本文主要是介绍【优秀课设】基于stm32f407ze的蜂鸣器音乐(生日快乐、In The End)、PWM呼吸灯及串口通信系统,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
【优秀课设】基于stm32f407ze的蜂鸣器音乐(生日快乐、In The End)、PWM呼吸灯及串口通信系统
文章目录
- STM32
- Cortex-M架构SysTick系统定时器阻塞和非阻塞延时
- 附录:Cortex-M架构的SysTick系统定时器精准延时和MCU位带操作
- SysTick系统定时器精准延时
- 延时函数
- 阻塞延时
- 非阻塞延时
- 位带操作
- 位带代码
- 位带宏定义
- 总线函数
- 一、位带操作理论及实践
- 二、如何判断MCU的外设是否支持位带
STM32
直接上代码:
# include "stm32f4xx.h"
# include "GPIO.h"
# include "DELAY.h"
# include "GPIO_BUS.h"
static uint16_t tim13_period=0;
//串口初始化函数
void init_USART1(unsigned int Baud)
{//定义GPIO结构体GPIO_InitTypeDef GPIO_KEEY_InitStruct;//使能GPIOF时钟RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);//初始化结构体GPIO_KEEY_InitStruct.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //定义引脚GPIO_KEEY_InitStruct.GPIO_Mode = GPIO_Mode_AF; //定义输出模式GPIO_KEEY_InitStruct.GPIO_Speed = GPIO_Speed_100MHz; //定义速度GPIO_KEEY_InitStruct.GPIO_OType = GPIO_OType_PP; //定义推挽输出GPIO_KEEY_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL; //定义是否有上下拉电阻 普通//将结构体给GPIOF组GPIO_Init(GPIOA,&GPIO_KEEY_InitStruct);GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_USART1); //复用功能GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_USART1); //复用功能USART_InitTypeDef USART_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);//配置串口USART_InitStructure.USART_BaudRate = Baud; //波特率USART_InitStructure.USART_WordLength = USART_WordLength_8b; //8位数据位USART_InitStructure.USART_StopBits = USART_StopBits_1; //1个停止位USART_InitStructure.USART_Parity = USART_Parity_No; //无校验位USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件流控制USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //支持收发数据USART_Init(USART1, &USART_InitStructure);//中断方式USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //使能RX//中断优先级NVIC_InitTypeDef NVIC_InitStructure;/* Enable the USARTx Interrupt */NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);//使能串口USART_Cmd(USART1, ENABLE);
}
//蜂鸣器初始化
void init_BEEP(void)
{//定义GPIO结构体GPIO_InitTypeDef GPIOF_BEEP_InitStruct;//使能GPIOF时钟RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);//初始化结构体GPIOF_BEEP_InitStruct.GPIO_Pin = GPIO_Pin_8; //定义引脚GPIOF_BEEP_InitStruct.GPIO_Mode = GPIO_Mode_OUT; //定义输出模式GPIOF_BEEP_InitStruct.GPIO_Speed = GPIO_Speed_100MHz; //定义速度GPIOF_BEEP_InitStruct.GPIO_OType = GPIO_OType_PP; //定义推挽输出GPIOF_BEEP_InitStruct.GPIO_PuPd = GPIO_PuPd_DOWN; //定义是否有上下拉电阻 普通//将结构体给GPIOF组GPIO_Init(GPIOF,&GPIOF_BEEP_InitStruct);
}void init_KEEY(void)
{//定义GPIO结构体GPIO_InitTypeDef GPIO_KEEY_InitStruct;//使能GPIOF时钟RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);//初始化结构体GPIO_KEEY_InitStruct.GPIO_Pin = GPIO_Pin_0; //定义引脚GPIO_KEEY_InitStruct.GPIO_Mode = GPIO_Mode_IN; //定义输出模式GPIO_KEEY_InitStruct.GPIO_Speed = GPIO_Speed_100MHz; //定义速度GPIO_KEEY_InitStruct.GPIO_PuPd = GPIO_PuPd_UP; //定义是否有上下拉电阻 普通//将结构体给GPIOF组GPIO_Init(GPIOA,&GPIO_KEEY_InitStruct);GPIO_KEEY_InitStruct.GPIO_Pin = GPIO_Pin_2 | GPIO_Pin_3 | GPIO_Pin_4;GPIO_Init(GPIOE,&GPIO_KEEY_InitStruct);
}
//两个引脚整体初始化函数
void init_GPIO_EF_OUT()
{//定义GPIO结构体GPIO_InitTypeDef GPIO_InitStruct;//使能GPIOF时钟RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE, ENABLE);RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);//初始化结构体GPIO_InitStruct.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //定义引脚GPIO_InitStruct.GPIO_Mode = GPIO_Mode_OUT; //定义输出模式GPIO_InitStruct.GPIO_Speed = GPIO_Speed_100MHz; //定义速度GPIO_InitStruct.GPIO_OType = GPIO_OType_PP; //定义推挽输出GPIO_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL; //定义是否有上下拉电阻 普通//将结构体给GPIOF组GPIO_Init(GPIOF,&GPIO_InitStruct);GPIO_InitStruct.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14; //定义引脚//将结构体给GPIOE组GPIO_Init(GPIOE,&GPIO_InitStruct);
}
//定时器14及PF9复用PWM初始化
void init_TIM14_PF9(void)
{//定义GPIO结构体GPIO_InitTypeDef GPIOF_InitStruct;//使能GPIOF时钟RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);//初始化结构体GPIOF_InitStruct.GPIO_Pin = GPIO_Pin_9; //定义引脚GPIOF_InitStruct.GPIO_Mode = GPIO_Mode_AF; //定义输出模式GPIOF_InitStruct.GPIO_Speed = GPIO_Speed_100MHz; //定义速度GPIOF_InitStruct.GPIO_OType = GPIO_OType_PP; //定义推免输出GPIOF_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL; //定义是否有上下拉电阻 普通//复用功能 定时器14GPIO_PinAFConfig(GPIOF, GPIO_PinSource9, GPIO_AF_TIM14);//将结构体给GPIOF组GPIO_Init(GPIOF,&GPIOF_InitStruct);TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure; //定时器复用功能结构体//NVIC_InitTypeDef NVIC_InitStructure;/* TIM3 clock enable */ //使能定时器3时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM14, ENABLE);//重转载寄存器 定义计数值 决定了计数多少次就进行一次中断 不得大于分频以后的计数值 若改为5000为0.5秒TIM_TimeBaseStructure.TIM_Period = 100-1; //10ms周期TIM_TimeBaseStructure.TIM_Prescaler = 8400-1; //定时器预分频 168000000/2/8400=10000 其值系统默认+1 每10000次计数为1秒TIM_TimeBaseStructure.TIM_ClockDivision = 0; //选择计数模式 向上计数TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数TIM_TimeBaseInit(TIM14, &TIM_TimeBaseStructure);//设置中断触发方式 计数更新TIM_ITConfig(TIM14,TIM_IT_Update, ENABLE);TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //PWM模式1 有效状态为小于计数的比较值时TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //输出使能TIM_OCInitStructure.TIM_Pulse = 0; //设置比较值 小于x时为有效 总计数值为100 周期为10msTIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //有效状态为高电平//输出化OCTIM_OC1Init(TIM14, &TIM_OCInitStructure);//使能OCTIM_OC1PreloadConfig(TIM14, TIM_OCPreload_Enable);// NVIC_InitTypeDef NVIC_InitStruct;
// NVIC_InitStruct.NVIC_IRQChannel = TIM8_TRG_COM_TIM14_IRQn;
// NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0; //中断抢占优先级
// NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1; //响应优先级
// NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE; //这一项关闭的话 定时器也会关闭
// NVIC_Init(&NVIC_InitStruct);TIM_Cmd(TIM14, ENABLE);TIM_CtrlPWMOutputs(TIM14,ENABLE); //使能PWM输出控制
}
//定时器1及PE13复用PWM初始化
void init_TIM1_PE13(void)
{//定义GPIO结构体GPIO_InitTypeDef GPIOE_InitStruct;//使能GPIOF时钟RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE, ENABLE);//初始化结构体GPIOE_InitStruct.GPIO_Pin = GPIO_Pin_13; //定义引脚GPIOE_InitStruct.GPIO_Mode = GPIO_Mode_AF; //定义输出模式GPIOE_InitStruct.GPIO_Speed = GPIO_Speed_100MHz; //定义速度GPIOE_InitStruct.GPIO_OType = GPIO_OType_PP; //定义推免输出GPIOE_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL; //定义是否有上下拉电阻 普通//复用功能 定时器14GPIO_PinAFConfig(GPIOE, GPIO_PinSource13, GPIO_AF_TIM1);//将结构体给GPIOF组GPIO_Init(GPIOE,&GPIOE_InitStruct);TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure; //定时器复用功能结构体//NVIC_InitTypeDef NVIC_InitStructure;/* TIM3 clock enable */ //使能定时器3时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);//重转载寄存器 定义计数值 决定了计数多少次就进行一次中断 不得大于分频以后的计数值 若改为5000为0.5秒TIM_TimeBaseStructure.TIM_Period = 100-1; //10ms周期TIM_TimeBaseStructure.TIM_Prescaler = 8400-1; //定时器预分频 168000000/2/8400=10000 其值系统默认+1 每10000次计数为1秒TIM_TimeBaseStructure.TIM_ClockDivision = 0; //选择计数模式 向上计数TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);//设置中断触发方式 计数更新TIM_ITConfig(TIM1,TIM_IT_Update, ENABLE);TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //PWM模式1 有效状态为小于计数的比较值时TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //输出使能TIM_OCInitStructure.TIM_Pulse = 0; //设置比较值 小于x时为有效 总计数值为100 周期为10msTIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //有效状态为高电平//输出化OCTIM_OC3Init(TIM1, &TIM_OCInitStructure); //OC3表示通道3 即CH3//使能OCTIM_OC3PreloadConfig(TIM1, TIM_OCPreload_Enable);// NVIC_InitTypeDef NVIC_InitStruct;
// NVIC_InitStruct.NVIC_IRQChannel = TIM8_TRG_COM_TIM14_IRQn;
// NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0; //中断抢占优先级
// NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1; //响应优先级
// NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE; //这一项关闭的话 定时器也会关闭
// NVIC_Init(&NVIC_InitStruct);TIM_Cmd(TIM1, ENABLE);TIM_CtrlPWMOutputs(TIM1,ENABLE); //使能PWM输出控制
}
//定时器1及PE14复用PWM初始化
void init_TIM1_PE14(void)
{//定义GPIO结构体GPIO_InitTypeDef GPIOE_InitStruct;//使能GPIOF时钟RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE, ENABLE);//初始化结构体GPIOE_InitStruct.GPIO_Pin = GPIO_Pin_14; //定义引脚GPIOE_InitStruct.GPIO_Mode = GPIO_Mode_AF; //定义输出模式GPIOE_InitStruct.GPIO_Speed = GPIO_Speed_100MHz; //定义速度GPIOE_InitStruct.GPIO_OType = GPIO_OType_PP; //定义推免输出GPIOE_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL; //定义是否有上下拉电阻 普通//复用功能 定时器14GPIO_PinAFConfig(GPIOE, GPIO_PinSource14, GPIO_AF_TIM1);//将结构体给GPIOF组GPIO_Init(GPIOE,&GPIOE_InitStruct);TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure; //定时器复用功能结构体//NVIC_InitTypeDef NVIC_InitStructure;/* TIM3 clock enable */ //使能定时器3时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);//重转载寄存器 定义计数值 决定了计数多少次就进行一次中断 不得大于分频以后的计数值 若改为5000为0.5秒TIM_TimeBaseStructure.TIM_Period = 100-1; //10ms周期TIM_TimeBaseStructure.TIM_Prescaler = 8400-1; //定时器预分频 168000000/2/8400=10000 其值系统默认+1 每10000次计数为1秒TIM_TimeBaseStructure.TIM_ClockDivision = 0; //选择计数模式 向上计数TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure);//设置中断触发方式 计数更新TIM_ITConfig(TIM1,TIM_IT_Update, ENABLE);TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //PWM模式1 有效状态为小于计数的比较值时TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //输出使能TIM_OCInitStructure.TIM_Pulse = 0; //设置比较值 小于x时为有效 总计数值为100 周期为10msTIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //有效状态为高电平//输出化OCTIM_OC4Init(TIM1, &TIM_OCInitStructure); //OC4表示通道4 即CH4//使能OCTIM_OC4PreloadConfig(TIM1, TIM_OCPreload_Enable);// NVIC_InitTypeDef NVIC_InitStruct;
// NVIC_InitStruct.NVIC_IRQChannel = TIM8_TRG_COM_TIM14_IRQn;
// NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0; //中断抢占优先级
// NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1; //响应优先级
// NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE; //这一项关闭的话 定时器也会关闭
// NVIC_Init(&NVIC_InitStruct);TIM_Cmd(TIM1, ENABLE);TIM_CtrlPWMOutputs(TIM1,ENABLE); //使能PWM输出控制
}
//定时器13及PF8复用PWM初始化
void init_TIM13_PF8_F(uint32_t freq)
{//定义GPIO结构体GPIO_InitTypeDef GPIOF_InitStruct;//使能GPIOF时钟RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);//初始化结构体GPIOF_InitStruct.GPIO_Pin = GPIO_Pin_8; //定义引脚GPIOF_InitStruct.GPIO_Mode = GPIO_Mode_AF; //定义输出模式GPIOF_InitStruct.GPIO_Speed = GPIO_Speed_100MHz; //定义速度GPIOF_InitStruct.GPIO_OType = GPIO_OType_PP; //定义推免输出GPIOF_InitStruct.GPIO_PuPd = GPIO_PuPd_NOPULL; //定义是否有上下拉电阻 普通//复用功能 定时器14GPIO_PinAFConfig(GPIOF, GPIO_PinSource8, GPIO_AF_TIM13);//将结构体给GPIOF组GPIO_Init(GPIOF,&GPIOF_InitStruct);TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure; //定时器复用功能结构体//NVIC_InitTypeDef NVIC_InitStructure;/* TIM3 clock enable */ //使能定时器3时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM13, ENABLE);//重转载寄存器 定义计数值 决定了计数多少次就进行一次中断 不得大于分频以后的计数值 若改为5000为0.5秒TIM_TimeBaseStructure.TIM_Period = (10000/freq)-1; //10ms周期tim13_period = TIM_TimeBaseStructure.TIM_Period;TIM_TimeBaseStructure.TIM_Prescaler = 8400-1; //定时器预分频 168000000/2/8400=10000 其值系统默认+1 每10000次计数为1秒TIM_TimeBaseStructure.TIM_ClockDivision = 0; //选择计数模式 向上计数TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数TIM_TimeBaseInit(TIM13, &TIM_TimeBaseStructure);//设置中断触发方式 计数更新TIM_ITConfig(TIM13,TIM_IT_Update, ENABLE);TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //PWM模式1 有效状态为小于计数的比较值时TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //输出使能TIM_OCInitStructure.TIM_Pulse = 0; //设置比较值 小于x时为有效 总计数值为100 周期为10msTIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //有效状态为高电平//输出化OCTIM_OC1Init(TIM13, &TIM_OCInitStructure);//使能OCTIM_OC1PreloadConfig(TIM13, TIM_OCPreload_Enable);// NVIC_InitTypeDef NVIC_InitStruct;
// NVIC_InitStruct.NVIC_IRQChannel = TIM8_UP_TIM13_IRQn;
// NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0; //中断抢占优先级
// NVIC_InitStruct.NVIC_IRQChannelSubPriority = 2; //响应优先级
// NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE; //这一项关闭的话 定时器也会关闭
// NVIC_Init(&NVIC_InitStruct);TIM_Cmd(TIM13, ENABLE);
}
//设置定时器13的PWM占空比
//0%~100% 0.0 ~ 1
void TIM13_Set_duty(uint16_t duty)
{uint32_t cmp=0;cmp = (tim13_period+1)*duty/100;//比较值TIM_SetCompare1(TIM13,cmp);
}
int main(void)
{
// init_KEEY();init_GPIO_EF_OUT();delay_ms(500);PF_BUS_O(0xFFFF);PE_BUS_O(0xFFFF);
// init_TIM14_PF9();
// init_TIM1_PE13();
// init_TIM1_PE14();TIM_SetCompare1(TIM14,100); //设置比较值TIM_SetCompare3(TIM1,100);TIM_SetCompare4(TIM1,100);int PWM;init_BEEP();PF_O(8)=0;TIM_Cmd(TIM13, DISABLE);init_USART1(115200);USART_SendData(USART1,'y');while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);USART_SendData(USART1,'y');while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);USART_SendData(USART1,'y');while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);while(1){ while(PE_I(3)==0){while(1){init_TIM13_PF8_F(880);TIM13_Set_duty(25);delay_ms(500);init_TIM13_PF8_F(1318);TIM13_Set_duty(25);delay_ms(500);init_TIM13_PF8_F(1318);TIM13_Set_duty(25);delay_ms(500);init_TIM13_PF8_F(1046);TIM13_Set_duty(25);delay_ms(500);init_TIM13_PF8_F(988);TIM13_Set_duty(25);delay_ms(500);init_TIM13_PF8_F(988);TIM13_Set_duty(25);delay_ms(500);init_TIM13_PF8_F(988);TIM13_Set_duty(25);delay_ms(500);init_TIM13_PF8_F(988);TIM13_Set_duty(25);delay_ms(250);init_TIM13_PF8_F(1046);TIM13_Set_duty(25);delay_ms(250);}//if(PA_I(0)==1)TIM13_Set_duty(0);break;}while(PA_I(0)==0){init_TIM13_PF8_F(784*2/3);TIM13_Set_duty(25);delay_ms(250);init_TIM13_PF8_F(784*2/3);TIM13_Set_duty(25);delay_ms(250);init_TIM13_PF8_F(880*2/3);TIM13_Set_duty(25);delay_ms(500);init_TIM13_PF8_F(784*2/3);TIM13_Set_duty(25);delay_ms(500);init_TIM13_PF8_F(1046*2/3);TIM13_Set_duty(25);delay_ms(500);init_TIM13_PF8_F(987*2/3);TIM13_Set_duty(25);delay_ms(1000);init_TIM13_PF8_F(784*2/3);TIM13_Set_duty(25);delay_ms(250);init_TIM13_PF8_F(784*2/3);TIM13_Set_duty(25);delay_ms(250);init_TIM13_PF8_F(880*2/3);TIM13_Set_duty(25);delay_ms(500);init_TIM13_PF8_F(784*2/3);TIM13_Set_duty(25);delay_ms(500);init_TIM13_PF8_F(1175*2/3);TIM13_Set_duty(25);delay_ms(500);init_TIM13_PF8_F(1046*2/3);TIM13_Set_duty(25);delay_ms(1000);init_TIM13_PF8_F(784*2/3);TIM13_Set_duty(25);delay_ms(250);init_TIM13_PF8_F(784*2/3);TIM13_Set_duty(25);delay_ms(250);init_TIM13_PF8_F(1568*2/3);TIM13_Set_duty(25);delay_ms(500);init_TIM13_PF8_F(1318*2/3);TIM13_Set_duty(25);delay_ms(500);init_TIM13_PF8_F(1046*2/3);TIM13_Set_duty(25);delay_ms(500);init_TIM13_PF8_F(987*2/3);TIM13_Set_duty(25);delay_ms(500);init_TIM13_PF8_F(880*2/3);TIM13_Set_duty(25);delay_ms(500);delay_ms(500);init_TIM13_PF8_F(1397*2/3);TIM13_Set_duty(25);delay_ms(250);init_TIM13_PF8_F(1397*2/3);TIM13_Set_duty(25);delay_ms(250);init_TIM13_PF8_F(1318*2/3);TIM13_Set_duty(25);delay_ms(500);init_TIM13_PF8_F(1046*2/3);TIM13_Set_duty(25);delay_ms(500);init_TIM13_PF8_F(1175*2/3);TIM13_Set_duty(25);delay_ms(500);init_TIM13_PF8_F(1046*2/3);TIM13_Set_duty(25);delay_ms(2000);if(PA_I(0)==1)TIM13_Set_duty(0);break;}while(PE_I(2)==0){for(PWM=100;PWM>0;PWM--){TIM_SetCompare1(TIM14,100-PWM); //设置比较值TIM_SetCompare3(TIM1,100-PWM);TIM_SetCompare4(TIM1,100-PWM);delay_ms(10);if(PE_I(2)==1){TIM_SetCompare1(TIM14,100); //设置比较值TIM_SetCompare3(TIM1,100);TIM_SetCompare4(TIM1,100);break;}}for(PWM=0;PWM<100;PWM++){TIM_SetCompare1(TIM14,100-PWM); //设置比较值TIM_SetCompare3(TIM1,100-PWM);TIM_SetCompare4(TIM1,100-PWM);delay_ms(10);if(PE_I(2)==1){TIM_SetCompare1(TIM14,100); //设置比较值TIM_SetCompare3(TIM1,100);TIM_SetCompare4(TIM1,100);break;}}if(PE_I(2)==1){TIM_SetCompare1(TIM14,100); //设置比较值TIM_SetCompare3(TIM1,100);TIM_SetCompare4(TIM1,100);break;}}}
}
void USART1_IRQHandler(void) //串口1中断服务函数
{if(USART_GetITStatus(USART1,USART_IT_RXNE)==SET){ char data = USART_ReceiveData(USART1);USART_SendData(USART1,data);while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);if(data=='0')//接收数据{PE_BUS_O(0x0000);PF_BUS_O(0x0000);}if(data=='1')//接收数据{PE_BUS_O(0xFFFF);PF_BUS_O(0xFFFF);}USART_ClearITPendingBit(USART1,USART_IT_RXNE);//清空标志位}
}之前的文章:
blog.csdn.net/weixin_53403301/article/details/121599951
Cortex-M架构SysTick系统定时器阻塞和非阻塞延时
首先是最常用的阻塞延时
void delay_ms(unsigned int ms)
{SysTick->LOAD = 50000000/1000-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器while(ms--){while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待}SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
void delay_us(unsigned int us)
{SysTick->LOAD = 50000000/1000/1000-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器while(us--){while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待}SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
50000000表示工作频率
分频后即可得到不同的延时时间
以此类推
那么 不用两个嵌套while循环 也可以写成:
void delay_ms(unsigned int ms)
{SysTick->LOAD = 50000000/1000*ms-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
void delay_us(unsigned int us)
{SysTick->LOAD = 50000000/1000/1000*us-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
但是这种写法有个弊端
那就是输入ms后,最大定时不得超过计数值,也就是不能超过LOAD的最大值,否则溢出以后,则无法正常工作
而LOAD如果最大是32位 也就是4294967295
晶振为50M的话 50M的计数值为1s 4294967295计数值约为85s
固最大定时时间为85s
但用嵌套while的话 最大可以支持定时4294967295*85s
如果采用非阻塞的话 直接改写第二种方法就好了:
void delay_ms(unsigned int ms)
{SysTick->LOAD = 50000000/1000*ms-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器//while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待//SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
void delay_us(unsigned int us)
{SysTick->LOAD = 50000000/1000/1000*us-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器//while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待//SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
将等待和关闭定时器语句去掉
在使用时加上判断即可变为阻塞:
delay_ms(500);
while ((SysTick->CTRL & 0x00010000)==0);
SysTick->CTRL = 0;
在非阻塞状态下 可以提交定时器后 去做别的事情 然后再来等待
不过这样又有一个弊端 那就是定时器会自动重载 可能做别的事情以后 定时器跑过了 然后就要等85s才能停下
故可以通过内部定时器来进行非阻塞延时函数的编写
基本上每个mcu的内部定时器都可以配置自动重载等功能 网上资料很多 这里就不再阐述了
附录:Cortex-M架构的SysTick系统定时器精准延时和MCU位带操作
SysTick系统定时器精准延时
延时函数
SysTick->LOAD中的值为计数值
计算方法为工作频率值/分频值
比如工作频率/1000 则周期为1ms
以ADuCM4050为例:
#include "ADuCM4050.h"void delay_ms(unsigned int ms)
{SysTick->LOAD = 26000000/1000-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能52MHz的系统定时器while(ms--){while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待}SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
void delay_us(unsigned int us)
{SysTick->LOAD = 26000000/1000/1000-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能52MHz的系统定时器while(us--){while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待}SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}其中的52000000表示芯片的系统定时器频率 32系列一般为外部定时器频率的两倍
Cortex-M架构SysTick系统定时器阻塞和非阻塞延时
阻塞延时
首先是最常用的阻塞延时
void delay_ms(unsigned int ms)
{SysTick->LOAD = 50000000/1000-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器while(ms--){while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待}SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
void delay_us(unsigned int us)
{SysTick->LOAD = 50000000/1000/1000-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器while(us--){while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待}SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
50000000表示工作频率
分频后即可得到不同的延时时间
以此类推
那么 不用两个嵌套while循环 也可以写成:
void delay_ms(unsigned int ms)
{SysTick->LOAD = 50000000/1000*ms-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
void delay_us(unsigned int us)
{SysTick->LOAD = 50000000/1000/1000*us-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
但是这种写法有个弊端
那就是输入ms后,最大定时不得超过计数值,也就是不能超过LOAD的最大值,否则溢出以后,则无法正常工作
而LOAD如果最大是32位 也就是4294967295
晶振为50M的话 50M的计数值为1s 4294967295计数值约为85s
固最大定时时间为85s
但用嵌套while的话 最大可以支持定时4294967295*85s
非阻塞延时
如果采用非阻塞的话 直接改写第二种方法就好了:
void delay_ms(unsigned int ms)
{SysTick->LOAD = 50000000/1000*ms-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器//while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待//SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
void delay_us(unsigned int us)
{SysTick->LOAD = 50000000/1000/1000*us-1; // Count from 255 to 0 (256 cycles) 载入计数值 定时器从这个值开始计数SysTick->VAL = 0; // Clear current value as well as count flag 清空计数值到达0后的标记SysTick->CTRL = 5; // Enable SysTick timer with processor clock 使能26MHz的系统定时器//while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set 等待//SysTick->CTRL = 0; // Disable SysTick 关闭系统定时器
}
将等待和关闭定时器语句去掉
在使用时加上判断即可变为阻塞:
delay_ms(500);
while ((SysTick->CTRL & 0x00010000)==0);
SysTick->CTRL = 0;
在非阻塞状态下 可以提交定时器后 去做别的事情 然后再来等待
不过这样又有一个弊端 那就是定时器会自动重载 可能做别的事情以后 定时器跑过了 然后就要等85s才能停下
故可以通过内部定时器来进行非阻塞延时函数的编写
基本上每个mcu的内部定时器都可以配置自动重载等功能 网上资料很多 这里就不再阐述了
位带操作
位带代码
M3、M4架构的单片机 其输出口地址为端口地址+20 输入为+16
M0架构的单片机 其输出口地址为端口地址+12 输入为+8
以ADuCM4050为列:
位带宏定义
#ifndef __GPIO_H__
#define __GPIO_H__
#include "ADuCM4050.h"
#include "adi_gpio.h"#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))#define GPIO0_ODR_Addr (ADI_GPIO0_BASE+20) //0x40020014
#define GPIO0_IDR_Addr (ADI_GPIO0_BASE+16) //0x40020010#define GPIO1_ODR_Addr (ADI_GPIO1_BASE+20) //0x40020054
#define GPIO1_IDR_Addr (ADI_GPIO1_BASE+16) //0x40020050#define GPIO2_ODR_Addr (ADI_GPIO2_BASE+20) //0x40020094
#define GPIO2_IDR_Addr (ADI_GPIO2_BASE+16) //0x40020090#define GPIO3_ODR_Addr (ADI_GPIO3_BASE+20) //0x400200D4
#define GPIO3_IDR_Addr (ADI_GPIO3_BASE+16) //0x400200D0#define P0_O(n) BIT_ADDR(GPIO0_ODR_Addr,n) //输出
#define P0_I(n) BIT_ADDR(GPIO0_IDR_Addr,n) //输入 #define P1_O(n) BIT_ADDR(GPIO1_ODR_Addr,n) //输出
#define P1_I(n) BIT_ADDR(GPIO1_IDR_Addr,n) //输入 #define P2_O(n) BIT_ADDR(GPIO2_ODR_Addr,n) //输出
#define P2_I(n) BIT_ADDR(GPIO2_IDR_Addr,n) //输入 #define P3_O(n) BIT_ADDR(GPIO3_ODR_Addr,n) //输出
#define P3_I(n) BIT_ADDR(GPIO3_IDR_Addr,n) //输入 #define Port0 (ADI_GPIO_PORT0)
#define Port1 (ADI_GPIO_PORT1)
#define Port2 (ADI_GPIO_PORT2)
#define Port3 (ADI_GPIO_PORT3)#define Pin0 (ADI_GPIO_PIN_0)
#define Pin1 (ADI_GPIO_PIN_1)
#define Pin2 (ADI_GPIO_PIN_2)
#define Pin3 (ADI_GPIO_PIN_3)
#define Pin4 (ADI_GPIO_PIN_4)
#define Pin5 (ADI_GPIO_PIN_5)
#define Pin6 (ADI_GPIO_PIN_6)
#define Pin7 (ADI_GPIO_PIN_7)
#define Pin8 (ADI_GPIO_PIN_8)
#define Pin9 (ADI_GPIO_PIN_9)
#define Pin10 (ADI_GPIO_PIN_10)
#define Pin11 (ADI_GPIO_PIN_11)
#define Pin12 (ADI_GPIO_PIN_12)
#define Pin13 (ADI_GPIO_PIN_13)
#define Pin14 (ADI_GPIO_PIN_14)
#define Pin15 (ADI_GPIO_PIN_15)void GPIO_OUT(unsigned int port,unsigned int pin,unsigned int flag);
void GPIO_BUS_OUT(unsigned int port,unsigned int num);void P0_BUS_O(unsigned int num);
unsigned int P0_BUS_I(void);void P1_BUS_O(unsigned int num);
unsigned int P1_BUS_I(void);void P2_BUS_O(unsigned int num);
unsigned int P2_BUS_I(void);void P3_BUS_O(unsigned int num);
unsigned int P3_BUS_I(void);#endif总线函数
#include "ADuCM4050.h"
#include "adi_gpio.h"
#include "GPIO.h"void GPIO_OUT(unsigned int port,unsigned int pin,unsigned int flag)
{switch(port){case 0:{switch(pin){case 0:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_0));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_0));};break;case 1:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_1));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_1));};break;case 2:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_2));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_2));};break;case 3:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_3));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_3));};break;case 4:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_4));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_4));};break;case 5:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_5));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_5));};break;case 6:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_6));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_6));};break;case 7:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_7));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_7));};break;case 8:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_8));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_8));};break;case 9:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_9));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_9));};break;case 10:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_10));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_10));};break;case 11:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_11));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_11));};break;case 12:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_12));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_12));};break;case 13:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_13));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_13));};break;case 14:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_14));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_14));};break;case 15:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT0),(ADI_GPIO_PIN_15));}else{adi_gpio_SetLow((ADI_GPIO_PORT0),(ADI_GPIO_PIN_15));};break;default:pin=0;break;}}break;case 1:{switch(pin){case 0:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_0));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_0));};break;case 1:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_1));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_1));};break;case 2:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_2));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_2));};break;case 3:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_3));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_3));};break;case 4:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_4));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_4));};break;case 5:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_5));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_5));};break;case 6:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_6));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_6));};break;case 7:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_7));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_7));};break;case 8:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_8));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_8));};break;case 9:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_9));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_9));};break;case 10:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_10));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_10));};break;case 11:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_11));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_11));};break;case 12:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_12));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_12));};break;case 13:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_13));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_13));};break;case 14:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_14));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_14));};break;case 15:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT1),(ADI_GPIO_PIN_15));}else{adi_gpio_SetLow((ADI_GPIO_PORT1),(ADI_GPIO_PIN_15));};break;default:pin=0;break;}}break;case 2:{switch(pin){case 0:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_0));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_0));};break;case 1:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_1));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_1));};break;case 2:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_2));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_2));};break;case 3:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_3));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_3));};break;case 4:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_4));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_4));};break;case 5:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_5));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_5));};break;case 6:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_6));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_6));};break;case 7:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_7));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_7));};break;case 8:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_8));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_8));};break;case 9:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_9));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_9));};break;case 10:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_10));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_10));};break;case 11:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_11));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_11));};break;case 12:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_12));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_12));};break;case 13:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_13));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_13));};break;case 14:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_14));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_14));};break;case 15:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT2),(ADI_GPIO_PIN_15));}else{adi_gpio_SetLow((ADI_GPIO_PORT2),(ADI_GPIO_PIN_15));};break;default:pin=0;break;}}break;case 3:{switch(pin){case 0:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_0));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_0));};break;case 1:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_1));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_1));};break;case 2:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_2));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_2));};break;case 3:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_3));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_3));};break;case 4:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_4));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_4));};break;case 5:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_5));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_5));};break;case 6:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_6));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_6));};break;case 7:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_7));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_7));};break;case 8:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_8));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_8));};break;case 9:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_9));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_9));};break;case 10:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_10));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_10));};break;case 11:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_11));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_11));};break;case 12:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_12));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_12));};break;case 13:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_13));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_13));};break;case 14:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_14));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_14));};break;case 15:if(flag==1){adi_gpio_SetHigh((ADI_GPIO_PORT3),(ADI_GPIO_PIN_15));}else{adi_gpio_SetLow((ADI_GPIO_PORT3),(ADI_GPIO_PIN_15));};break;default:pin=0;break;}}break;default:port=0;break;}
}void GPIO_BUS_OUT(unsigned int port,unsigned int num) //num最大为0xffff
{int i;for(i=0;i<16;i++){GPIO_OUT(port,i,(num>>i)&0x0001);}
}void P0_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){P0_O(i)=(num>>i)&0x0001;}
}
unsigned int P0_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(P0_I(i)<<i)&0xFFFF;}return num;
}void P1_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){P1_O(i)=(num>>i)&0x0001;}
}
unsigned int P1_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(P1_I(i)<<i)&0xFFFF;}return num;
}void P2_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){P2_O(i)=(num>>i)&0x0001;}
}
unsigned int P2_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(P2_I(i)<<i)&0xFFFF;}return num;
}void P3_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){P3_O(i)=(num>>i)&0x0001;}
}
unsigned int P3_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(P3_I(i)<<i)&0xFFFF;}return num;
}一、位带操作理论及实践
位带操作的概念其实30年前就有了,那还是 CM3 将此能力进化,这里的位带操作是 8051 位寻址区的威力大幅加强版
位带区: 支持位带操作的地址区
位带别名: 对别名地址的访问最终作 用到位带区的访问上(注意:这中途有一个 地址映射过程)
位带操作对于硬件 I/O 密集型的底层程序最有用处
支持了位带操作后,可以使用普通的加载/存储指令来对单一的比特进行读写。在CM4中,有两个区中实现了位带。其中一个是SRAM区的最低1MB范围,第二个则是片内外设区的最低1MB范围。这两个区中的地址除了可以像普通的RAM一样使用外,它们还都有自己的“位带别名区”,位带别名区把每个比特膨胀成一个32位的字。当你通过位带别名区访问这些字时,就可以达到访问原始比特的目的。
位操作就是可以单独的对一个比特位读和写,类似与51中sbit定义的变量,stm32中通过访问位带别名区来实现位操作的功能
STM32中有两个地方实现了位带,一个是SRAM,一个是片上外设。
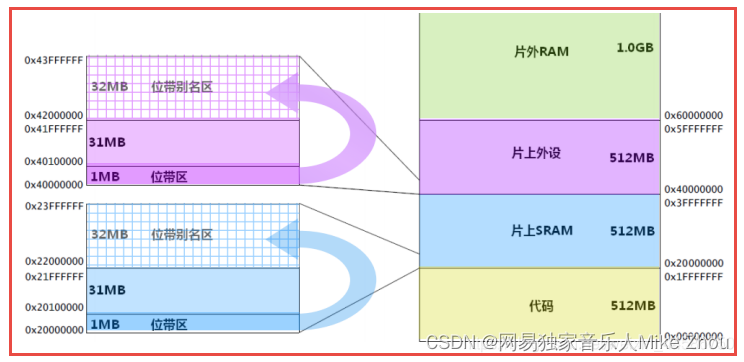
(1)位带本质上是一块地址区(例如每一位地址位对应一个寄存器)映射到另一片地址区(实现每一位地址位对应一个寄存器中的一位),该区域就叫做位带别名区,将每一位膨胀成一个32位的字。
(2)位带区的4个字节对应实际寄存器或内存区的一个位,虽然变大到4个字节,但实际上只有最低位有效(代表0或1)
只有位带可以直接用=赋值的方式来操作寄存器 位带是把寄存器上的每一位 膨胀到32位 映射到位带区 比如0x4002 0000地址的第0个bit 映射到位带区的0地址 那么其对应的位带映射地址为0x00 - 0x04 一共32位 但只有LSB有效 采用位带的方式用=赋值时 就是把位带区对应的LSB赋值 然后MCU再转到寄存器对应的位里面 寄存器操作时 如果不改变其他位上面的值 那就只能通过&=或者|=的方式进行
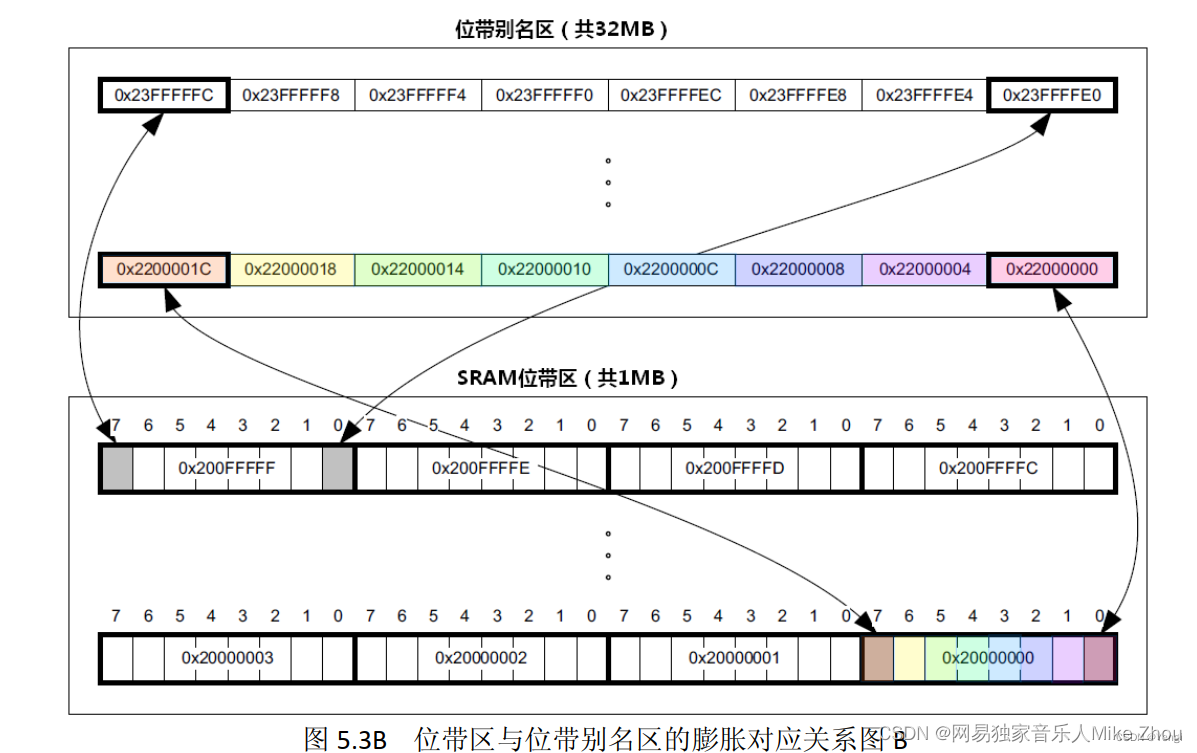
要设置0x2000 0000这个字节的第二个位bit2为1,使用位带操作的步骤有:
1、将1写入位 带别名区对应的映射地址(即0x22000008,因为1bit对应4个byte);
2、将0x2000 0000的值 读取到内部的缓冲区(这一步骤是内核完成的,属于原子操作,不需要用户操作);
3、将bit2置1,再把值写 回到0x2000 0000(属于原子操作,不需要用户操作)。
关于GPIO引脚对应的访问地址,可以参考以下公式
寄存器位带别名 = 0x42000000 + (寄存器的地址-0x40000000)32 + 引脚编号4
如:端口F访问的起始地址GPIOF_BASE
#define GPIOF ((GPIO_TypeDef *)GPIOF_BASE)
但好在官方库里面都帮我们定义好了 只需要在BASE地址加上便宜即可
例如:
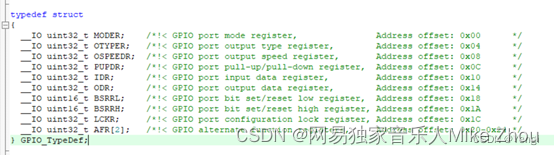
GPIOF的ODR寄存器的地址 = GPIOF_BASE + 0x14
寄存器位带别名 = 0x42000000 + (寄存器的地址-0x40000000)32 + 引脚编号4
设置PF9引脚的话:
uint32_t *PF9_BitBand =
*(uint32_t *)(0x42000000 + ((uint32_t )&GPIOF->ODR– 0x40000000) *32 + 9*4)封装一下:
#define PFout(x) *(volatile uint32_t *)(0x42000000 + ((uint32_t )&GPIOF->ODR – 0x40000000) *32 + x*4)现在 可以把通用部分封装成一个小定义:
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))
那么 设置PF引脚的函数可以定义:
#define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414
#define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410 #define PF_O(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出
#define PF_I(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入
若使PF9输入输出则:
PF_O(9)=1; //输出高电平
uint8_t dat = PF_I(9); //获取PF9引脚的值
总线输入输出:
void PF_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PF_O(i)=(num>>i)&0x0001;}
}
unsigned int PF_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PF_I(i)<<i)&0xFFFF;}return num;
}
STM32的可用下面的函数:
#ifndef __GPIO_H__
#define __GPIO_H__
#include "stm32l496xx.h"#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x2000000+((addr &0xFFFFF)<<5)+(bitnum<<2))
#define MEM_ADDR(addr) *((volatile unsigned long *)(addr))
#define BIT_ADDR(addr, bitnum) MEM_ADDR(BITBAND(addr, bitnum))#define GPIOA_ODR_Addr (GPIOA_BASE+20) //0x40020014
#define GPIOB_ODR_Addr (GPIOB_BASE+20) //0x40020414
#define GPIOC_ODR_Addr (GPIOC_BASE+20) //0x40020814
#define GPIOD_ODR_Addr (GPIOD_BASE+20) //0x40020C14
#define GPIOE_ODR_Addr (GPIOE_BASE+20) //0x40021014
#define GPIOF_ODR_Addr (GPIOF_BASE+20) //0x40021414
#define GPIOG_ODR_Addr (GPIOG_BASE+20) //0x40021814
#define GPIOH_ODR_Addr (GPIOH_BASE+20) //0x40021C14
#define GPIOI_ODR_Addr (GPIOI_BASE+20) //0x40022014 #define GPIOA_IDR_Addr (GPIOA_BASE+16) //0x40020010
#define GPIOB_IDR_Addr (GPIOB_BASE+16) //0x40020410
#define GPIOC_IDR_Addr (GPIOC_BASE+16) //0x40020810
#define GPIOD_IDR_Addr (GPIOD_BASE+16) //0x40020C10
#define GPIOE_IDR_Addr (GPIOE_BASE+16) //0x40021010
#define GPIOF_IDR_Addr (GPIOF_BASE+16) //0x40021410
#define GPIOG_IDR_Addr (GPIOG_BASE+16) //0x40021810
#define GPIOH_IDR_Addr (GPIOH_BASE+16) //0x40021C10
#define GPIOI_IDR_Addr (GPIOI_BASE+16) //0x40022010 #define PA_O(n) BIT_ADDR(GPIOA_ODR_Addr,n) //输出
#define PA_I(n) BIT_ADDR(GPIOA_IDR_Addr,n) //输入 #define PB_O(n) BIT_ADDR(GPIOB_ODR_Addr,n) //输出
#define PB_I(n) BIT_ADDR(GPIOB_IDR_Addr,n) //输入 #define PC_O(n) BIT_ADDR(GPIOC_ODR_Addr,n) //输出
#define PC_I(n) BIT_ADDR(GPIOC_IDR_Addr,n) //输入 #define PD_O(n) BIT_ADDR(GPIOD_ODR_Addr,n) //输出
#define PD_I(n) BIT_ADDR(GPIOD_IDR_Addr,n) //输入 #define PE_O(n) BIT_ADDR(GPIOE_ODR_Addr,n) //输出
#define PE_I(n) BIT_ADDR(GPIOE_IDR_Addr,n) //输入#define PF_O(n) BIT_ADDR(GPIOF_ODR_Addr,n) //输出
#define PF_I(n) BIT_ADDR(GPIOF_IDR_Addr,n) //输入#define PG_O(n) BIT_ADDR(GPIOG_ODR_Addr,n) //输出
#define PG_I(n) BIT_ADDR(GPIOG_IDR_Addr,n) //输入#define PH_O(n) BIT_ADDR(GPIOH_ODR_Addr,n) //输出
#define PH_I(n) BIT_ADDR(GPIOH_IDR_Addr,n) //输入#define PI_O(n) BIT_ADDR(GPIOI_ODR_Addr,n) //输出
#define PI_I(n) BIT_ADDR(GPIOI_IDR_Addr,n) //输入void PA_BUS_O(unsigned int num);
unsigned int PA_BUS_I(void);void PB_BUS_O(unsigned int num);
unsigned int PB_BUS_I(void);void PC_BUS_O(unsigned int num);
unsigned int PC_BUS_I(void);void PD_BUS_O(unsigned int num);
unsigned int PD_BUS_I(void);void PE_BUS_O(unsigned int num);
unsigned int PE_BUS_I(void);void PF_BUS_O(unsigned int num);
unsigned int PF_BUS_I(void);void PG_BUS_O(unsigned int num);
unsigned int PG_BUS_I(void);void PH_BUS_O(unsigned int num);
unsigned int PH_BUS_I(void);void PI_BUS_O(unsigned int num);
unsigned int PI_BUS_I(void);#endif#include "GPIO.h"void PA_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PA_O(i)=(num>>i)&0x0001;}
}
unsigned int PA_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PA_I(i)<<i)&0xFFFF;}return num;
}void PB_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PB_O(i)=(num>>i)&0x0001;}
}
unsigned int PB_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PB_I(i)<<i)&0xFFFF;}return num;
}void PC_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PC_O(i)=(num>>i)&0x0001;}
}
unsigned int PC_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PC_I(i)<<i)&0xFFFF;}return num;
}void PD_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PD_O(i)=(num>>i)&0x0001;}
}
unsigned int PD_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PD_I(i)<<i)&0xFFFF;}return num;
}void PE_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PE_O(i)=(num>>i)&0x0001;}
}
unsigned int PE_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PE_I(i)<<i)&0xFFFF;}return num;
}void PF_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PF_O(i)=(num>>i)&0x0001;}
}
unsigned int PF_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PF_I(i)<<i)&0xFFFF;}return num;
}void PG_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PG_O(i)=(num>>i)&0x0001;}
}
unsigned int PG_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PG_I(i)<<i)&0xFFFF;}return num;
}void PH_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PH_O(i)=(num>>i)&0x0001;}
}
unsigned int PH_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PH_I(i)<<i)&0xFFFF;}return num;
}void PI_BUS_O(unsigned int num) //输入值num最大为0xFFFF
{int i;for(i=0;i<16;i++){PI_O(i)=(num>>i)&0x0001;}
}
unsigned int PI_BUS_I(void) //输出值num最大为0xFFFF
{unsigned int num;int i;for(i=0;i<16;i++){num=num+(PI_I(i)<<i)&0xFFFF;}return num;
}二、如何判断MCU的外设是否支持位带
根据《ARM Cortex-M3与Cortex-M4权威指南(第3版)》中第6章第7节描述
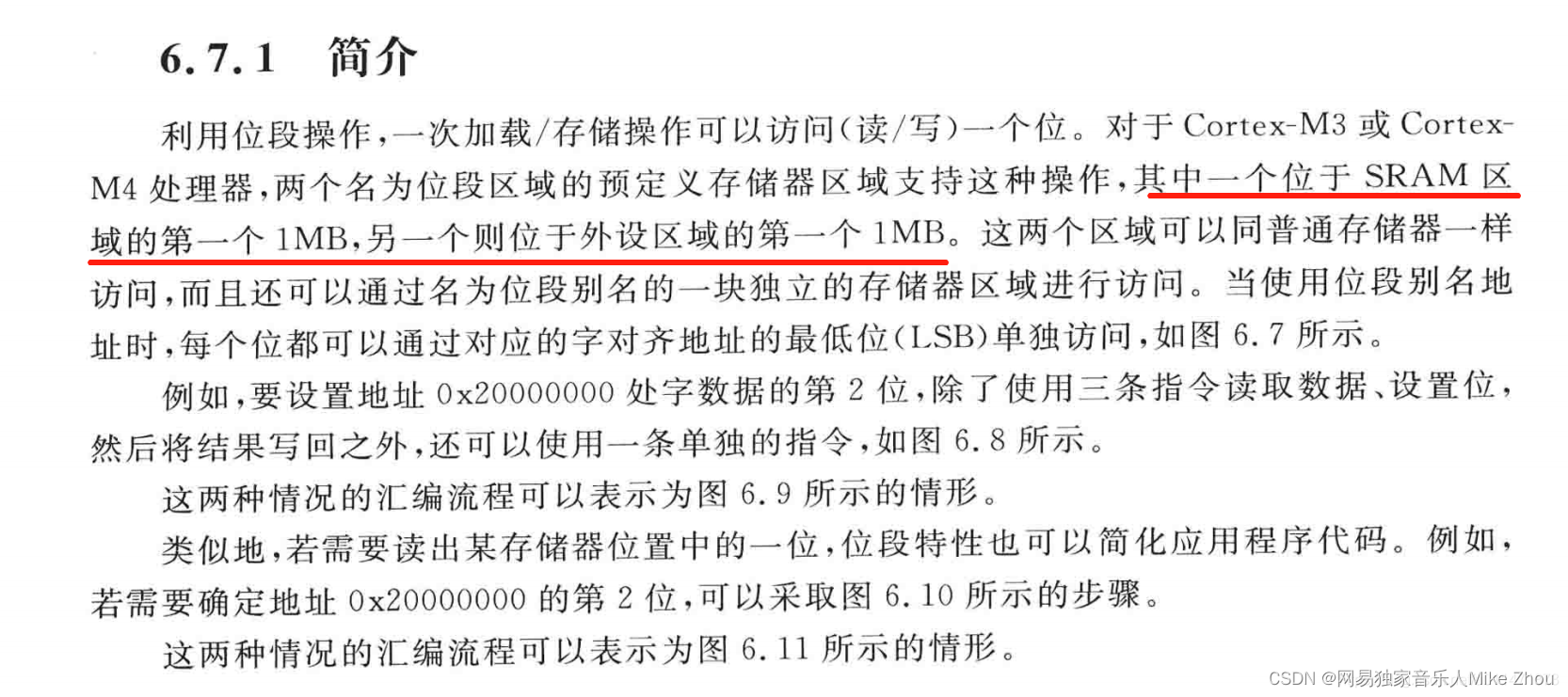
也就是说 要实现对GPIO的位带操作 必须保证GPIO位于外设区域的第一个1MB中
第一个1MB应该是0x4010 0000之前 位带不是直接操作地址 而是操作地址映射 地址映射被操作以后 MCU自动会修改对应寄存器的值
位带区只有1MB 所以只能改0x4000 0000 - 0x400F FFFF的寄存器
像F4系列 GPIO的首地址为0x4002 0000 就可以用位带来更改
STM32L476的GPIO就不行:
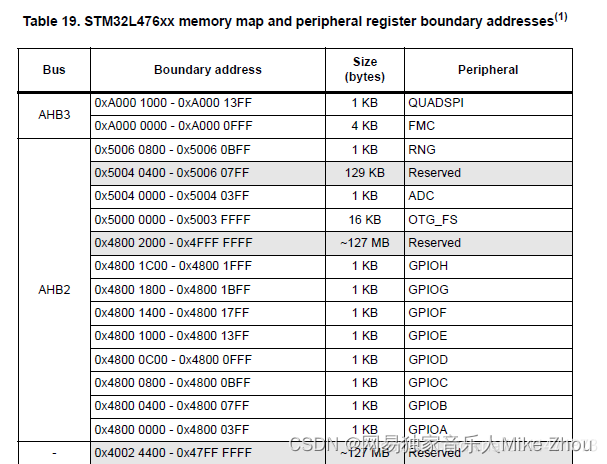
AHB2的都不能用位带
ABP 还有AHB1都可以用
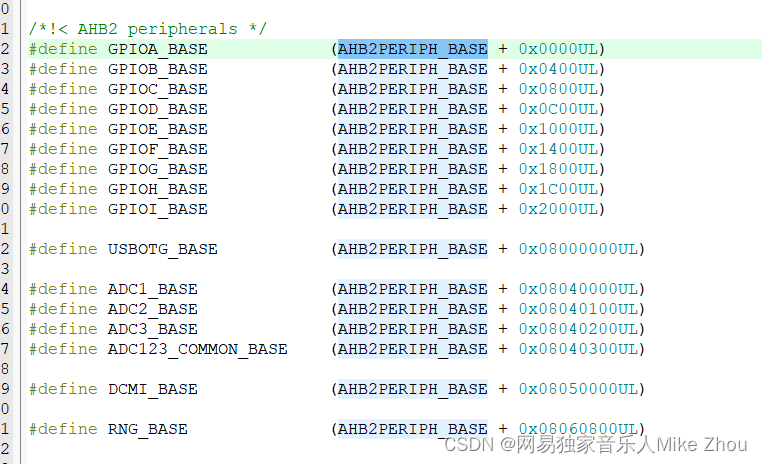
但是L476的寄存器里面 GPIO和ADC都是AHB2
这篇关于【优秀课设】基于stm32f407ze的蜂鸣器音乐(生日快乐、In The End)、PWM呼吸灯及串口通信系统的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





