本文主要是介绍通过NCNN在树莓派上部署Fastest YOLO,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
前言:
最近一直在用树莓派做深度学习方面的模型部署,从最开始的直接移植官方的yolov5模型,到自己精简模型结构压缩参数再放到树莓派上跑,最后的结果总是能跑但FPS过于低,跑个图片还能接受,但是跑实时摄像头就尤其慢。
在重重受挫后,开始考虑用各种架构。最开始是用Intel的Openvino去做,但是一是部署和安装环境的过程极其艰难,其次是缺少英特尔神经棒的硬件支持,半道崩阻了。不过好在在知乎上看到了dog-qiuqiu的Fastest YOLO,大佬说该模型在树莓派上能跑到100多帧。大喜,明确结果且可行性较高,遂在磕磕碰碰中跑出了结果并且总结了许多经验,写下这篇博客以备自己后续参考。
一、系统烧录
环境:windows11、树莓派4b(8g)
1.树莓派64位镜像源:百度网盘链接:点我 提取码:k9r9
注意:这里安装的是Raspbian-64位系统,我尝试过ubuntu的系统,最后效果不是很好(而且确实在树莓派上跑ubuntu有点点卡顿),最主要的是ubuntu的话就不好用VNC Viewer来控制树莓派,那就有点得不偿失了。(VNC Viewer是真的很好用!!)
2.烧录工具:win32DiskImager
烧录的过程就很容易了在这里不演示。
3.VNC Viewer远程控制树莓派
1)首先在电脑端安装VNC Viewer:官网直接下载

windows用户直接点击中间的Download即可。下载后直接安装,安装在任意一个盘都行。
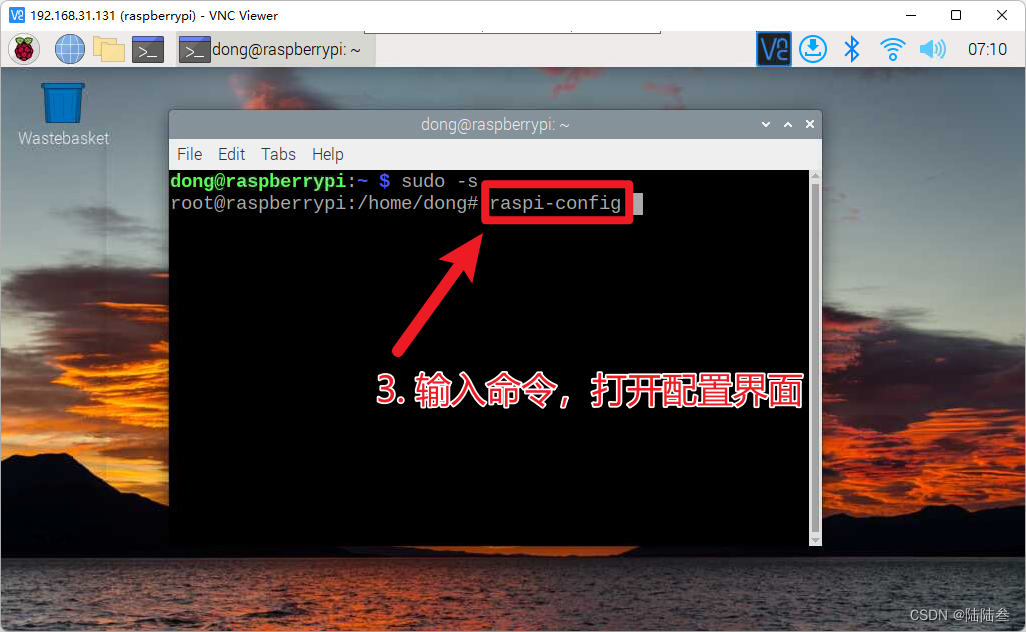
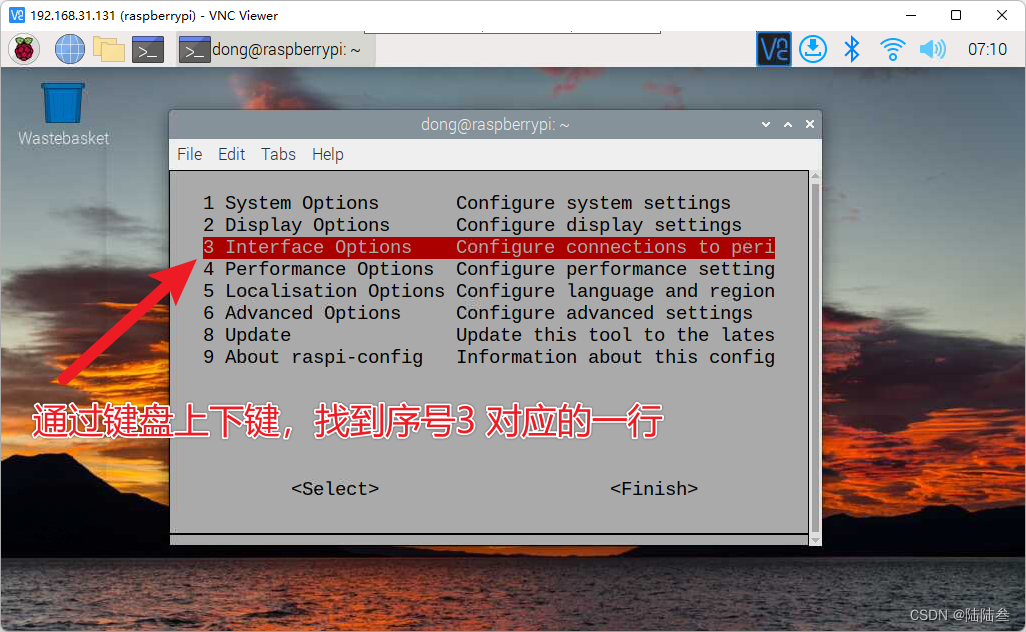
2)配制树莓派打开VNC功能:






然后关闭界面即可,现在已经开启了树莓派的vnc功能了。然后因为我用的是wifi,树莓派ip地址不怎么变动,即使变动了也很方便查看: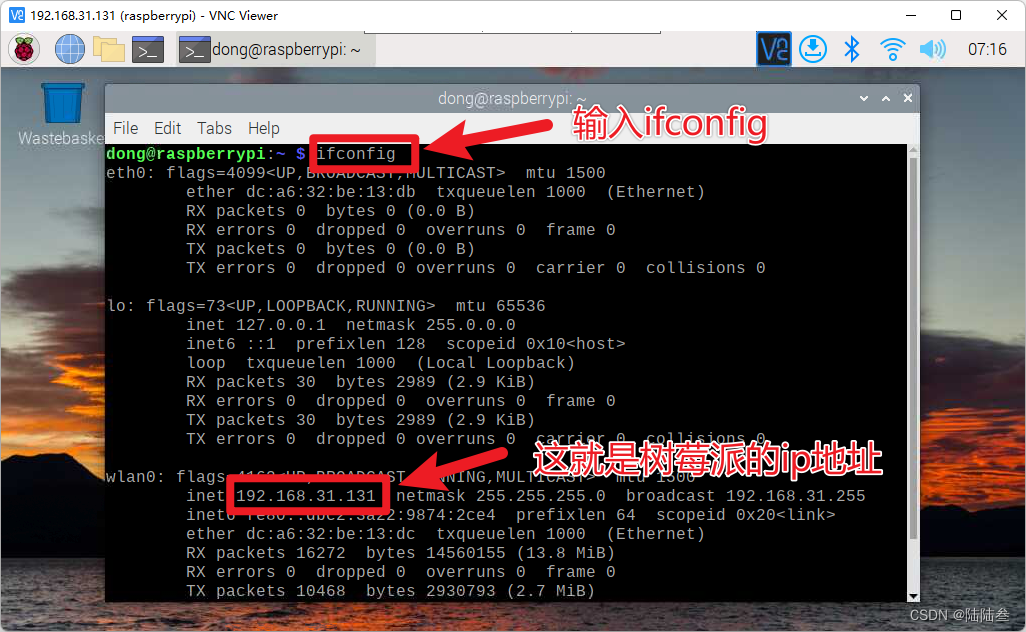
或者直接将鼠标移动到树莓派桌面的右上角wifi图标处,停留几秒就会显示出IP地址。
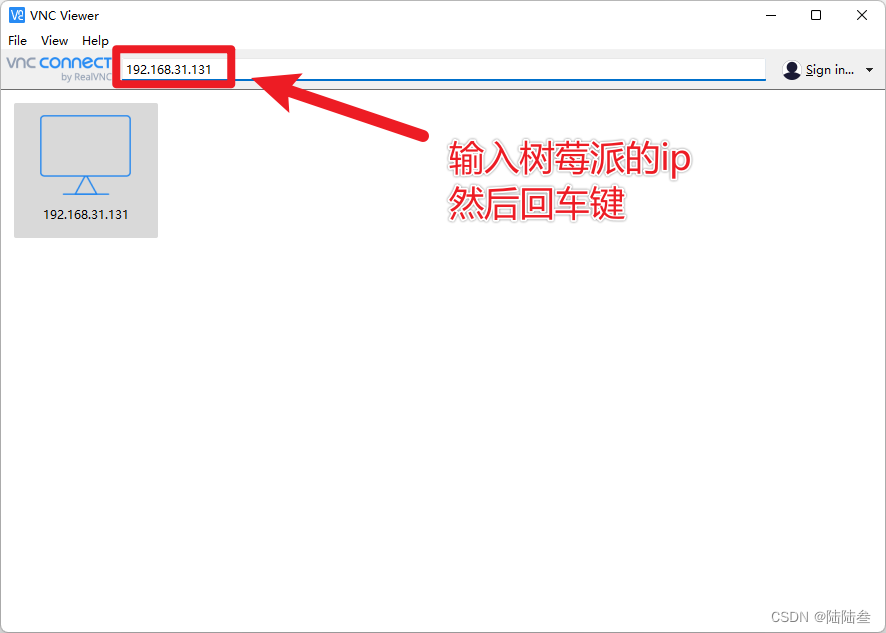
3)远程控制
打开电脑端的VNC Viewer,第一次打开直接点击下方不注册用户 直接使用软件的按钮。然后:
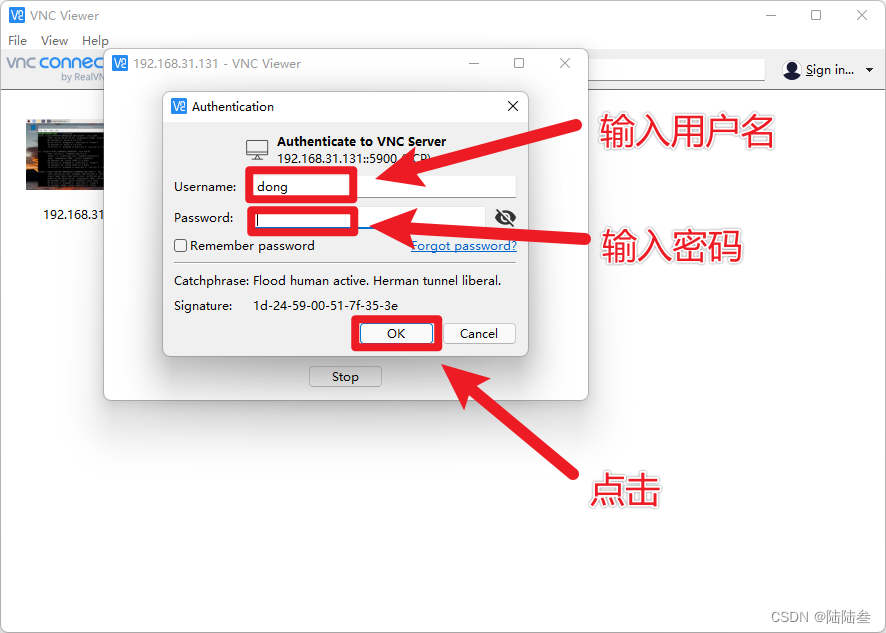
然后就能在自己的电脑上远程控制树莓派了,这种方法较为简单,而且上方还有文件传输功能,甚至能支持鼠标在树莓派和电脑之间右键复制粘贴,可谓非常好用!
二、安装OpenCV
截止到文章写作日期(2023.7.2),树莓派64位系统安装OpenCV的流程已经算是非常容易。(之前走过太多太多的弯路,试过无数种方法,都没成功,这次总算摸索出了自己的一套方法)
步骤一:
#先安装opencv
pip install opencv-python -i https://pypi.tuna.tsinghua.edu.cn/simple#再更新numpy
pip install numpy --upgrade -i https://pypi.tuna.tsinghua.edu.cn/simple#以防万一,再安装一下libopencv-dev
sudo apt install libopencv-dev步骤二:
#创建opencv.pc文件
cd /usr/local/lib
sudo mkdir pkgconfig
cd pkgconfig
sudo touch opencv.pc然后在opencv.pc中添加以下信息,注意这些信息需要与我们安装opencv时的库路径对应,我的是这样:
#先查看一下我们下载的opencv的版本号,直接在终端中输入:python,然后回车
import cv2 #回车
cv2.__version__ #回车后就能看到对应的版本号,我下载的版本号是4.8.0#再用nano打开opencv.pc
sudo nano opencv.pc#按下ctrl+O,回车确定后,写入以下信息:注意要改版本号
prefix=/usr/local
exec_prefix=${prefix}
includedir=${prefix}/include
libdir=${exec_prefix}/libName: opencv
Description: The opencv library
Version:4.8.0
Cflags: -I${includedir}/opencv4
Libs: -L${libdir} -lopencv_shape -lopencv_stitching -lopencv_objdetect -lopencv_superres -lopencv_videostab -lopencv_calib3d -lopencv_features2d -lopencv_highgui -lopencv_videoio -lopencv_imgcodecs -lopencv_video -lopencv_photo -lopencv_ml -lopencv_imgproc -lopencv_flann -lopencv_core
~#再按ctrl+s保存,ctrl+x退出编辑
#然后将文件导入到环境变量:
export PKG_CONFIG_PATH=/usr/local/lib/pkgconfig步骤三:
在opencv版本更新后,可以去usr/include文件夹中,找到opencv4,点进去才是opencv2,所以头文件的路径中多了一个opencv4的文件夹,我们要将opencv2的文件夹也链接到include文件夹下:
sudo ln -s /usr/include/opencv4/opencv2 /usr/include/至此,opencv才算成功安装好。
三、编译NCNN
1.安装依赖
sudo apt-get install -y gfortran
sudo apt-get install -y libprotobuf-dev libleveldb-dev libsnappy-dev libopencv-dev libhdf5-serial-dev protobuf-compiler
sudo apt-get install --no-install-recommends libboost-all-dev
sudo apt-get install -y libgflags-dev libgoogle-glog-dev liblmdb-dev libatlas-base-dev
2.下载NCNN
git clone https://github.com/Tencent/ncnn3.编译
#先下载cmake
sudo apt install cmake#再编译ncnn
cd ncnn
mkdir build
cd build
cmake ../
make -j4
make install 编译结束后在build目录下会出现三个文件夹:examples、install、tools,至此ncnn编译成功。
四、模型转化与测试
1.模型及权重的获取
首先从官网获得Fastest YOLO的源代码:网址链接
在自己的电脑上自己创建模型训练任务,获取权重文件,这里不上传我自己跑的模型权重,不过为了演示效果,就引用其他作者分享的权重:百度网盘链接 提取码:ogm4
下载后就能获得yolo-fastest-xl.cfg和yolo-fastest-xlweights这两个文件。
2.权重文件的转化
1)在之前下载好的ncnn文件夹中新建一个Model文件夹,将yolo-fastest-xl.cfg和yolo-fastest-xl.weights文件拷贝到该Model文件夹中。直接用cp命令也可以。
2)cd到ncnn/build/tools/darknet文件下,输入:
#将模型权重转化为param和bin文件
./darknet2ncnn ../../../Model/yolo-fastest-xl.cfg ../../../Model/yolo-fastest-xl.weights ../../../Model/yolo-fastest-xl.param ../../../Model/yolo-fastest-xl.bin3)再将yolo-fastest-xl.param和yolo-fastest-xl.bin文件拷贝到ncnn/build/tools中,并且cd到该目录下,输入:
#即用ncnnoptimize优化,后面的数字代表:0指的的是fp32,1指的是fp16
./ncnnoptimize yolo-fastest-xl.param yolo-fastest-xl.bin new.param new.bin 14)在树莓派中同样下载一份Fastest YOLO的源代码,将new.param和new.bin复制到Yolo-Fastest-master/sample/ncnn/model目录下
5)将ncnn/build/install文件夹下的三个文件夹:bin、include、lib都复制到Yolo-Fastest-master/sample/ncnn下,如下图:
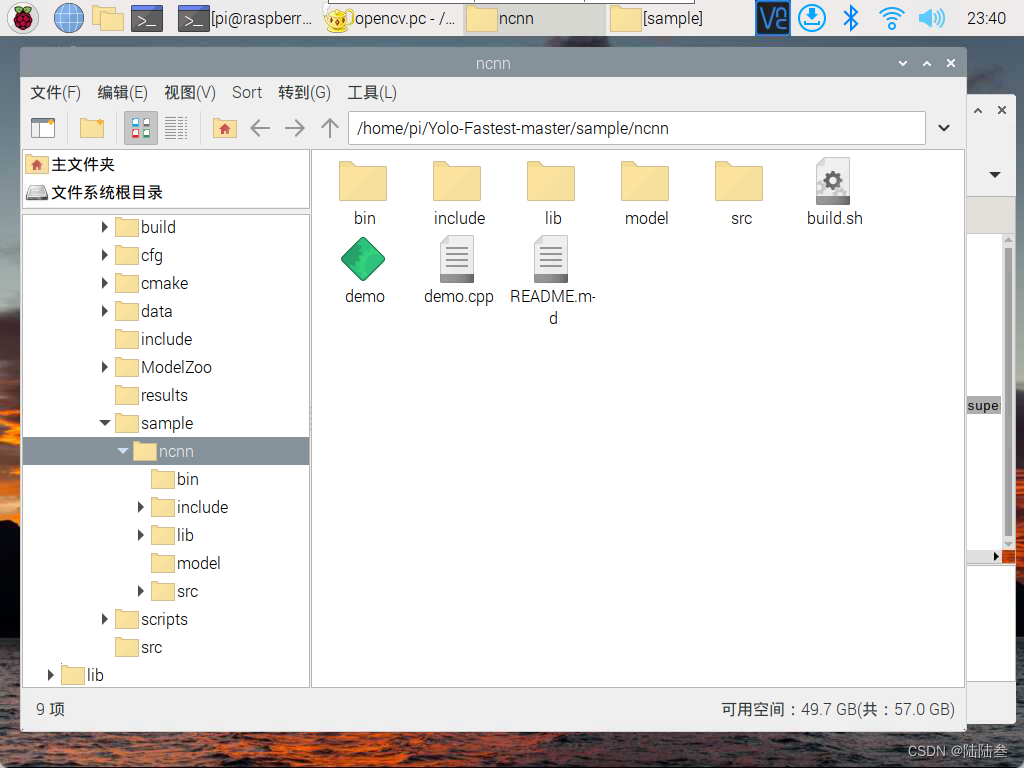
此时,除了demo文件需要我们之后生成外,应该总共有8个文件。
6)修改demo.cpp文件
首先在头文件中加上:
#include "opencv2/imgproc/imgproc_c.h"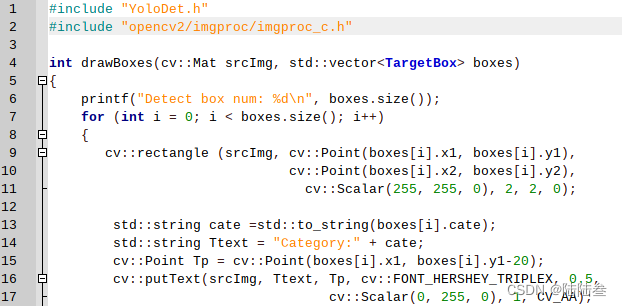
再修改testCam()为:
int testCam() {YoloDet api;//Init modelapi.init("model/new.param", "model/new.bin");7)运行demo文件
在Yolo-Fastest-master/sample/ncnn件夹下打开终端,输入:
sh build.sh然后等待一会儿就会出现上面那个绿色的demo文件,在终端中输入:
./demo就能把程序运行起来,至此一个完整的流程就做完了。
8)最后还有一个线程的优化:
修改F:\cha\Yolo-Fastest-master\sample\ncnn\src文件夹下的YoloDet.cpp和include文件夹里的YoloDet.h这两个文件(这里参考生命不息,学习不止大佬 的方法):


这样就成功用NCNN在树莓派上部署了Fastest YOLO模型了。
这篇关于通过NCNN在树莓派上部署Fastest YOLO的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








