本文主要是介绍M4 tm4c1294单片机软件调式总结,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
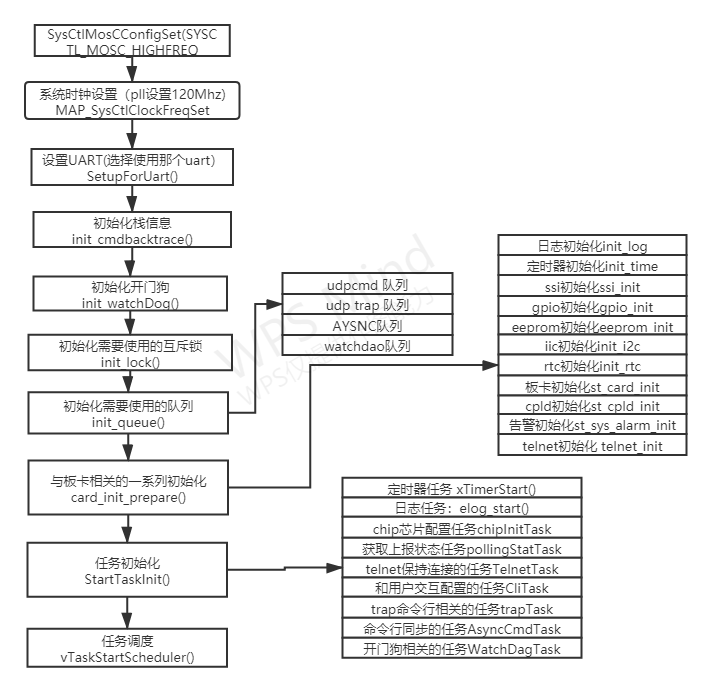
1,框架图:
调式基本方法:
(1)加串口打印初始化,单步跟踪查看,类似gdb的单步;
(2)打印命令行,重点参数添加命令行打印;
(3)打印开关,在任务调度中添加有打印开关的打印帮助函数;
(4)点灯调式初始化,类似单步打印;
怎么确定是硬件问题还是软件问题:
常见硬件问题:
(1)串口无打印;
(2) 访问问题;(iic/spi/mdio访问挂死)
确认总线(iic0/iic1),确认器件地址。
1,芯片和板卡复位/解复位怎么用;
2,看门狗电路的作用和工作原理:
看门狗,又叫 watchdog timer,是一个定时器电路, 一般有一个输入,叫喂狗,一个输出到MCU的RST端,MCU正常工作的时候,每隔一端时间输出一个信号到喂狗端,给 WDT 清零,如果超过规定的时间不喂狗,(一般在程序跑飞时),WDT 定时超过,就回给出一个复位信号到MCU,是MCU复位. 防止MCU死机. 看门狗的作用就是防止程序发生死循环,或者说程序跑飞。
工作原理:在系统运行以后也就启动了看门狗的计数器,看门狗就开始自动计数,如果到了一定的时间还不去清看门狗,那么看门狗计数器就会溢出从而引起看门狗中断,造成系统复位。所以在使用有看门狗的芯片时要注意清看门狗。
3,什么时候使用互斥锁?
iic访问,iic-0同时访问温度和光模块以及其他芯片时;
这篇关于M4 tm4c1294单片机软件调式总结的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




