本文主要是介绍TMC2209使用uart和无传感器归位注意事项,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一、uart
1、介绍
我们现在常用的电机驱动,一般都可以设置为uart模式,而tmc2209自然也具有其功能。
2、使用步骤:
1)先进行调节驱动电流,也就是用电压表(设置为2v范围),负表笔接电源负极,正表笔与螺丝刀接触,使用螺丝刀旋转驱动上方的电位器(边旋转边观察电压),直到电压为预期值(比如2209驱动,40mm电机,一般设置为1.136v),预期值具体多少,需要考虑电机高度,电机内阻,电源电压等很多因素
2)驱动电压调节好了之后(达到预期电压),计算驱动电流,驱动购买详情里面一般有介绍计算公式,计算公式中的“V vref”这个变量就是我们上面所说的预期电压,比如我的2209驱动计算公式如下:
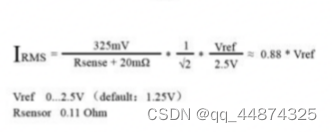
由此可以计算出,预期电压为:1.136v时,电流就是1A,也就是1000mA
3)设置固件中,uart模式下的电流为1000(单位默认为mA)
4)上面说了这么多,感觉和uart没什么关系,确实,uart模式的最大作用就是通过设置参数来设置驱动电流,还有就是感知电流大小(无传感器归位就用到了这个)
5)如何通过参数设置电流大小呢,就是通过参数M913,例如:M913 X10 Y10 ;作用就是设置x与y轴的工作电流为额定电流(上面我们计算得到的电流1000mA)的10%,也就是现在的工作电流为100mA
3、个人经验之谈
uart模式,主要就是的功能就是动态设置驱动电流,具体为什么要这个功能,我也理解不多,但还有重要一点就是,你想使用无传感器归位的功能,必须保证设置了uart模式,并且没有任何问题之后,才能保证无限位归零没有问题。
uart模式,不同厂家的驱动,不同厂家的主板,设置方法都是不一样的,比如我遇到的问题,乐积的2209驱动,他家的驱动,在PDN_UART没有连接,一般的驱动会默认连接4号引脚,而他家的一个引脚都没连,所以需要手动焊接连接如图所示:
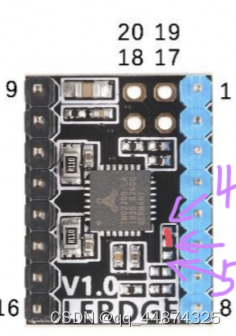
图中红色的短线,就是需要焊接的地方,紫色的箭头和数字,分别对应驱动的4号引脚和5号引脚,具体连接哪一个引脚,看主板型号
提醒:使用uart模式,必须确保驱动的PDN_UART连接了4号引脚或者5号引脚
二、无传感器归位
1、别称:
无限位归零,无传感器归零,等
2、使用步骤
不同的主板,设置的方法都不一样,这里就不介绍了,我使用的主板是fly-cdy_v3的板子,有使用同款板子的玩友们,遇到问题了,可以私信我,不一定在线,看到一定回复
3、个人经验之谈
无传感器归位所用到的引脚是“DIAG”引脚,也仅仅只需要这个引
使用此功能时,需保证驱动上的“DIAG”引脚对应主板上的“DIAG”,那主板上到底哪个引脚对应“DIAG”呢,这个需要你咨询主板厂家或者商家
还有一点就是,无传感器归位的原理就是,通过电机到达原点之后,继续移动,造成电机堵转,电机电流变大,时刻通过uart功能,检测电机电流(驱动内部完成),到达一定电流时,驱动会通过diag引脚–>通知 -->主板,机器到达了原点
这篇关于TMC2209使用uart和无传感器归位注意事项的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







