本文主要是介绍农用六旋翼无人机结构设计,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1 绪论... 1
1.1 多旋翼无人机发展简史... 1
1.2 农用多旋翼无人机的背景及意义... 3
1.3 国内外研究现状分析... 3
1.3.1 国外研究现状分析... 3
1.3.2 国内研究现状分析... 4
2 六旋翼植保无人机整体结构设计... 6
2.1 六旋翼无人机整体布局的要求... 6
2.2 六旋翼植保无人机的自平衡原理... 6
2.3 六旋翼植保无人机基本结构设计... 9
2.4 六旋翼植保无人机机身机架连接方式... 11
2.5 六旋翼植保无人机喷洒结构设计... 12
2.6 六旋翼植保无人机药箱结构设计... 14
2.7 本章小结... 15
3 六旋翼植保无人机的硬件系统设计... 16
3.1 动力系统基本组成... 16
3.1.1 电池... 16
3.1.2 电机... 17
3.1.3 电调... 20
3.1.4 螺旋浆... 22
3.2 无人机硬件系统设计... 24
3.2.1 飞行控制器... 25
3.2.2 高度传感器... 25
3.2.3 加速度计、陀螺仪、磁力计... 26
3.2.4 液位计... 28
3.3 本章小结... 29
4 六旋翼植保无人机机臂仿真分析... 30
4.1 仿真软件介绍 30
1 绪论... 1
1.1 多旋翼无人机发展简史... 1
1.2 农用多旋翼无人机的背景及意义... 3
1.3 国内外研究现状分析... 3
1.3.1 国外研究现状分析... 3
1.3.2 国内研究现状分析... 4
2 六旋翼植保无人机整体结构设计... 6
2.1 六旋翼无人机整体布局的要求... 6
2.2 六旋翼植保无人机的自平衡原理... 6
2.3 六旋翼植保无人机基本结构设计... 9
2.4 六旋翼植保无人机机身机架连接方式... 11
2.5 六旋翼植保无人机喷洒结构设计... 12
2.6 六旋翼植保无人机药箱结构设计... 14
2.7 本章小结... 15
3 六旋翼植保无人机的硬件系统设计... 16
3.1 动力系统基本组成... 16
3.1.1 电池... 16
3.1.2 电机... 17
3.1.3 电调... 20
3.1.4 螺旋浆... 22
3.2 无人机硬件系统设计... 24
3.2.1 飞行控制器... 25
3.2.2 高度传感器... 25
3.2.3 加速度计、陀螺仪、磁力计... 26
3.2.4 液位计... 28
3.3 本章小结... 29
4 六旋翼植保无人机机臂仿真分析... 30
4.1 仿真软件介绍... 30
4.2 机身材料的赋予... 30
4.3 机臂静力学分析... 30
4.3.1 前处理... 30
4.3.2 求解... 31
4.3.3 后处理... 31
4.4 机臂模态分析... 32
4.5 本章小结... 34
5 六旋翼植保无人机的可行性分析与保养... 35
5.1 无人机可行性分析... 35
5.2 无人机经济性分析... 35
5.2.1 机械结构经济性分析... 35
5.2.2 无人机材料选择的经济性... 35
5.3 最终成本明细表... 36
5.4 六旋翼植保无人机的保养... 36
5.4.1 六旋翼植保无人机的日常保养... 36
5.4.2 六旋翼植保无人机使用前的保养... 37
5.4.3 六旋翼无人机使用后的保养... 37
5.5 本章小结... 38
参考文献... 39
多旋翼无人机的发展大致可分为四个阶段:沉寂期、复苏期、起步期以及复兴期。
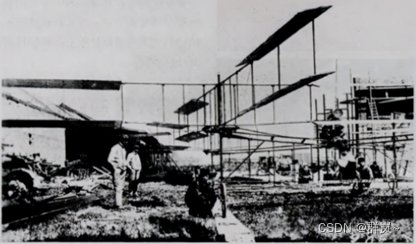
多旋翼无人机的历史最早可以追溯到1907年,法国的Breguet兄弟在其老师的指导帮助之下发明了如图 1.1所示的世界上第一台多旋翼无人机,并完成了首次飞行,这是被后人记录的最早的多旋翼无人机。但是它最大的飞行高度只有1.5m,然后便掉到了地上[1]。
后来在1920年,来自法国的工程师Étienne Oehmichen就准备设计一架更适合自己的多旋翼无人机,不过虽然他所设计的无人机首次尝试就以失败告终,可是在通过了他的重新修改设计以后,这款多旋翼无人机就顺利升空,并进行了长达十四分钟的高空试飞。1921年,美籍俄裔人士乔治·德·博泽扎蒂受美国空军委派,设计并制造了一款大型无人机。该无人机配备四只螺旋桨,原本设计飞行高度在100米左右,但实际高度仅达5米。后期经过检查原因,发现是发动机质量不好。1950年前后,美国陆军部队开始试验各种垂直起落系统,并与Curtiss-Wright公司等多家企业合作研制了一种如图 1.2所示的飞行吉普,该种飞行吉普的基本飞行原理是通过木杠燃气涡轮机转动来提升飞机的性能,通过不断改进,该款飞行吉普的第七代型号于1960年前后进行了相对平稳的试飞。但比较遗憾的是这款飞行吉普的各项指标参数均始终未能达到陆军军方的要求,最终也被放弃[2]。此后,多旋翼无人机发展缓慢,并且三十多年里多旋翼无人机技术都没有任何大的突出。

多旋翼无人机自从1990年前后出现多旋翼无人机玩具后,再次引起公众的关注[3]。当时,微机电系统的惯性导航系统由于其重量轻,仅几克重,因此很符合多旋翼无人机配件的要求,因此惯性导航系统也开始应用于多旋翼无人机,以实现更稳定的飞行。上世纪90年代初,Keyence Gryo Saucer II E-570开始在日本市场上出现。同时,美国工程师M. Dammar发明了一款名为Roswell Flyer的四旋翼,该机使用电池作为动力源。
尽管法国Parrot公司于2004年才开始研发消费级多旋翼无人机,但仅仅6年后,该公司成功开发出AR.Drone四旋翼无人机,开创了多旋翼无人机消费级市场时代。2012年,国内大疆公司推出了Phantom,一款用户仅需进行简单配置即可航拍的多旋翼航拍无人机,使多旋翼无人机技术进入了大众领域。该款无人机在出厂前已经完成了安装和调试,让大疆公司声名迅速崛起。随后,国内的消费级无人机制造商零度、亿航和极飞也崭露头角。之后,多旋翼无人机的研发和制造中心逐渐向国内转移[4]。
2014年11月,大疆推出了Inspire1,集成了高清数字图传、4K云台相机、独立云台控制等技术。此后,大疆将Inspire1的技术应用到Phantom系列上。同时,其它中国无人机企业逐渐退出竞争。2015年,极飞进军无人机农业植保领域;2016年9月27日,大疆推出了市场上首款消费级折叠无人机MavicPro,此后,其它无人机厂商也开始研发各种款式的折叠无人机。
零度研发的VTOL复合固定翼无人机和高倍率视觉追踪功能的光电吊舱,已经慢慢的在无人驾驶飞行领域中重新夺回了地位,不过在消费型的无人驾驶飞机方面,则还保持着技术授权;而极飞公司也在此时已经成了中国国内农业植保领域的龙头[5];大疆公司也研发了M200系列无人机,主要应用于电力巡检、救援和安防巡逻等领域,并且还有如风系列大载重无人机,主要应用于物流和特勤领域。
随着科技的不断发展,多旋翼无人机的一些关键性的技术难题有望逐步得以解决。未来,多旋翼无人机将进一步实现智能化、规范化和专业化,成为各个领域不可或缺的重要角色。
随着科技的飞速发展,“现代农业”越来越被大众所接受,现代农业是在现代工业和现代科学技术基础上发展起来的农业,它是现代产业体系的基础[6]。
由此,我国对于农业方面的发展要求也在不断更新,整体趋势向着更加精准的方向发展。相较于之前的农业植保方式,不仅作业效率低,而且由于人工作业或者人工操作喷雾机器作业会导致农药喷洒不均匀,喷洒多的区域农药的残余量就会偏高,这些问题对于目前的社会的农业发展已经亟待解决。所以,研究一种新的农业植保方式已经成为必要的发展趋势[7],而植保无人机作为一种新的植保方式活跃于中国农业植保领域。
植保无人机可搭载农药,在农田上空完成低空飞行和农药喷洒,每分钟可完成约一亩地的喷洒任务,相比人工喷洒,其喷洒效率可提高30倍。我国在世界上的定位一直处于农业大国,据统计,国内每年的种植面积约为1.2亿hm2,拥有大量的农田植保任务,因此,我国的植保无人机发展空间相对较大[8]。
从世界的角度来看,美国有固定翼飞机,并且是有人驾驶的;日本有植保无人机,并且是利用油来提供无人机所需动力。除此之外,澳大利亚、俄罗斯、巴西、加拿大、韩国等国家在无人机植保技术方面也取得了很高的发展水平[9]。这些国家在无人机结构创新、系统智能化以及植保技术手段方面都非常领先。我国的植保无人机可以从这些国家的经验中汲取许多启示。
最早在1987年,日本就研制出了无人机,并且主要机型是利用油的燃烧提供动力的单旋翼机型,但他们无论在发动机技术,还是植保作业管理等方面均已经相当成熟,在国际上处于领先地位。植保无人机在日本的数量从1990年的106台发展到2016年的3045台,植保无人机对水稻的作业面积从1995年的约15万亩次发展到2016年的1562.6万亩次,发展很快[10]。
美国是最早进入大农业时代的国家,并且无人机农业植保技术在世界上也是处于遥遥领先,但他们用来植保作业的飞行仍然是以有人驾驶固定翼飞机为主,并且他们用来植保作业的飞机都搭载了根据提前设置好的路线自主作业、GPS全球定位、自动控制施药等操作系统,能够做到精准植保、高效喷洒,并且能把对环境的污染控制到最小。但考虑到操作人员的安全的原因,无人机植保作业在美国没有得到应用,但有试验研究[11]。
我们国家的植保无人机的发展相对比较晚,直到2010年,国内才首次出现第一架商用农业植保无人机,并且该无人机还是油动单旋翼,并且在此后的三年里,植保无人机领域也是发展缓慢[12],企业数量也没有增加。但是后期发展速度很快,尤其是近几年,其发展趋势一度赶超国外。在2012年的“中央一号”文件中,明确了国家政策要大力帮助“加强农业航空建设”。此后,国内的一些投资企业开始在植保无人机领域投资研发生产[13]。据统计,仅仅2012年中央一号文件发布后的两年里,随着一些地方政府对中央一号文件的落实,先后推出一系列关于植保无人机的补贴政策,进一步促进了植保无人机的销售和一些植保无人机企业的诞生[14]。
目前,我国植保无人机的发展已经进入了蓬勃发展的阶段。随着植保无人机市场的不断扩大,国内的植保无人机制造业已经逐渐占据了全球市场的主导地位。在植保无人机的总数量和使用面积方面,国内已经取得了国际领先地位,并且正在逐步成为世界上最重要的植保无人机技术代表。总体来讲,国内的植保无人机发展表现出以下特点:一是研发生产植保无人机的企业数量连年逐步上升。截止目前,国内涌现出的大概50家左右企业都在进行农用植保方向无人机的研发和生产,并且都有各自独立的销售和供应链,总体态势呈现增长趋势。二是大部分机型主要还是多旋翼,且动力源来自机身携带的电池。植保无人飞机按照动力可分为油动和电动型,按照旋翼数量主要分为单旋翼和多旋翼,其中油动型主要是单旋翼,电动型主要使用的是多旋翼无人机[15],但也有少部分单旋翼无人机。三是技术逐步成熟。现行市面上的植保无人机大部分都可以全自主飞行作业或者可以手动增加飞行作业稳定性;可以进行高度精确定位,并完成了喷射面积和被喷洒对象冠面之间的完整衔接;而是用了超声波检测距离得技术,使植保无人飞行器已经能够超低空贴地飞行,可低至被喷洒对象冠层上零点五米左右处。四是使用场景大且应用效益好。目前保有量已突破3万台,2018年作业面积约2.67亿亩次,重点防控的粮食作物包括水稻、小麦玉米等。五是进行云系统监管。新的《轻小型无人机运行规定》(AC-91-FS-2015-31)要求进行云端监管,将包括农业植保无人飞行器在内的无人机运行活动纳入监管范围。云端监管技术可以实现商业飞行、天气服务等的高效提供,同时对无人机的运营数据进行实时监控,进一步保障无人机的安全运行。
目前国内的主要植保喷洒方式还是以人工使用的喷雾器和比较笨重的农业机械来完成。但是类似玉米等高秆作物,在其幼期还可以人工喷洒农药,但是成熟期之后秸秆较高,人背负喷洒设备在玉米农田里穿梭不便,大型设备也不能使用。还有类似于水稻等在水田里种植的作物也不能够使用农机设备进行喷洒[16]。我国的类型众多。但是北方大多数是平原,并且没有水田,比较适合用大型农机设备来进行植保作业。但是像南方的丘陵地势,云贵川地区的山西和长江中下游的平原水田等,不能采用大型农用机械设备,虽然可以采用人工喷洒的方式,但是人工喷洒效率低下,并且作业质量较低,劳动力成本和农药又高。因此,寻找一种新的高效且适用的农业植保方式非常有必要。
在设计六旋翼植保无人机的总体布局时,必须全面考虑各方面的要求和影响,以防止出现返工的情况。整体布局的主要要求如下[17]。
- 重心定位要求
六旋翼无人机的重心应该尽量在机身的中心对称点,重心位置得偏移会让无人机得飞行过程中出现机身不稳定等问题,因此,无人机的重心位置必须符合要求,应该在重心定位允许的范围内变化,并且留有一定的余地。
- 空气动力要求
多旋翼无人机的外形对其飞行和操作性能有很大的关系,因此在进行整体设计时,应尽量符合气动布局的原则,以减小无人机飞行过程中的气动阻力,从而达到更好的操纵性和稳定性。
- 可靠性、维修性和保障性要求
在满足使用要求的前提下,六旋翼无人机结构应该尽量简单,质量应该尽量轻;此外,无人机上使用的零部件尽量使用标准间或者通用件,这样方便后期维修和更换配件。
- 刚度、强度、最小总量要求
在满足刚度、强度规范的前提下,应该尽量采用硬度大,密度小,即质量轻的材料来制作无人机零部件,以提高无人机的重力效率。
- 工艺要求和成本要求
六旋翼植保无人机的零部件设计应该尽量形状简单,机加工件应符合机加工工艺规范;此外,尽量减少零部件的种类,可以有效提高无人机零部件的互换行和节约无人机制作的成本。
多旋翼无人机是通过改变旋翼的转速来改变姿态。六旋翼无人机由六个执行器组成,它们之间的间隔为60°,与四旋翼无人机、三旋翼无人机相比,他们具有更好的稳定性。
以四旋翼无人机为例,如图 2.1所示,当无人机处于水平状态时,若飞机四个螺旋桨所产生的力f0、f1、f2、f3的总和等于其自身重力时,飞机就能够悬停在空中。这是因为螺旋桨的拉力方向总是垂直于机身平面,在无姿态转移时,无人机能够保持水平状态[18]。
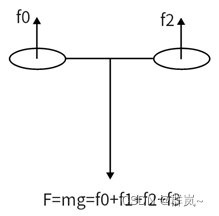
图 2.1 无人机水平状态受力图
当左右两个螺旋桨提供的拉力不相同时,导致无人机产生一个力矩,这个力矩以无人机的中心点为转动轴,以螺旋桨的位置为受力点。在这种力矩的作用下,无人机会发生滚转运动,即向左侧上升、向右侧下降,所有导致机身围绕其中心点进行旋转,如图 2.2所示。
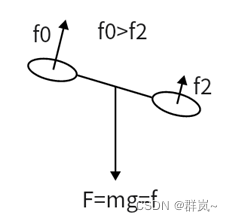
图 2.2 无人机滚转状态受力图
在浆拉力f1和f3不变的情况下,假设f0变大而f2变小,且它们的变量相等。在不考虑俯仰的情况下,飞机的受力如图 2.3所示。此时,可以将f0、f1、f2和f3合并为一个总的垂直于机身的拉力,总大小不变,仍等于机身重力。
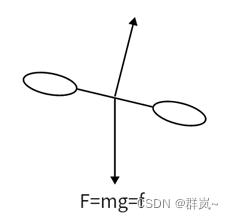
图 2.3 f0、f2改变之后的受力图
因此,无人机的总受力为f。但是,尽管拉力f在数值上等于重力F,但其方向不同。惯性系中,f可以分解为垂直和水平两个方向的力,如图 2.4所示。
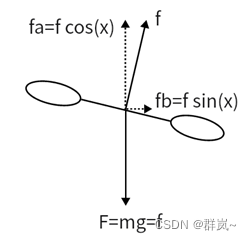
图 2.4 无人机整体受力图
很明显,水平力fb会使飞机产生向右的加速度,其大小为a = fb / m,其中m为飞机质量。而垂直方向上,由于fa小于重力F,因此飞机将会垂直向下加速运动,这个时候无人机的加速度大小为:
a = ( fa - F) / m (式 2.1)
如图 2.5所示,把无人机的六个电机按照逆时针顺序依次编号为1到6,则编号为1、3、5的电机逆时针旋转,搭配的螺旋桨为正浆;编号为2、4、6的电机顺时针旋转,则搭配的螺旋桨为反浆。两组螺旋桨不同的转向抵消了由螺旋桨自身转动所产生的扭矩,只保留了螺旋桨提供的升力。
假设6个电机所产生的拉力依次为F1、F2、F3、F4、F5、F6。编号1、3、5电机顺时针旋转,其余则逆时针旋转,那么电机与无人机动作关系对应如表 2.1所示。

完整资料包,企鹅:1102659292。
这篇关于农用六旋翼无人机结构设计的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!