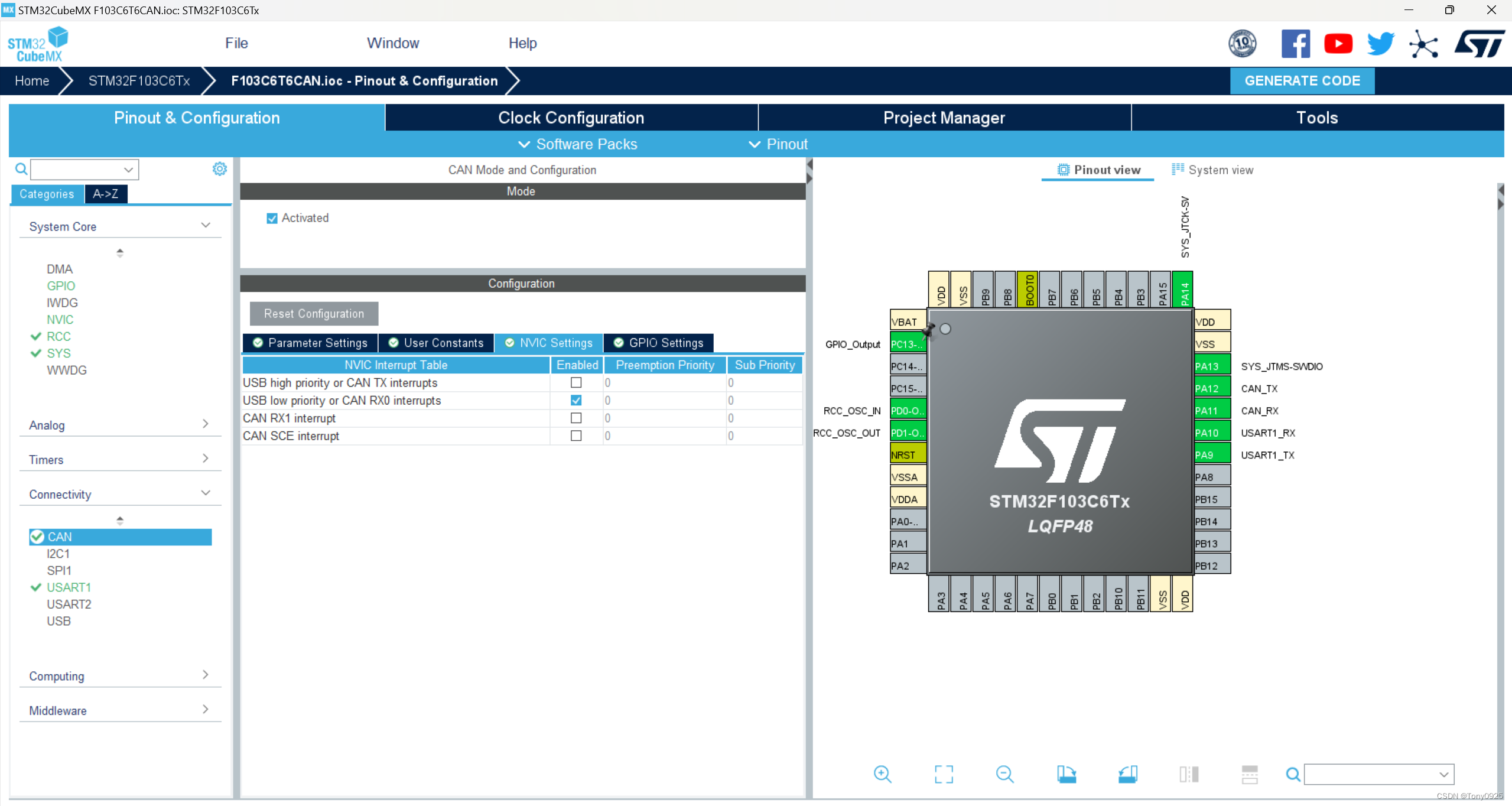
第三步:CAN配置
关键步骤:
- 波特率设置:1M bit/s,具体配置如下图
- TEST MODE - Loopback
- 打开接收中断RX0
四、MDK5配置:
一、can.h头文件配置
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __CAN_H__
#define __CAN_H__#ifdef __cplusplus
extern "C" {
#endif/* Includes ------------------------------------------------------------------*/
#include "main.h"/* USER CODE BEGIN Includes *//* USER CODE END Includes */extern CAN_HandleTypeDef hcan;/* USER CODE BEGIN Private defines *//* USER CODE END Private defines */void MX_CAN_Init(void);/* USER CODE BEGIN Prototypes */
void CANFilter_Config(void);
void CAN1_Send_Test(void);
void CAN_Start_Init(void);
void CAN1_Send(uint8_t* cdata);
/* USER CODE END Prototypes */#ifdef __cplusplus
}
#endif#endif /* __CAN_H__ */二、can.c源文件配置
/* Includes ------------------------------------------------------------------*/
#include "can.h"/* USER CODE BEGIN 0 */
#include "stdio.h"
#include "usart.h"
#include "main.h"
static CAN_TxHeaderTypeDef TxMessage; //CAN发送的消息的消息头
static CAN_RxHeaderTypeDef RxMessage; //CAN接收的消息的消息头
/* USER CODE END 0 */CAN_HandleTypeDef hcan;/* CAN init function */
void MX_CAN_Init(void)
{hcan.Instance = CAN1;hcan.Init.Prescaler = 4;hcan.Init.Mode = CAN_MODE_LOOPBACK;hcan.Init.SyncJumpWidth = CAN_SJW_1TQ;hcan.Init.TimeSeg1 = CAN_BS1_5TQ;hcan.Init.TimeSeg2 = CAN_BS2_3TQ;hcan.Init.TimeTriggeredMode = DISABLE;hcan.Init.AutoBusOff = DISABLE;hcan.Init.AutoWakeUp = DISABLE;hcan.Init.AutoRetransmission = DISABLE;hcan.Init.ReceiveFifoLocked = DISABLE;hcan.Init.TransmitFifoPriority = DISABLE;if (HAL_CAN_Init(&hcan) != HAL_OK){Error_Handler();}/* USER CODE BEGIN CAN_Init 2 *//* USER CODE END CAN_Init 2 */}void HAL_CAN_MspInit(CAN_HandleTypeDef* canHandle)
{GPIO_InitTypeDef GPIO_InitStruct = {0};if(canHandle->Instance==CAN1){/* USER CODE BEGIN CAN1_MspInit 0 *//* USER CODE END CAN1_MspInit 0 *//* CAN1 clock enable */__HAL_RCC_CAN1_CLK_ENABLE();__HAL_RCC_GPIOA_CLK_ENABLE();/**CAN GPIO ConfigurationPA11 ------> CAN_RXPA12 ------> CAN_TX*/GPIO_InitStruct.Pin = GPIO_PIN_11;GPIO_InitStruct.Mode = GPIO_MODE_INPUT;GPIO_InitStruct.Pull = GPIO_NOPULL;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);GPIO_InitStruct.Pin = GPIO_PIN_12;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);/* CAN1 interrupt Init */HAL_NVIC_SetPriority(USB_LP_CAN1_RX0_IRQn, 0, 0);HAL_NVIC_EnableIRQ(USB_LP_CAN1_RX0_IRQn);/* USER CODE BEGIN CAN1_MspInit 1 *//* USER CODE END CAN1_MspInit 1 */}
}void HAL_CAN_MspDeInit(CAN_HandleTypeDef* canHandle)
{if(canHandle->Instance==CAN1){/* USER CODE BEGIN CAN1_MspDeInit 0 *//* USER CODE END CAN1_MspDeInit 0 *//* Peripheral clock disable */__HAL_RCC_CAN1_CLK_DISABLE();/**CAN GPIO ConfigurationPA11 ------> CAN_RXPA12 ------> CAN_TX*/HAL_GPIO_DeInit(GPIOA, GPIO_PIN_11|GPIO_PIN_12);/* CAN1 interrupt Deinit */HAL_NVIC_DisableIRQ(USB_LP_CAN1_RX0_IRQn);/* USER CODE BEGIN CAN1_MspDeInit 1 *//* USER CODE END CAN1_MspDeInit 1 */}
}/* USER CODE BEGIN 1 */
/*******************
接受信息过滤器
*******************/void CANFilter_Config(void)
{CAN_FilterTypeDef sFilterConfig;sFilterConfig.FilterBank = 0; //CAN过滤器编号,范围0-27sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK; //CAN过滤器模式,掩码模式或列表模式sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT; //CAN过滤器尺度,16位或32位sFilterConfig.FilterIdHigh = 0x000 << 5; //32位下,存储要过滤ID的高16位sFilterConfig.FilterIdLow = 0x0000; //32位下,存储要过滤ID的低16位sFilterConfig.FilterMaskIdHigh = 0x0000; //掩码模式下,存储的是掩码sFilterConfig.FilterMaskIdLow = 0x0000;sFilterConfig.FilterFIFOAssignment = 0; //报文通过过滤器的匹配后,存储到哪个FIFOsFilterConfig.FilterActivation = ENABLE; //激活过滤器sFilterConfig.SlaveStartFilterBank = 0;if (HAL_CAN_ConfigFilter(&hcan, &sFilterConfig) != HAL_OK) {Error_Handler();}else{ printf("HAL_CAN_ConfigFilter(&hcan, &sFilterConfig) is HAL_OK\r\n"); }
}
/*******************
中断接受
*******************/
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)
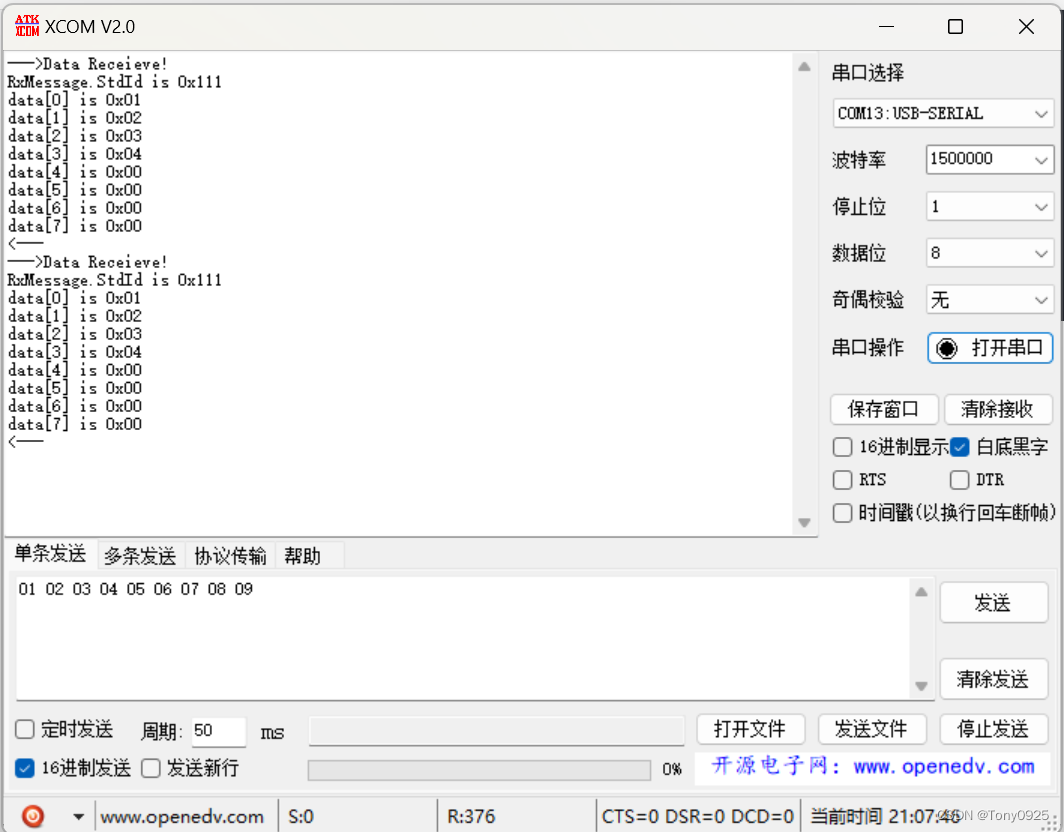
{uint8_t data[8];HAL_StatusTypeDef status;status = HAL_CAN_GetRxMessage(hcan, CAN_RX_FIFO0, &RxMessage, data);if (HAL_OK == status){ printf("--->Data Receieve!\r\n");printf("RxMessage.StdId is %#x\r\n", RxMessage.StdId);printf("data[0] is 0x%02x\r\n", data[0]);printf("data[1] is 0x%02x\r\n", data[1]);printf("data[2] is 0x%02x\r\n", data[2]);printf("data[3] is 0x%02x\r\n", data[3]);printf("data[4] is 0x%02x\r\n", data[4]);printf("data[5] is 0x%02x\r\n", data[5]);printf("data[6] is 0x%02x\r\n", data[6]);printf("data[7] is 0x%02x\r\n", data[7]); printf("<---\r\n"); HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13); }
}/*******************
发送函数
*******************/
void CAN1_Send_Test(void)
{uint32_t TxMailbox;uint8_t data[4] = {0x01, 0x02, 0x03, 0x04};TxMessage.IDE = CAN_ID_STD; //设置ID类型TxMessage.StdId = 0x111; //设置ID号TxMessage.RTR = CAN_RTR_DATA; //设置传送数据帧TxMessage.DLC = 4; //设置数据长度if (HAL_CAN_AddTxMessage(&hcan, &TxMessage, data, &TxMailbox) != HAL_OK){Error_Handler();} // else{ printf("HAL_CAN_AddTxMessage(&hcan, &TxMessage, data, &TxMailbox) is HAL_OK\r\n"); }
}void CAN1_Send(uint8_t* cdata)
{uint32_t TxMailbox;TxMessage.IDE = CAN_ID_STD; //设置ID类型TxMessage.StdId = 0x111; //设置ID号TxMessage.RTR = CAN_RTR_DATA; //设置传送数据帧TxMessage.DLC = 8; //设置数据长度 if (HAL_CAN_AddTxMessage(&hcan, &TxMessage, cdata, &TxMailbox) != HAL_OK){Error_Handler();}
}
/*******************
CAN启动函数
*******************/
void CAN_Start_Init(void)
{if (HAL_CAN_Start(&hcan) != HAL_OK) {Error_Handler();}else{ printf("HAL_CAN_Start(&hcan) is HAL_OK\r\n"); }/* 3. Enable CAN RX Interrupt */if (HAL_CAN_ActivateNotification(&hcan, CAN_IT_RX_FIFO0_MSG_PENDING) != HAL_OK) {Error_Handler();}else{ printf("HAL_CAN_ActivateNotification(&hcan, CAN_IT_RX_FIFO0_MSG_PENDING) is HAL_OK\r\n"); }
}
/* USER CODE END 1 */三、main.c文件配置
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_CAN_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 */CANFilter_Config();CAN_Start_Init();/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){CAN1_Send_Test();HAL_Delay(1000);/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}
四、串口打印结果:
五、本文对应代码分享:
https://download.csdn.net/download/qq_45854134/88522530
这篇关于STM32-HAL库09-CAN通讯(loopback模式)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







