本文主要是介绍智能编程计算机表演赛,第27届计算机表演赛|智能编程任务赛比赛指南(一)...,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
原标题:第27届计算机表演赛|智能编程任务赛比赛指南(一)

老师们,同学们大家好,小编今天为大家带来了第27届中国儿童青少年威盛中国芯HTC计算机表演赛,智能编程任务赛的第一期比赛指南,本期我们主要来介绍下智能编程任务赛比赛平台,Let's Go !
首先登录网址为我们的官网:http://www.wotime.com.cn/
登录账户后,进入我的比赛,会看到智能编程任务赛。

这里分为比赛和练习两种模式
比赛共有5次机会,上边这里可以看到剩余次数的信息;
练习模式供选手练习使用,没有次数限制
我们今天先来看比赛模式

这里会显示比赛名称、时间、分数、次数信息
点击开始比赛

这就是我们比赛平台的界面啦,可以看到整体分为三个区域。上边为功能区,这有比赛题目,评分/提交,结束比赛选项,以及当前组别和剩余时间的信息,如果后面有得分,还会显示分数信息。

点击比赛题目,大家可以看到当前正在进行的任务信息,也可以从这里变更任务,之后点击OK即可

点击 “评分/提交” 就可以试算当前任务的得分情况。如果答对了,系统会根据当前所用时间自动生成一个分数,用时越少得分越高哟~
如果觉得没有问题就可以确认提交;如果还想继续比赛,也可以点击 “不提交,继续比赛 ”返回比赛界面。
注意:系统的评定标准是程序单次大循环(loop)必须能结束,也就是说系统会从程序第一条运行到最后一条,且只运行一次,选手在做循环题目的时候要注意此项判定机制。
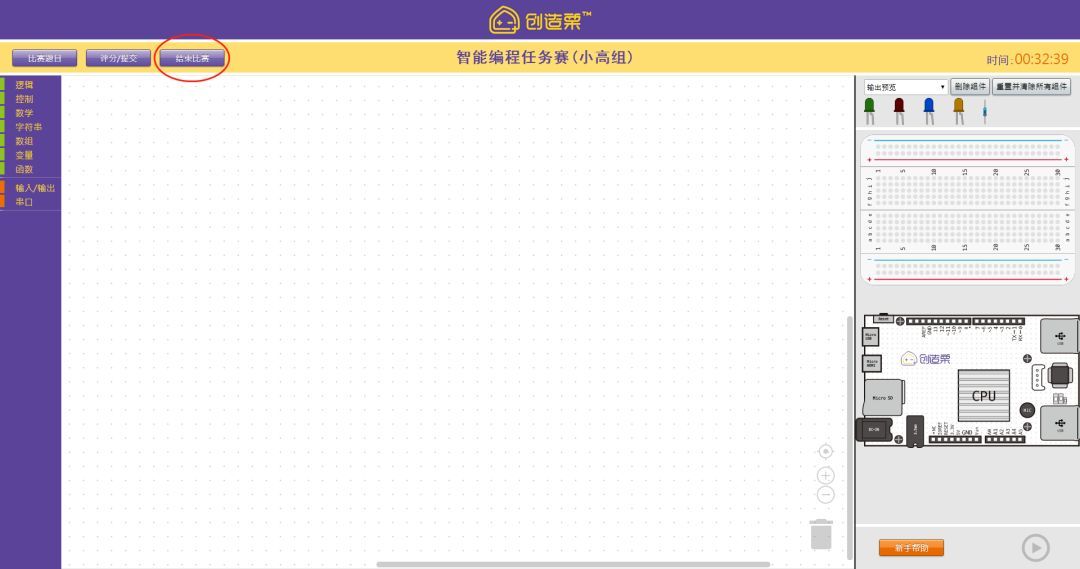
点击结束比赛,会提示当前试算最高分,同样,点击“确认提交”则会提交成绩并结束比赛,点击 “不提交,继续比赛” 返回比赛界面。
如果之前没有进行过评分试算成绩,那么无论当前对与错,系统都会按0分计算,这点需要小伙伴们注意。

时间剩余5分钟系统会有提示,此时应尽快提交分数,避免时间耗尽无法提交。

当时间耗尽,比赛自动结束,如果之前没有提交过成绩,分数为0

左侧的图形化编程模块就和我们之前在线编程软件一样,常用的逻辑、控制、数学等编程模块,直接拖拽需要的编程模块到工作区即可。
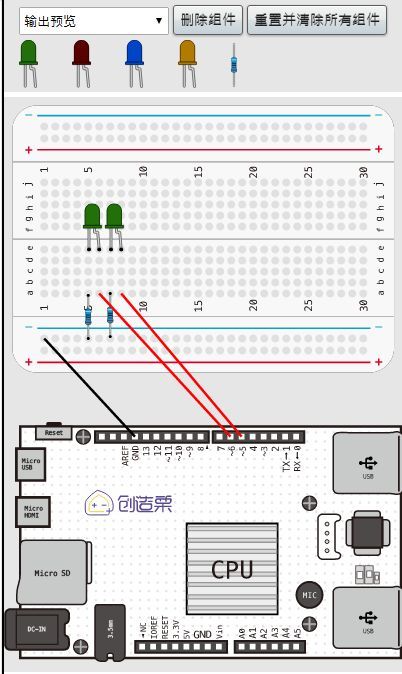
右侧的图形化仿真环境,就是将我们现实中所要用到的器材直接移入比赛平台中,大家可以看到主控板,面包板,LED灯,电阻这些我们必备的硬件器材。
在图形化仿真环境中,我们一样拖拽我们所需要的器材到想要的位置即可;
杜邦线链接方式为单击相应针孔,同时把鼠标拖到我们想要连接的针孔点击即可
(如果需要加电阻的地方没有加,系统会自动判断为错误)
有多余的硬件器材想要移除,先点击相应器材,再点上面删除组件即可移除相应器材;如果想全部清除,直接点击重置并清除所有组件即可。

击上边下拉菜单,选择程序代码,可以看到当前图形化编程模块所对应的代码
点击右侧运行按钮,即可模拟将程序上传到主控板后的运行效果。
最后,智能编程任务赛比赛指南(一)的视频讲解,已在优酷视频同步更新(长按下方链接,进行复制粘贴,移步至优酷视频观看)

http://v.youku.com/v_show/id_XMzM0ODU1NjAwMA==.html
下一期会为大家带来具体案例的教学,敬请期待!
祝大家取得好成绩!返回搜狐,查看更多
责任编辑:
这篇关于智能编程计算机表演赛,第27届计算机表演赛|智能编程任务赛比赛指南(一)...的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






